(54) УСТГОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ГРУЗА
1
Изобретение относится к нодъемно-транс- , нортному машиностроению, а именно к устройствам для горизонтального перемещения груза, и может быть использовано на плавучих кранах для управления перемещением груза.
Известно устройство для управления перемещением груза плавучего крана, содержащее комаидоаппарат грузовой лебедки и командоагшарат изменения вылета стрелы, соединенный с входом регулятора двигателя механизма изменения вылета стрелы, а также переключатель изменения вылета стрелы, замыкающий ключ которого подсоединен к выходу сумматора и к входу регулятора двигателя механизма грузовой лебедки, н датчик вылета стрелы 1 .
Недостатком известного устройства является сравнительно низкое качество перемещения груза.
Цель изобретения - расширение эксплуатационных возможностей плавучего крана путем обеспечения перемещения груза в горизонтальной плоскости. ПЛАВУЧЕГО КРАНА
Указанная цель достигается тем, что устройство снабжено датчиком крена плавучего крана и переключателем перемещения груза вне контура понтона крана, замыкающий ключ которого соединен с выходом датчика крена плавучего крана и первым входом сумматора, блоком перемножения сигналов, первый вход которого подключен к выходу датчика вылета стрелы, а выход подключен к второму входу сумматора, и датчиком
to скорости изменения вьшета стрелы, выход которого подсоединен к второму входу блока перемножения сигналов, а переключатель изменения вылета стрелы выполнен с размыкающим ключом, соединенным с выходом коtsмандоаппарата грузовой лебедки и входом регулятора двигателя механизма грузовой лебедки.
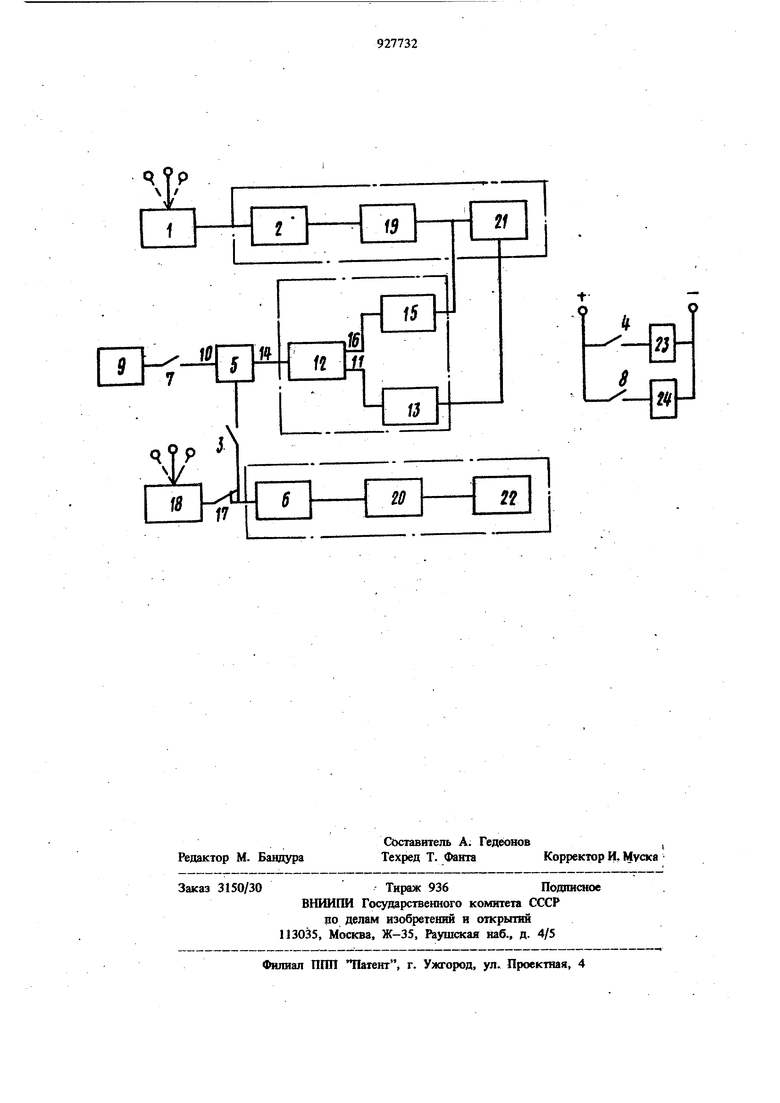
На чертеже изображена функциональная схема устройства для управления перемеще20нием груза плавучего крана.
Устройство для управления перемещением груза плавучего крана содержит командоаппарат 1 изменения вылета стрелы, соединен39
ный с входом регулятора 2 двигателя механизма измене1шя вылета стрелы. Замыкаю1ЩШ ключ 3 переключателя 4 изменения вылета стрелы подсоединен к выходу сумматора 5 и к входу регулятора б двигателя . механизма грузовой лебедки. Замыкающий ключ 7 переключателя 8 перемещения груза вне контура понтона крана соединен с выходом датчика 9 крена нлавучего крана и первым входом 10 сумматора 5. Первый
вход И блока 12 перемножения сигналов подключен к выходу датчика 13 вылета стрелы, а выход подключен к второму входу 14 сумматора. Выход датчика 15 скорости измене1гая вылета стрелы подсоещшен к второму входу 16 блока 12. Размыкающий ключ 17 переключателя 4 соединен с выходом командоапларата 18 Грузовой лебедки и входом регулятора 6. Устройство управляет двигателями 19 и 20, соединенными соответственно с меха1шзмом 21 изменения вылета стрлы и с механизмом 22 грузовой лебедки. Сигналы переключателей 4 и 8 повторяются реле 23 и 24, которым соответствуют контакты соответственно 3, 17 и 7.
Устройство для управления перемещением груза плавучего крана работает следующим образом.
Для получения режима перемещения груза на заданном расстоянии относительно палубы понтона крана при изменении вылета стрелы включают переключатель 4, нри этом ключи 7 и 17 разомкнуты, а ключ 3 замкнут. Датчик 15 выдает сигнал, пропорциональный скорости механизма 21. Датчик 13 выдает сигнал, пропорциональный вылету стрелы. Упомянутые сигналы перемножаются в блоке 12 и через сумматор 5 управляют регулятором
6даигателя 20, при этом механизм 22 изменяет длину вытравленного троса, поддерживая груз на заданном расстояЕШШ до палубы понтона.
Для получения режима горизонтального перемещения груза относительно поверхности воды или земли при изменении вылета стрелы и крена .понтона крана включают переклю чате ли 4 и 8, при зтом замкнуты ключи 3 и
7и разомкнут ключ 17. Теперь сигнал на выходе сумматора 5 пропорционален не сигналу блока 12, как в предыдущем случае, а пропорционален сумме сигналов датчика 9 крена и блока 12, тем самым в результате Механизм 22 изменяет длину вытравленного троса в зависимости как от изменения вылета стрелы, так и от крена понтона крана.
Устройство для управления перемещением груза плавучего крана позволяет сравнительно точно перемещать груз на заданном расстоянии как от палубы понтона крана, так и относительно воды или земли.
Формула изобретения
Устройство для управления перемещением груза плавучего крана, содержащее командоашшрат грузовой лебедки и командоаппарат изменения вылета стрелы, соединенный с входом регулятора двигателя механизма изменения вылета стрелы, а также переключатель изменения вьшета стрелы, замыкающий ключ которого подсоединен к выходу сумматора и к входу регулятора двигателя механизма грузовой лебедки, и датчик вылета стрелы, отличающееся тем, что, с целью расширения эксплуатационных возможностей плавучего крана путем обеспечения перемщения груза в горизонтальной плоскости, оно снабжено датчиком крена плавучего крана и переключателем перемещения груза вне контура понтона крана, замыкающий ключ которого соединен с выходом датчика крена плавучего крана и первым входом сумматора, блоком перемножения сигналов, первый вход которого подключен к выходу датчика вьшета стрелы, а выход подключен к второму входу сумматора, и датчиком скорости изменения вьшета стрелы, выход которого подсоединен к второму входу блока перемножения сигналов, а переключатель изменения вьшета стрелы вьшолиен с размыкающим ключом, соединенным с выходом командоалнарата грузовой лебедки и входом регулятора двигателя механизма грузовой лебедки.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2684387/29-11, кл. В 66 С 23/12, 13.11.79 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Балластная система плавучего крана | 1986 |
|
SU1414707A1 |
| Плавучий кран | 1982 |
|
SU1024360A1 |
| Грузоподьемный кран | 1970 |
|
SU502833A1 |
| Плавучий кран | 1977 |
|
SU719085A1 |
| Плавучий кран | 1981 |
|
SU981194A2 |
| Ограничитель грузоподъемности стрелового крана | 1987 |
|
SU1428685A1 |
| Ограничитель грузоподъемности стрелового крана | 1983 |
|
SU1174370A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| Устройство для перевода стрелы крана в транспортное положение | 1990 |
|
SU1791344A1 |
| Ограничитель грузоподъемности стрелового плавучего крана | 1988 |
|
SU1601081A1 |