3. Кран по п. 1, отличающийся тем, что каждый блок ограничения сигнала управления приводами поворота, изменения вылета стрелы и подъема груза выполнен с двумя дифференциальными усилителями, примем инвертирующий вход первого соединен с выходом одного из командоаппаратов, а выход с блока управ- ления соответствующего привода и инвертирующим входом второго усилителя, выход которого соединен с инвертирующим входом первого усилителя через диод, а неинвертирующий вход второго усилителя подключен к входу блока выделения разности допустимого и текущего значений углов крена.
k. Кран по п. 1, о т.л и ч. а ю-. щ и и с я тем, что компараторвключения насосов снабжен реле,замыкающий контакт которого включен параллель,но резистору установки компартора.
5. Кран по пп. 1 и 2, о т л ичающийся тем, что блок выделения модуля сигнала выполнен с двумя дифференциальнымиусилителями с диодами в обратной связи, примем выходы этих усилителей соединены между собой.6. Кран по п. 1, о т л и ч а. ющ и и с я тем, что задатчик допустимого угла крена выполнен с операционным усилителем с диодом в обратной связи, резистором устайовки трчки перегиба, сумматором и резистором установки уровня начального умает-. ка, причем первый вход операционного усилителя подключен к выходу блока определения нагрузки на гаке стрелы, а второй - к резистору установки перегиба, выход операционного усилители соединен с первым входом сумматора,- второй вход которого подключен к резистору установки уровня начального участка, а выход - к второму входу блока выделения сигнала разности допустимого и текущего углов крена. .


| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучий кран | 1981 |
|
SU981194A2 |
| Плавучий кран | 1977 |
|
SU719085A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
| Устройство для управления перемещением груза плавучего крана | 1980 |
|
SU927732A1 |
| Ограничитель грузоподъемности стрелового крана | 1983 |
|
SU1174370A1 |
| Ограничитель грузоподъемности стрелового крана | 1981 |
|
SU992407A1 |
| Ограничитель грузоподъемности стрелового крана | 1986 |
|
SU1390178A1 |
| Плавучий кран | 1989 |
|
SU1611783A1 |
| Ограничитель грузоподъемности стрелового крана | 1980 |
|
SU992406A1 |


1
Изобретение относится к строительтву плавучих кранов и касается контруирования их противокреновых сие-ем. .
Известен плавучий кран, содержащий понтон с противокреновой системой, включающей связанные между собой уравнительные цистерны, насосы И реле правого и левого бортов, связанные с датчиком угла крена, компараторами включения этих реле и задатчиком допустимого угла крена, приводы поворота, изменения вылета стрелы и подъема груза, соединенные через бло-; ки управления, имеющие аварийные вхо ды, с командоаппаратами этих приводов- lj.
Однако известный плавучий кран недостаточно надежен и безопасен s, эксплуатации, так как в его протизокреновой системе не учитывается при задании допустимого угла крена за : грузка крана, отсутствует контроль за датчиками крена и сложна реализация схемы по выбору минимального сигнала на ее входах.
i Цель изобретения - повышение надежности и безопасности эксплуата.ции плавучего крана,
Цель достигается тем, что плаву5 мий кран снабжен компаратором предельного угла крена, вторым датчиком угла крена, блоком контроля исправмостй датчиков угла крена, соединенным с входами этих датчиков угла креfO на, тремя блоками ограничения сйгна лов управления приводами поворота, изменения вылета стрелы и подъема груза, двумя блоками выделения наибольшего сигнала датчиков угла крена, блоком выделения модуля сигнала -датчиков угла крена, блоком выделения сигнала разности допустимого и текущего значений углов крена и блоком определений нагрузки на гаке
20 стрелы, причем входы блоков выделения наибольшего сигнала датчиков угла крена соединены с выходами датчиков угла крена, а выходы - с входами блока выделения модуля сигнала датчиков угла крена и с входами соответствующих компараторов включения реле
насосов левого и правого бортов, входы блока выделения сигнала разности допустимого и текущего-значений углов крена соединены с входом, блока выделения модуля сигнала датчиков уг- 5 ла крена и выходом задатчика допустимого угла крена, а выходы блока выделения сигнала - с первыми входами блоков ограничения сигналов управления приводами поворота, изменения вылета стрелы и подъема груза, второй вход которых соединен с выходами командоаппаратов приводов поворота, . изменения вылета стрелы и подъема груза, а выход блоков ограничения - с блоками управления этих приводов, аварийные входы которых соединены с выходом компаратора предельного угла крена.
Кроме того, каждый блок 4 онтроля W исправности датчиков угла крена выполнен с дифференциальным усилителем, блоком выделения модуля сигнала, компаратором и индикатором неисправности датчиков угла крена, причем входы 25 дифференциального усилителя соединены с выходами датчиков угла кренаi а выходы этого усилителя через блок выделения модуля си гнала - с входом компаратора, выход которого подклю- 30 чен к индикатору неисправности датчиков угла крена.
Каждый блок ограничения сигнала управления приводами поворота, изменения вылета стрелы и подъема груза 3S выполнен с двумя дифференциальными усилителями, причем инвертирующий вход первого соединен с выходом одного из командоаппаратов, а выход с блоком-управления соответствующе- 4 го привода и инвертирующим входом второго усилителя, выход которого соединен с инвертирующим входом пер вого усилителя через диод, а нёинвертирующий вход второго усилителя « подключен к входу блока выделения разности допустимого и текущего значений углов крена.
Компаратор включения насосов снабжен реле, замыкающий контакт которо- so го включен параллельно резистору установки компаратора. ,
Блок выделения модуля сигнала выполнен с двумя дифференциальными 5$ усилителями с диодами в обратной сея-. зи, причем выходы этих усилителей соединены между собой.
Задатчик допустимого угла крена выполнен с операционным усилителем с диодом в обратной связи, резисторо установки точки перегиба, сумматором и резистором установки уровня начального участка, причем первый вход операционного усилителя подключен к выходу блока определения нагрузки на гаке стрелы, а второй - к резистору установки точки перегиба, выход операционного усилителя соединен с первым входом сумматора, второй вход которого подключен к.резистору установки уровня начального участка, а выход - к второму входу блока выделения сигнала разности допустимого и текущего углов крена.
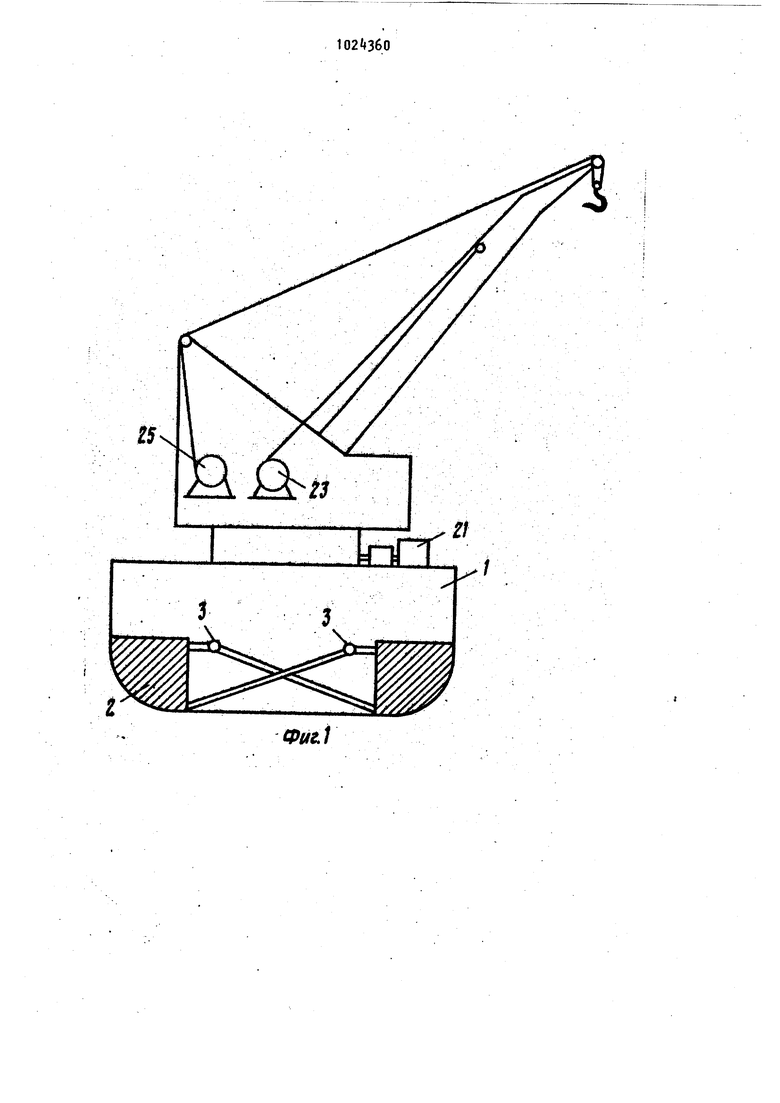
На фиг. 1 схематично изображен кран, общий вид; на фиг. 2 - функциональная схема противокреновой системы плавучего крана; на фиг. 3 - схема блока ограничения сигнала управления приводами поворота, изменения вылета стрелы и подъема груза; на фиг, А - схема компаратора включения насосов; на фиг. 5 - схема блока выделения модуля сигнала; на фиг. 6 график зависимости допустимого угла крена от величины груза на гаке стрелы крана; на фиг. 7 - схема задатчика допустимого угла крена..
Плавучий кран содержит понтон 1 с противокреновой системой, включающий в себя уравнительные цистерны 2 и насосы 3 первого и левого бо1этов, два датчика и 5 угла крена, состоящих из кренометров 6 и дифференциальных усилителей 7i выходы которых соединены с входами блока 8 контроля исправности датчиков угла крена и блоков 9 и 10 выделения наибольшего сигнала датчиков угла крена. Выходы блоков 9 и 10 соединены через компараторы 11 и 12 с реле 13 и И включения насосов 3 правого и левого бортов ис входами блока 15 выделения модуля сигнала датчиков угла крена, выхо которого соединен с первым входом блока 16 выделения сигнала разности допустимого.и текущего значений углов крена крана, а второй вход блоka 16 соединен через зэдатчик 17 допустимого угла крена с выходом блока 18 определения нагрузки на гаке стрелы.
На пульте 19 управления краном расположены командоаппарат 20 привода 21 поворота стрелы, командоаппа5par 22 привода .23 изменения вылета стрелы, комаидоаппарат 2 привода 25 подъема груза, выходы которых со динены с первыми входами соответствующих блоков 26 ограничения уровня сигналов управления этими приводами вторые входы этих блоков соединены с выходом блока 16 выделения разнос ти допустимого и текущего значений углов крена. Выход блока 16 соединен также с входом компаратора 27 предельного угла крена, выход которо го .соединен с индикатором 28 предел ного угла крена и с входами аварийной остановки блоков 29 управления приводами крана, выходы которых сое динены с приводами 21, 23 и 25 поворота, изменения вылета стрелы и подъ ема груза, а входы - с выходами соответствующих блоков 2б ограничения уровня сигналов управления приводами. Блок 8 контроля исправности датчиков угла крена содержит дифференциальный усилитель 30, входы которого соединены с выходами датчиков и 5 угла крена, а выход подключен к входам блока 31 выделения модуля. Первый вход компаратора 32 соединен с выходом блока 31, а на второй вход подано напряжение уровня срабатывания, выход компаратора подключен к индикатору 33 неисправности датчиков Ц и 5 угла крена. Блок 2б ограничит;еля уровня сигна ла управления содержит дифференциаль ный усилитель . 3, инвертирующий вхо которого через резистор 35 соединен с выходом соответствующего командоаппарата, а выход - с входом блока управления приводом и инвертирующим входом дифференциального усилителя Зб, выход которого через диод 37 под ключен к неинвертирующему входу усилителя 3. Неинвертирующий вход усилителя 36 подключен к выходу блока 16 выделения разности допустимого и текущего значений углов крена. Резистор 38 является резистором обратной связи, конденсатор 39 служит для подавления возможных колебаний. Компаратор 11(12) включения реле насосов левого или правого бортов выполнен на базе дифференциального усилителя 0, первый вход которого соединен с выходом соответствующего блока выделения наибольшего сигнала угла крена, второй вход - с движком потенциометра ч1 установки уровни 60 срабатывания. Выход усилителя fO соег динен с базой транзистора 42, в цепи коллектора которого включена обмотка реле (3, контакт реле 43 включен параллельно движку потенциометра 41, а контакт 45 соединен с корпусом и реле включения насоса. Блок 15(31) выделения модуля си|- нала датчиков угла крена содержит два дифференциальных усилителя 46 и 47 с диодами и резисторами в обратной связи, выходы.усилителей соединены между собой через диоды 48 и подключены к инвертирующему входу дифференциального усилителя 46 и к неиноертирующему входу усилителя 47. Задатчик 17.допустимого угла крена содержит операционный усилитель 48, .в обратной связи которого вклю{4ен диод 49, вход усилителя соединен с блоком 18 определения нагрузки и резисторы 50 установки точки перегиба, выход усилителя 48 через диод 49 связан с первым входом сумматора 51 второй вход которого соединен с резистором 52 установки уровня на- ; чального участка, а выход подключен к второму входу блока 16 выделения сигнала разности допустимого и текущего значений углов крена, Величины резисторов 53-58 определяют масштаб обрабатываемых сигналов. Блок 29 управления приводами крана имеет вход 59 аварийной остановки, соединенный с выходом компаратора 27. Блок 26 имеет входы 60 и 61 и выход 62. Плавучий кран работает следующим образом. В исходном состоянии понтон 1 крана находится на ровном киле, уравнительные цистерны 2 заполнены примерно наполовину, а сигнал с датчиков 4 и 5 угла крена отсутствует. С задатчика 17 поступает сигнал, пропорциональный максимально допустимому углу крена.. Поскольку этот сигнал по абсолютной величине больше величины максимальных сигналов управления ot командоаппаратов 20, 22 и 24, то сигналы от них проходят на блоки 29 управления без ограничения. При Подъеме груза в положении стрелы, например, на правый борт понтон 1 крана начинает крениться, на выходе датчиков 4 и 5 угла крена появляется сигнал ( при крене на правый борт сигнал положительной полярности, при крене на левый борт - отрица71тельной). Так как сигналы с датчиков и 5 не могут, быть абсолютно одинаковыми по величине, то для обеспечения большей безопасности блок 9 выделения наибольшего сигнала пропускает сигнал, больший по величине, на вход компаратора 11 включения реле/ 13 насоса 3 левого борта. При дост14жении сигналом от датчика уровня, установленного резистором , компаратор 11 срабатывает и включает контактом 5 реле левого насоса. Насос начинает перекачивать балласт в цистерну левого борта. Поскольку контакт kk шунтирует установку напряжения на резисторе 1 , насос будет перекачивать балласт до тех пор, пока крен не станет равен нулю, и только тогда компаратор 11 подаст сигнал на остановку насоса. При возникновении крена понтона разность между допустимым и текущим значениями угла крена для данной мае сы грузауменьшается. Напряжение с выхода блока 16 выделения разности становится меньше, максимальных сигналов командоаппаратов и ограничивает их абсолютную величину своим уровнем, при этом автоматически уменьшаются скорости любого из трех работающих приводов, в данном случае привода 25 подъема гру за. Если насос не успевает компенсировать крен и разность допустимого и. текущего значений углов крена продолжает уменьшаться, автоматически уменьшается и скорость работающего привода. Когда крендостигает предельного значения и разность будет равна нулю, сработает компаратор 27 предельного крена и подаст сигнал на запрещение работы всех трех приводов и на индикатор 28 Предельный крен. При крене на левый борт работает блок 10 выделения наибольшего сигнала (отрицательного) крена от датчиков и компаратор 12 реле Il включения насосов правого борта. При этом ограничение сигналов управления ко0мандоаппаратов приводов поворота изменения вылета стрелы и подъема груза происходит аналогично. Сигнал на выходе задатчика 17 допустимого угла уменьшается в соответствии с увеличением усилия на гаке. Работа блока 15 выделения модуля сигнала и задатчика -17 допустимого угла крена поясняется приведенными схемами. Блок 2б ограничения сигнала управления работает следующим образом. Сигнал от командоаппарата поступает на вход 60. Так как коэффициент передачи усилителя 3 выбирается обы.чно равным единице, то сигнал на выход б2 проходит без изменения и поступает на вход блока 29 управления соответствующего привода. На вход 61 блока 26 подается напряжение разности допустимого и текущего углов крена с выхода блока 1б. Если напряжение управления от командоаппарата превышает уровень напряжения разности допустимого и текущего углов крена, то на выходе усилителя 36 изменяется полярность, диод 37 начинает проводить ток, и образо-. вавшаяся обратная связь стабилизирует выходное напряжение на уровне напряжения разности. Блок 8 контроля датчиков крена срабатывает в том случае, если разность сигналов.датчиков и 5 угла крена достигает величины, больше до-, пустимой. При этом срабатывает компаратор 32, и зажигается индикатор. 33 Неисправность датчиков. Блок 31 выделения модуля сигнала выделяет модуль из разнополярного напряжения на выходе усилителя 30. Изобретение позволяет увеличить грузоподъемность плавучего крана без увеличения понтона, повысить безопасность при работе крана с предельными грузами и улучшить условия работы крановщика.
Фиг.1
fpt/et.
Фиг. 5
500 etc.
Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Плавучий кран | 1977 |
|
SU719085A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
