(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения дисбаланса роторови уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800753A1 |
| Способ определения дисбаланса ротора и устройство для его осуществления | 1982 |
|
SU1024770A1 |
| Устройство для определения параметров вектора дисбаланса | 1984 |
|
SU1245902A1 |
| Измерительное устройство для балансировочного станка | 1976 |
|
SU557275A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Устройство для определения смещенияцЕНТРА ТяжЕСТи POTOPOB | 1978 |
|
SU800752A1 |
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Измерительное устройство к балансировочному станку | 1975 |
|
SU567980A1 |
Jlik
сд
о со
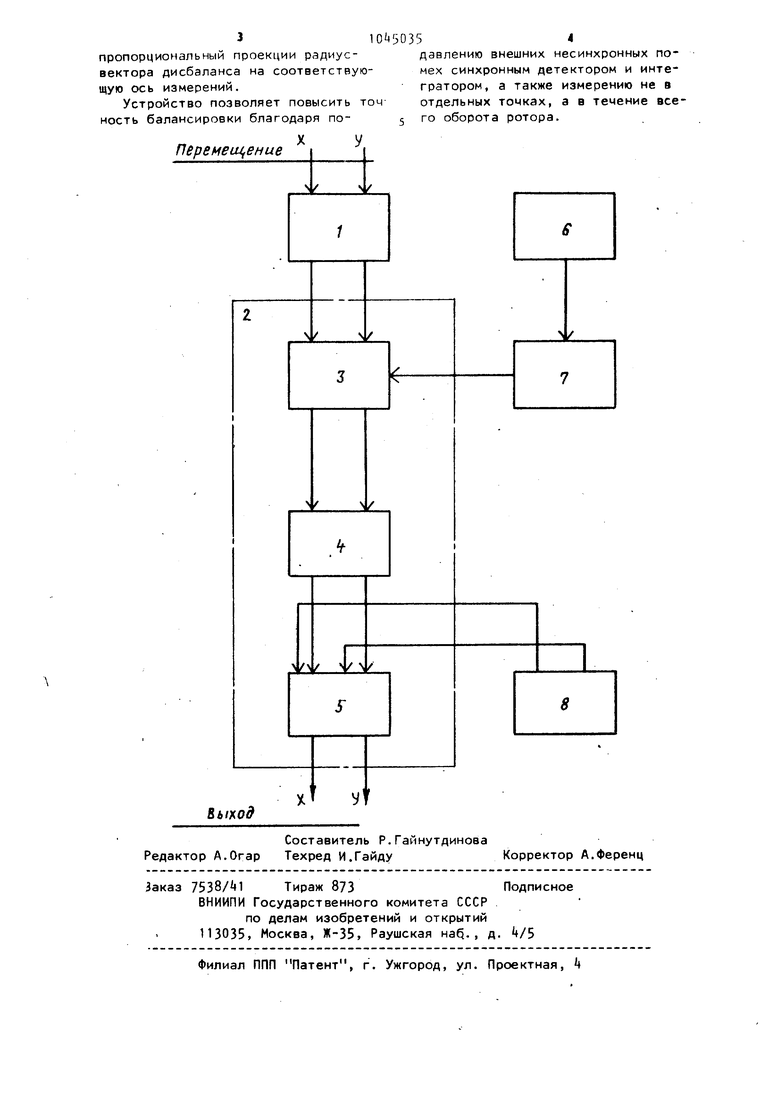
ел 1К Изобретение относится к измерительной технике и может быть исполь зовано для определения дисбаланса вращанэщихся тел, в частности для текущего контроля вибрации и определения дисбаланса шпинделей металлообрабатывающих станков. Известно устройство для определения дисбаланса, содержащее датчик дисбаланса, связанный с ним блок регистрации, последовательно соединенные датчик угла,блок синхронизации и блок компенсации, выход которого связан с вторым входом блока регист рации, третий вход которого соединен с вторым выходом блока синхронизации lj . Недостатком известного устройства является ограниченная точность определения дисбаланса, связанная с тем, что формируемый компенсирующий сигнал синусоидальной формы позволяет скомпенсировать только первую гармонику некруглости, не обеспечивая компенсацию влияния некруглости произвольной формы. Наиболее близким к предлагаемому является устройство для определения дисбаланса, содержащее датчик переме щения, датчик угла, связанный с ним блок синхронизации, блок компенсации и блок регистрации, входы которого связаны с выходами датчика перемеще нйя, блока синхронизации и блока ком пенсации. В устройстве блок регистра ции выполнен в виде генератора развертки и осциллографического индикатора 2 . Недостатком указанного устройства также является ограниченная точжхть определения дисбаланса, связанная с тем, что не обеспечивается защите измерений от внешних вибрационных помех и измерение осуществляется в отдельных точках. Цель изобретения - повышение точности балансировки. Поставленная цель достигается тем что в устройстве для определения дис баланса, содержащем датчик перемещения, датчик угла, связанный с ним блок синхронизации, блок компенсации и блок регистрации, входы которого связаны с выходами датчика перемещения , блока синхронизации и блока ком пенсации, блок регистрации выполнен в виде последовательно соединенных синхронного детектора, связанного с выходом блока синхронизации, интегра 52 тора и сумматора, связанного с выходами блока компенсации. На чертеже изображена блок-схема устройства для определения дисбаланса. Устройство содержит датчик 1 пере мещения, подключенный к входу блока 2 регистрации, выполненного в виде последовательно соединенных синхронного детектора 3, интегратора и сумматора 5- Датчик 6 угла через блок 7 синхронизации подключен к управляющему входу синхронного детектора 3 К второму входу сумматора 5 подключен блок 8 компенсации. Устройство работает следующим образом . В статическом режиме, т.е. на такой скорости вращения, при которой. сигналом от неуравновешенности можно пренебречь, сигнал датчика 1 представляет собой смесь сигналов от некруглости ч несоосности. Сигнал датчика 1 поступает на вход синхронного детектора 3, управляемого импульсами схемы синхронизации, фаза . которых определяется импульсами датчика 6 угла, формируемыми в момент прохождения под ним метки, нанесенной на ротор. После детектирования сигнал поступает на интегратор k с постоянной времени интегрирования много большей периода вращения. Через несколько периодов сигнал на выходе интегратора ч принимает значение, зависящее как от амплитуды, так и от фазы сигнала. Выходной сигнал интегратора 4 поступает на вход сумматора 5, на второй вход которого подается сигнал блока 8 компенсации, равный первому по величине, но обратной полярности. Сигнал блока 8 компенсации равный, но противоположный по знаку сигналу от некруглости и несоосности в дальнейшем не изменяется. На рабочей скорости сигнал датчика 1 представляет собой смесь сигналов от некруглости, несоосности и неуравновешенности, причем сигнал от некруглости и не-соосности - это сигнал датчика 1 в статическом режиме. Аналогичным образом сигнал детектируется,интегрируется- и алгебраически суммируется с сигналом блока 8 компенсации, и, следовательно, сигнал на выходе сумматора 5 зависит только от, неуравновешенности ротора. Таким образом, на выходе получается сигнал.
пропорциональный проекции радиусвектора дисбаланса на соответствующую ось измерений.
Устройство позволяет повысить точ ность балансировки благодаря подавлению внешних несинхронных помех синхронным детектором и интегратором, а также измерению не в отдельных точках, а в течение всеГО оборота ротора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения дисбаланса роторови уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU800753A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| (S)( УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА, содержащее датчик перемещения, датчик угла, связанный с ним блок синхронизации, блок компенсации и блок регистрации, входы которого связаны с выходами датчика перемещения, блока синхронизации и блока компенсации, отличающееся тем, что, с целью повышения точности балансировки, блок регистра14ии выполнен в виде последовательно соединенных синхронного детектора, связанного с выходом блока синхронизации, интегратора и сумматора, связанного выходами блока компенсации. | |||
