Изобретение относится к транспортным устройствам для шагового перемещения деталей и может быть использовано в автоматических линиях.
Известен шагающий конвейер, содержащий неподвижную раму, подвижную раму, установленную на опорных роликах, эксцентриковые подъемники с пневмощ линдрами, электромеханический привод передвижения подвижной рамы 1.
Недостаток указанного конвейера состоит в сложности приводов подъема и перемещения подвижной рамы.
Наиболее близким к изобретению является шагающий конвейер, содержащий неподвижную раму, шарнирно закрепленные на ней двуплечие рычаги, одно из плеч каждого из которых на конце имеет ролик, а свободные от роликов плечи рычагов связаны тягой, установленную с возможностью возвратно-поступательного перемещения на роликах двуплечих рычагов подвижную раму, и привод подъема и перемещения подвижной рамы. Привод перемещения подвижной рамы выполнен в виде одного силового цилиндра, а привод ее подъема содержит несколько силовых цилиндров 2.
Недостаток указанного конвейера заключается в наличии большого количества силовых цилиндров, что значительно усложняет конструкцию конвейера.
Цель изобретения - упрощение конструкции конвейера.
Указанная цель достигается тем, что в шагающем конвейере, содержащем неподвижную раму, щарнирно закрепленные на ней двуплечие рычаги, одно из плеч каждого из которых на конце имеет ролик, а свободные от роликов плечи рычагов связаны тягой, установленную с возможностью возвратно-поступательного перемещения на роликах двуплечих рычагов подвижную раму и привод подъема и перемещения подвижной рамы, привод выполнен в виде эксцентрикового вала с жестко закрепленной на нем серьгой, шарнирно связанной с одним из плеч двуплечих рычагов, и выполненного в подвижной раме вертикального паза, в котором размещен эксцентриковый вал.
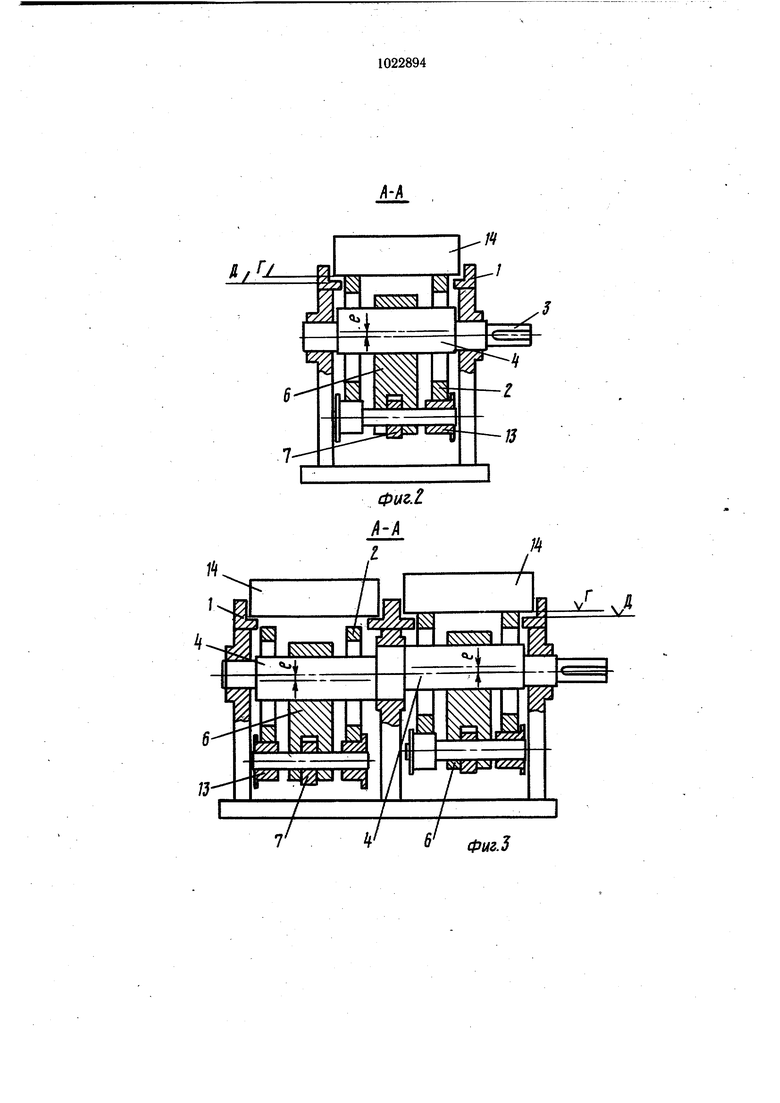
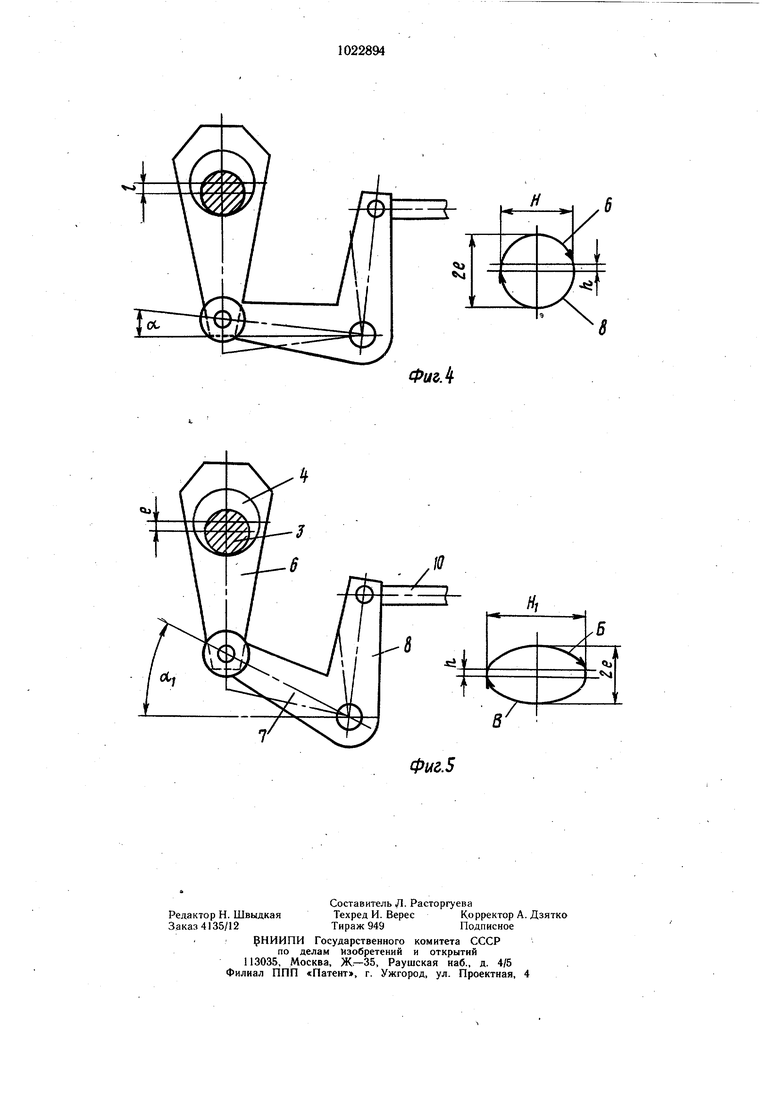
На фиг. 1 изображена схема устройства; на фиг. 2 - сечение А-А на фиг. 1, однорядное устройство; на фиг. 3 - то же, двухрядное устройство; на фиг. 4 и 5 - узел серьги с эксцентриковым валом.
Устройство содержит неподвижную 1 и подвижную 2 рамы. В подшипниковых
узлах неподвижной рамы 1 смонтирован эксцентриковый вал 3, соединенный с приводом вращения (не показан). Эксцентрик 4 вала 3 входит в вертикальные пазы 5 рамы 2. На эксцентрике 4 установлена сер.ьга 6, шарнирно соединенная с двуплечим рычагом с плечами 7 и 8, установленным с возможностью поворота на опоре 9, смонтированной на неподвижной раме 1. Плечо 8 рычага шарнирно соединено через тягу 10 с плечами 11 двуплечих рычагов, одно из плеч 12 которых имеет ролик 13.
Подвижная рама 2 установлена на роликах 13 с возможностью возвратно-поступательного перемещения. В зависимости от углаоК. наклона плеч 7 и 12 рычагов по отношению к горизонтальной оси траектории рамы 2 могут быть заданы различные формы, например, приближенные к окружности (фиг. 4) или в виде эллипса (фиг. 5). Оси плеч 7 к 12 рычагов, а также оси плеч 8 и 11 рычагов параллельны между собой. Центр траектории движения опорной поверхности Г рамы 2 расположен ниже опорной поверхности Д рамы 1 на величину h.
Устройство работает следующим образом.
В процессе вращения вала 3 эксцентрик 4 вала, взаимодействуя с вертикальными пазами 5 рамы 2, сообщает раме горизонтальные возвратно-поступательные перемещения. Одновременно серьга 6, взаимодействуя с эксцентриком 4 вала 3, сообщает рычагу с плечами 7 и 8 качательное движение на угол d, которое передается через тягу 10 на рычаги с плечами 11 и 12. Рычаги с помощью плеч 7 и 12 через ролики 13 сообщают раме 2 вертикальные возвратно-поступательные перемещения. Таким образом, подвижная рама 2 совершает относительно неподвижной рамы 1 круговые плоско-параллельные перемещения. В процессе движения по верхней Б полуокружности дуги рама 2 входит во взаимодействие с транспортируемыми деталями 14, приподнимает их над опорными площадками рамы 1 и перемещает в горизонтальном направлении. Не доходя на некоторое расстояние h до нижней В полуокружности дуги, рама 2 выходит из взаимодействия с деталями 14, детали опираются на раму 1, а рама 2, перемещаясь по нижней В полуокружности дуги, возвращается в исходное положение.
Положительный эффект от применения изобретения достигается за счет упрощения конструкции привода рамы и повышения надежности работы при шаговом перемещении груза по неподвижной раме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1982 |
|
SU1051003A2 |
| Шагающий конвейер-накопитель | 1982 |
|
SU1076380A1 |
| Холодильник прокатного стана | 1983 |
|
SU1122390A1 |
| Устройство для открывания крышек колодцев | 1981 |
|
SU1015225A1 |
| Шагающий конвейер | 1983 |
|
SU1183434A1 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Шагающий конвейер | 1977 |
|
SU716920A1 |
| Шагающий конвейер | 1990 |
|
SU1757971A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU239852A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
ШАГАЮЩИЙ КОНВЕЙЕР, содержащий неподвижную раму, шарнирно закрепленные на ней двуплечие рычаги, одно из плеч каждого нз которых на конце имеет ролнк, а свободные от роликов плечи рычагов связаны тягой, установленную с возможностью возвратно-поступательного перемещения на роликах двуплечих рычагов подвижную раму и привод подъема и п ремещения подвижной рамы, отличающийся тем, что, с целью упрощения конструкции конвейера, привод выполнен в виде эксцентрикового вала с жестко закрепленной на нем серьгой, щарнирно связанной с одним из плеч двуплечих рычагов, и выполненного в подвижной раме вертикального паза, в котором размещен эксцентриковый вал. (Л ю ю 00 со 4ib
Id
HI
Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вейсман В | |||
| Ф | |||
| Шагающие конвейеры | |||
| М., «Машиностроение, 1976, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
