2, Устройство для определения Дисбаланса ротора, содержащее датчик дисбаланса, блок регистрации, вход которого связан с датчиком дисбаланса, и датчик угла поворота, выход которого связан с вторым входом блока регистрации, отличающееся тем, что блок регистрации выполнен в виде последовательно соединенных/интегратора блока памяти, сумматора, комму тат о|за, двух параллельно включенных между собой промежуточных блоков памяге, делителя и блока вычисления параметров дисбаланса второй вход коммутатора соедини с выходом датчика угаа поворота и с входом датчика дисбаланса.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения параметров дисбаланса | 1990 |
|
SU1795318A1 |
| Способ определения дисбаланса роторов и устройство для его осуществления | 1988 |
|
SU1552023A1 |
| Способ определения дисбаланса роторови уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800753A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU879342A1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Устройство для определения дисбаланса | 1981 |
|
SU1045035A1 |
| Устройство для определения параметров вектора дисбаланса | 1984 |
|
SU1245902A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1043498A1 |
1. Способ определения дисбаланса ротора, заключакяцийся в том, что на двух различных частотах вращения ротора измеряют сигнал от его радиального перемещения и по полученным данным определяют дисбаланс, отличающийся тем, что, с целью повьпиения точности определения дисбаланса, на каждой частоте вращения сигнал фиксируют в течение одного полуоборота ротора дважды, со сдвигом на QO, (Л ю N Ч 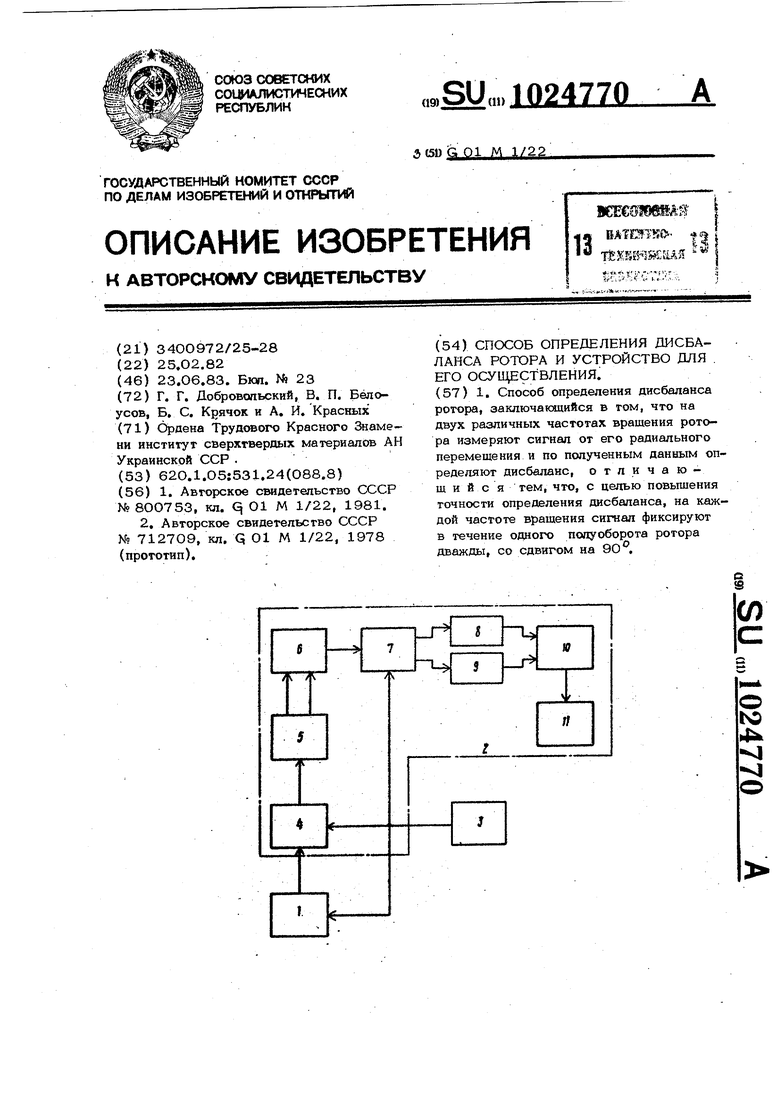
Изобретение относится к балансировоч ной технике и может быть использовано при балансировке роторов, в частности, прецизионных станков. Известен способ определения дисба- ланса роторов, заключаклцийся в том, что по окружности ротора наносят ряд равномерно расположенных меток, записывают в точках расположения меток некругл ость ротора, затем ее значение вычитают из сигнала колебаний поверхности 1. Известно устройство для осуществления способа.содержащее .датчик дисбаланса, последовательно соединенные с ним блок регистрации, блок синхронизации и блок компенсации ll , Недостатком известных способа и устройства является ограниченная точность определения дисбаланса, обусловленная тем, что некруглость ротора учитывается в виде отдельных значений, замеренных в местах расположения меток. Наиболее близким к изобретению по тех нической сущности является способ опреде ления дисбаланса роторов, заключающийся в том, что на двух различных частотах враиюния ротора измеряют сигнал от его радиального перемещения и по полученным данным спределяют дисбаланс j . Способ реализуется устройством для определения -дисбаланса ротора, содержащим датчик дисбаланса, блок регистрации выполненный в виде индикатора сигнала, вход когоротчз связан с датчиком дисбаланса, в датчик угла поворота, выход которого cBSQaH с вторым входом блока ре гистрации 2. В качестве одной яа частот вращения ротора в известном способе выбирают та кую частоту, на которой сигнал от радиального перемещения поверхности даределяется только ее некруглостью. Недостатком известных способа и устройства является ограниченная точность определения дисбаланса, связанная с тем что некруглость ротора компенсируется сигналом синусоидальной формы, что позволяет учесть только первую ее гармсшику. Кроме того, при балансировке роторов прецизионных станков не всегда возможно их вращение на частоте, когда сигнал от радиального перемещения поверзшостя определяется только ее кекруглостъю. Целью изобретения является повьпиение точности определения дисбаланса ротора. Поставленная цель достигается тем, что согласно способу определения дисбаланса ротора заключающемуся в том, что на двух различных частотах вращения ротора измеряют сигнал от его радиального перемещения и по полученным данным определяют дисбаланс, на каждой частоте вращения сигнал фиксируют в течение одного полуоборота ротора дважды, со сдвигом на ЭО. В устройстве для определения дисбаланса ротора, содержащем датчик дисбаланса, блок регистрации, вход которого связан с датчиком дисбаланса, и датчик угла поворота, выход которого связан с вторым входом блока регистрации, блок регистрации ш тапнен в виде последовательно соединенных интегратора, блока памяти, сумматора, коммутатсфа, двух параллельно включенных между собЫ) промежуточных блоков пaмятИi делителя и блока вычисления параметров дисбаланса, второй вход коммутатора соединен с выходом датчика угла поворота и с входом датчика дисбаланса. На чертеже изображена фогикшонапь ная схема устр Лства. Устройство содержит датчик 1 дисбаланса, блок 2 регистрации, вход которого связан с датчиком 1 дисбапансй, датчик 3 угла поворота, выход которого связан с вторым входом блока 2 регистрации, выполненного в виде последовательно сое диненных интегратора 4, блока 5 памяти сумматора 6, коммутатора 7, двух парал лельно включенных между собой промежу точных блоков 8 и 9 памяти, делителя 10 и бл(жа 11 вычисления параметров дисбаланса, второй вход коммутатора 7 соединен с выходом датчика 3 угла пово рота и с вxoдcяvI датчика 1 дисбаланса. При реализации способа устройство работает следукшшм образам. На ротор наносится метка начала отсчета, и он приводится во вращение с частотой СО 4 при этом датчик 1 дисба ланса вырабатывает сигнал, пропорциональный радиальному смешению поверхности ротора, поступающий на интегратор . 4, Датчик 3 угла поворота вырабатывае импульсы, поступакшше на интегратор 4, коммутатор 7 и дatчик 1 дисбаланса, и являющиеся командами для начала и окон чания процессов 4 ксацив сигнала и ег интегрирования, продолжакшшхся в течение одного полуоборота ротора дважды, со сдвигом на 90 относительно начала отсчета, результаты заносятся в ячейки блока 5 памяти. Полученные при этом значения пропорциональны интегралам it 3,U)4-lici%wVd(f КTV ))}51п1(ц,5-)Зср оаV 2 гJ ci ldЦ .5/1 /V4 кfu inltf }cf ji -ca sin(4), Ti/Z(1/2 где in(wV соответствующая сигнала датчика, обусловленная некруглостью поверхности; ((j - ампли туда сое тавляюшей сигнала, обусловленная дис балансом ротора; 1 -коэффициент, пропорциональный дисбалансу ротора и его податливости. Лалее ротор разгоняется до частоты вращения W 2 и измерения повторяют, результаи заносятся в блоки 5 памяти. .После окончания процесса сумматор б попарно ш гчитает результаты, соответствующие различным частотам вращения, но с одинаковым мсяиентом начала фиксации и интегрирования относительно начала отсчета. Полученные при этом результаты пропорциональны значениям-й ,a),j-n,u)i-214(). COSф ..(a).CJ) Благодаря вычитанию в сумматоре 6 результатов, пропорциональных интегралу сигналов, составляющая сигнала, обусловленная некруглостью поверхности и постоянная на всех частотах вращения, уничтожается. Результаты, вычитания через коммута-. тор 7, управляемый сигнала1у1и датчика 3 угла поворота, заносятся в блоки 8 и 9 прс ле|жуточной памяти, откуда выбираются делителем 1О, Результат деления, пропорциональный тангенсу фазового угла дисбаланса, поступает в блок 11 вь1числения дисбаланса, вычисляющий фазовый угол Дисбаланса вычисляется по зна-; :чёнию t или Д, Таким образ« л, благодаря , что измерение сигналов от радиального смещения поверхности осуществляется на каждый из двух частот вращения дважды, со сдвигом на 9О , а блок регистр)адии устрс ства выполнен в-виде последовательно соединенных интегратора, блока памяти, сумматора, коммутатора, двух параллельно включенных между собой бпсжов промежуточной памяти, делителя и блока вычисления дисбаланса, повыщается точность определения дисбаланса за счет полнЫ) компенсации некруглости поверхности ротора и обеспечивается, возможность ceiределения дисбаланса на двух любых, несовпадающих частотах вращения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения дисбаланса роторови уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800753A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения прогиба ротора | 1978 |
|
SU712709A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
