Изобретение относится к области транспортирующих устройств, в частности к шагающим конвейерам, применяемым в различных отраслях.
Известны технические решения, содержащие неподвижную раму-носитель, установленную на кривошипно-шатунном механизме, в которой шатуны шарнирно связаны с кривошипом и подвижной рамой и опираются на оси роликов, а также приводы подъема и перемещения подвижной рамы. Подвижная рама совершает подъем на некоторую высоту для отрыва перемещаемого груза от неподвижной рамы опоры, и достаточную для переноса его по горизонтали. При транспортировании негабаритного груза требуется подъем подвижной рамы на большую высоту. В этом случае перемещаемая по горизонтали подвижная рама, установленная на роликах, может опрокидываться под действием груза на концах рамы (консолях). Кроме этого, силовой цилиндр перемещения подвижной рамы, шарнирно закрепленный основанием на неподвижной раме и штоком с подвижной рамой, будет совершать угловые (маятниковые) движения. При работе цилиндра возникают тангенциальные усилия, стремящиеся приподнять или опустить подвижную раму. Создаются перекосы, что ведет к нестабильности работы.
s
00
ел
В известном устройстве подвижная рама установлена на роликах, шарнирно закрепленных на неподвижной раме и связанных с приводом подъема подвижной рамы, а каждый ролик закреплен на неподвижной раме -посредством жестко соединенных между собой эксцентриковых втулок. Привод подъема кинематически связан с одной из эксцентриковых втулок. Этому устройству присущи те же недостатки, что и у вышеприведенных устройствах. Кроме того, усложнен механизм перемещения подвижной рамы,.состоящий из привода, кинематически связанного с роликом. Это создает неудобства в эксплуатации, т.к. оба привода электрически связаны между собой посредством системы управления скоростью.
Наиболее близким техническим решением является конструкция шагового конвейера, содержащего неподвижную и подвижные рамы, последняя из которых установлена на роликах, кинематически связанных с механизмом перемещения подвижной рамы, при этом каждый механизм подъема и перемещения подвижной рамы выполнен в виде силового цилиндра, жестко закрепленного на неподвижной раме, при этом шток цилиндра подъема связан с парой копиров, имеющих наклонные пазы, соединенных между собой тягой е возможностью возвратно-поступательного перемещения- в плоскости грузов, причем ролики взаимодействуют с наклонным пазом копира, при этом имеются пары роликов, перемещающиеся по направляющей. Однако данная конструкция не обеспечивает регулировку высоты подъема подвижной рамы.
Целью, изобретения является расширение технологических возможностей конвейера путем обеспечения регулировки высоты подъема подвижной рамы.
Поставленная цель достигается за счет того, что в шаговом конвейере, содержащем установленную с возможностью возвратно- прступательного перемещения по неподвижной раме подвижную раму, привод продольного перемещения подвижной рамы и механизм ее вертикального перемещения, включающий два установленных с возможностью возвратно-поступательного перемещения по неподвижной раме вдоль направления транспортирования и жестко связанных между собой копира с наклонными пазами, расположенные в наклонных пазах копира опорные ролики и связанный с копирами силовой цилиндр, механизм, вертикального перемещения подвижной рамы выполнен с двумя вертикально установленными толкателями с расположенными попарно в вертикальной плоскости несущими роликами на их верхних концах, установленным с возможностью перемещения и фиксации на неподвижной раме упором и
закрепленными на неподвижной раме двумя втулками с вертикальными отверстиями для размещения толкателей, при этом подвижная рама выполнена с расположенными между несущими роликами каждой пары
продольными направляющими, а опорные ролики установлены на нижних концах толкателей. Кроме того, подвижная рама выполнена с вертикальной направляющей, а привод ее продольного перемещения вы5. полнен в виде силового цилиндра с установленной на конце его штока парой . расположенных в горизонтальной плоскости упорных роликов, установленных с возможностью возвратно-поступательного
0 перемещения по вертикальной направляющей.
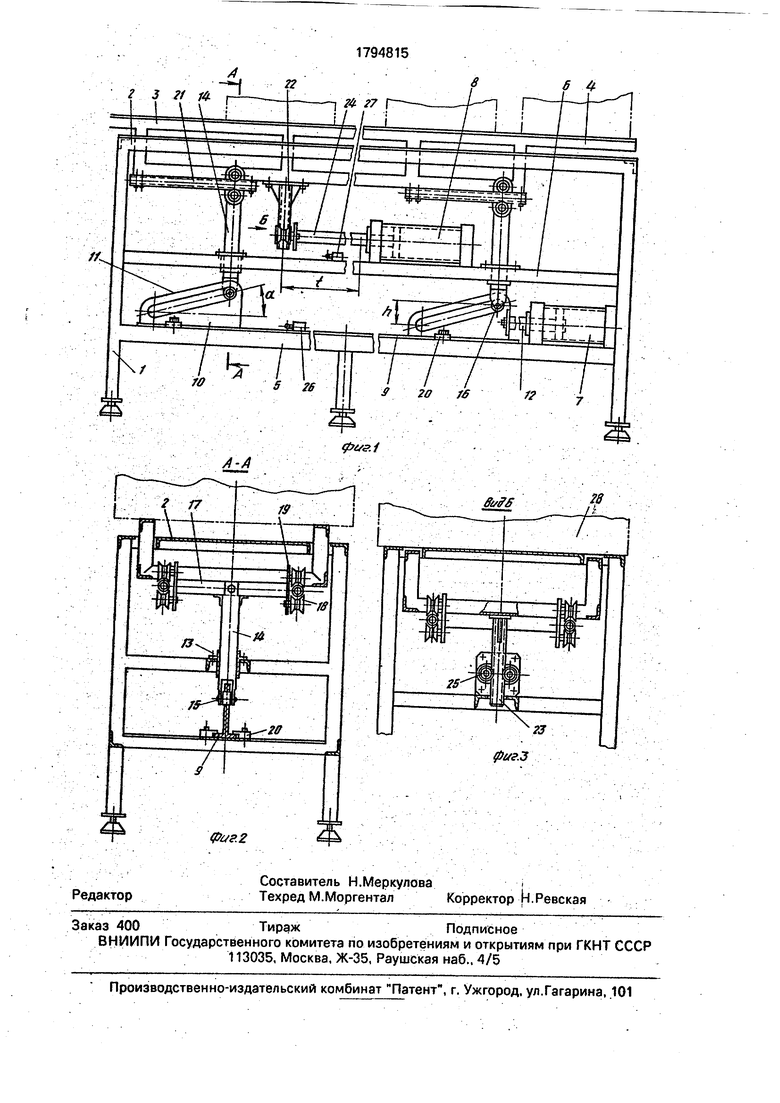
На фиг. 1 показан общий вид устройства; на фиг. 2-механизм подъема; на фиг. 3 - механизм перемещения,
5. Шаговый конвейер (фиг. 1, 2) состоит из неподвижной рамы 1, которая имеет ложементы 2, между которыми смонтирована подвижная рама 3, выполненная П-образнойи имеющая консоли 4. Последние служат для
0 загрузки конвейера. В неподвижной раме 1 закреплены продольные балки 5 И 6 для установки силовых цилиндров подъема 7 и перемещения 8, На балке 5 смонтирована тяга 9, жестко соединяющая пару копиров
5 10с наклонным пазом 11, имеющих возможность возвратно-поступательного движения посредством штока 12 от цилиндра 7, а на балке 6 закреплены во втулках 13 с вертикальными отверстиями для размещения
0 толкателей 14 (фиг. 2). На нижних концах толкателей 14 установлены на осях 15 опорные ролики 16, посредством которых через траверсы 17 и пары несущих роликов 18, смонтированных на щечках 19, подвижная
5 рама 3 может совершать подъем и опускание. Тяга 9 с жестко закрепленными на ней копирами 10 установлена в горизонтальных направляющих 20 (фиг, 1,2).
Подвижная рама 3 имеет направляю0 щие 21, выполненные в виде труб, размещенных между парами несущих роликов 18, и кронштейна 22 с вертикальной направляющей 23, а на штоке 24 цилиндра перемещения 8 размещена пара роликов 25, по
5 конструкции аналогичных роликам 18 и позволяющих подвижной раме 3 совершать возвратно-поступательные движения в вертикальной плоскости. На неподвижной раме 1 установлены позиционирующие упоры 26 и 27 для управления работой транспортиревания грузов, и регулирования высоты подъема и перемещения их.
Работа конвейера заключается в следующем. В начальный момент подвижная рама 3 находится в нижнем и в крайнем правом положении. Консоль 4 находится под грузом 28. Включается механизм подъема подвижной рамы. Шток 12 силового цилиндра 7 перемещает копиры 10 влево. Опорные ролики 16, двигаясь по наклонному пазу 11, перемещают толкатели 14 и траверсы 17 вверх на высоту h. Рама 3 при подъеме захватывает груз со стола (на чертеже не показано) консолью и приподнимает его. Включается силовой цилиндр перемещения 8, шток 24 через пары упор- ных роликов 25 и кронштейн 22 перемещает раму 3 влево вверху на шаг t. Включается реверс цилиндра 7, происходит опускание
подвижной рамы. Груз фиксируется на лот жементах 2 (фиг. 3), а с помощью реверса цилиндра 8 подвижная рама 3 возвращается внизу в исходное положение. Высота подъема подвижной рамы может регулироваться упором 26, а шаг перемещения груза t упором 27... ;.
Конструкция механизма перемещения и подъема подвижной рамы со де ржит пары роликов, между которыми размещены направляющие. Это предотвращает опроки- дывание рамы ;в момент, когда груз находится на консолях, исключает переко- сы. Использование копиров с наклонным пазом позволяет уменьшить усилие на силовом цилиндре подъема на величину, обрат- .но пропорциональную углу наклона а. ;
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| УСТРОЙСТВО ШАГОВОЙ ТРАНСПОРТИРОВКИ | 1993 |
|
RU2071443C1 |
| Шаговый конвейер для перемещения труб | 1991 |
|
SU1838218A3 |
| Шаговый конвейер | 1980 |
|
SU882863A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| Шаговый конвейер | 1984 |
|
SU1181958A1 |
| Шаговый конвейер | 1979 |
|
SU867799A1 |
| Шаговый конвейер | 1986 |
|
SU1350083A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
Использование: предложенное решение относится к транспортирующим устройствам, в частности конвейерам циклического типа. Сущность изобретения: шаговый конвейер содержит установленную с возможностью возвратно-поступательного перемещения по неподвижной раме подвижную раму, привод продольного перемещения подвижной рамы и механизм ее вертикального перемещения. Механизм вертикального перемещения подвижной рамы, включающий два установленных с возможностью возвратно-поступательного перемещения по неподвижной раме вдоль направления транспортирования и жестко связанных между собой копира с наклонными пазами, выполнен с двумя вертикально установленными толкателями, Несущие ролики расположены попарно в вертикальной плоскости на верхних концах толкателей. На неподвижной раме закреплены две втулки с вертикальными отверстиями для размещения толкателей. Подвижная рама выполнена с расположенными между несущими роликами каждой пары продольными направляющими. Опорные ролики установлены на нижних концах толкателей. 1 з.п, ф-лы, 3 ил.
Форм у л а и з о б р е т е н и я 1. Шаговый конвейер, содержащий установленную с возможностью возвратно- поступательного перемещения по неподвижной раме подвижную раму, привод продольного перемещения подвижной рамы и механизм ее вертикального перемещения, включающий два установленных с возможностью возвратно-поступательного перемещения по неподвижной раме вдоль направления транспортирования и жестко связанных между собой копира с наклонными пазами, расположенные в наклонных пазах копира опорные ролики и связанный с копирами силовой цилиндр, о т л и ч а ю - щ и и с я тем/что, с целью расширения технологических возможностей конвейера путем обеспечения регулировки высоты подъема подвижной рамы, механизм верти-- кального перемещения подвижной рамы .выполнен с двумя вертикально установленными толкателями с расположенными попарно в вертикальной плоскости несущими роликами на их верхних концах, установленным с возможностью перемещения и фиксации на неподвижной раме упором и закреплёнными на неподвижной раме двумя втулками с вертикальными отверстиями для размещения толкателей, при этом подвижная рама выполнена с расположенными между несущими роликами каждой пары продольными направляющими, а опорные ролики установлены на нижних концах толкателей.
| Шаговый конвейер | 1979 |
|
SU863484A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шагающий конвейер | 1989 |
|
SU1676949A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
