Предлагаемое устройство может быть использовано в медицине, криминологии, дефектоскопии, то есть во всех задачах, где требуется обнаружение мелких частиц, имеющих грани с хорошими отражательными свойствами.
Известны пинцеты глазные шарнирные для удаления стеклянных осколков (ОФ-6-212) производства Можайского инструментального завода ("НПКЦ МИЗ"), состоящие из двух подвижных относительно друг друга шарниров, имеющих на своем окончании специальные захваты (источник информации - http://www.mmiz.ru/)
Недостатком известных пинцетов является возможность обнаружения и удаления только таких осколков стекла, которые может увидеть хирург (оператор).
Известен криоэкстрактор нейрохирургический, состоящий из тонкой металлической трубки (канюли), внутри которой находится холодопровод и концентрически расположенная трубка для отвода испарившегося газообразного азота. При этом по перифирии канюли расположены вакуумные полости, обеспечивающие инструменту тепловую изоляцию. Криоэкстрактор может быть использован при извлечении из глаза посторонних немагнитных тел, например осколков стекла (источник информации http:www.window.edu.ru/window_catalog/pdf2txt?p_id=15738p_page=18).
Недостатком известного криоэкстрактора является возможность обнаружения и удаления только таких мелких осколков стекла, которые может увидеть хирург (оператор).
Известен хирургический микроскоп производство Oculus (Германия), содержащий стереоскопический диагональный преобразователь OCULUS SDI, специальную насадку для линз BIOM 3m, предназначенную для широкоугольного наблюдения за операцией, и массивную отдельно стоящую стойку. Микросокоп может быть использован для обнаружения и удаления стеклянных осколков при операции на глазном яблоке (источник информации-http://www.oculus.de/ru/sites/detail_ger.php?page=299)
Недостатком известного микроскопа является невозможность обнаружения малых стеклянных осколков, покрытых кровью, другой биологической жидкостью или грязью.
Известна система лазерной локации (обнаружения снайперов), основанная на эффекте "обратного блика" (уголковом эффекте), позволяющая обнаруживать мелкоразмерные световозвращающие объекты, содержащие окуляр, объектив и ПЗС-матрицу с электронным блоком обработки сигнала (Охотник на охотника / Мамонтов Дм. // "Популярная механика" 7 за 2006 г., стр.32-35).
Недостатком этой системы является невозможость обнаружения загрязненных мелкоразмерных стеклянных частиц, например, на поверхности раны.
Известен способ измерения скорости движения рассеивающих микрообъектов, основанный на освещении рассеивающего микрообъекта перпендикулярно направлению движения двумя соосными пучками когерентного излучения, имеющими различные радиусы кривизны волновых фронтов в плоскости микрообъектива. Рассеянное излучение каждого из двух пучков осуществляется двумя фотоприемниками, аналоговый сигнал с которых преобразуется с помощью аналого-цифрового преобразователя в цифровые сигналы. После чего для каждого цифрового сигнала вычисляют корреляционные функции (патент RU 2223504 C1 / И.В.Федосов, В.В.Тучин. - заявка 2002112159, заявл. 06.05.02 г., опубл. 10.02.04 г. в БИ 4. - 6 с.).
Наиболее близким к заявляемому является способ корреляционного измерения скорости, заключающийся в облучении диффузно рассеивающего объекта пучком оптического излучения, регистрации флуктуации интенсивности рассеянного света в плоскости, оптически сопряженной с плоскостью объекта посредством объектива с заданным увеличением с помощью двух фотоприемников. По относительной задержке сигналов фотоприемников вычисляют скорость движения объекта. (А.с. СССР 1675782, МПК G01P 3/08).
Недостатком известного способа является невозможность осуществлять определение положения в выбранной системе координат неподвижных слабоотражающих включений на фрагменте контролируемой поверхности.
Наиболее близким по своей технической сущности к устройству, реализующему заявляемый способ, является устройство для контроля качества поверхности цилиндрических отверстий, содержащее цилиндрический корпус, соосно закрепленную в нем державку с центральным отверстием, трубу, установленную в этом отверстии с возможностью осевых и угловых перемещений, закрепленный на державке привод перемещения трубы, выполненный в виде зубчатого соединения, палец, электродвигатель, контакты, рычаги, закрепленную в корпусе втулку с центрирующем конусом, установленный на втулке и подпружиненный пружиной в осевом направлении стакан, закрепленную на трубе цилиндрическую оправку, установленный в ней палец, подпружиненный пружиной, закрепленный на пальце тросик, размещенный в трубе. При этом палец размещен в пазах. Устройство для контроля качества поверхности цилиндрических отверстий содержит также закрепленный в трубе световод, рабочий торец которого расположен перпендикулярно оси трубы и оптически связан с другим торцом световода, лазер с блоками питания и управления, и приемник излучения с фильтром высоких частот и регистрирующим блоком. (А.с. SU 1435938, опубл. 07.11.88 в БИ 41).
Недостатком известного является устройство для контроля качества поверхности цилиндрических отверстий является невозможность осуществлять определение положения в выбранной системе координат неподвижных слабоотражающих включений на фрагменте контролируемой поверхности.
В основу изобретения поставлена задача - определение положения в выбранной системе координат неподвижных включений со светоотражающими гранями.
Данная задача достигается за счет того, что в способе определения расположения малых немагнитных включений на поверхности, заключающимся в облучении объекта пучком оптического излучения, одновременной регистрации интенсивности рассеянного света и сканировании пучка оптического облучения, согласно изобретению предварительно выбирают фрагменты контролируемой поверхности, неоднократно сканируют эти фрагменты, меняя при этом тип, направление и точку начала сканирующего движения, пучком оптического излучения, меняющего свою пространственную ориентацию при каждом цикле сканирования, регистрируют координаты нахождения участков, где была зафиксирована наибольшая интенсивность рассеянного света для каждого типа, направления и точки начала сканирующего движения, пересчитывают полученные координаты в единой системе координат, по полученным координатам определяют положение малых включений со светоотражающими гранями.
Задача решается также за счет того, что в устройстве, содержащем корпус с закрепленной на ней державкой, зубчатое зацепление, блок управления, соединенный с электродвигателем, с регистрирующим блоком, приемником излучения, лазером, который сопряжен своей излучающей поверхностью с одним из торцов световода, согласно изобретению дополнительно снабжено пятью электродвигателями, корпус выполнен вертикальным с укрепленной на нем с возможностью вертикального линейного и углового в горизонтальной плоскости перемещений державкой, с закрепленной на ней первым электродвигателем, ось которого жестко связана с первым ходовым винтом, соединенным со вторым электродвигателем, имеющим возможность линейно перемещаться, при этом ось второго электродвигателя соединена через зубчатое зацепление с третьим электродвигателем, ось которого жестко связана со вторым ходовым винтом, обеспечивающим возможность линейного перемещения четвертого электродвигателя, с установленным на нем приемником излучения, при этом один торец оси четвертого электродвигателя соединен с микрометрическим винтом через третий ходовой винт, другой торец четвертого электродвигателя соединен с внешним кольцом шарового шарнира, имеющего возможность угловых перемещений; внутреннее кольцо шарового шарнира соединено с возможностью угловых перемещений с одним торцом оси пятого электропривода, второй торец которой соединен через четвертый ходовой винт со вторым микрометрическим винтом, при этом шаровой шарнир соединен со световодом, имеющим на выходном торце линзу. Кроме того, блок управления соединен с пятью электродвигателями, с устройством накопления массива информации и устройством анализа и обработки информации, с блоком регистрации, при этом приемник излучения соединен с устройством накопления массива информации, который соединен с устройством анализа и обработки информации, соединенным с блоком регистрации.
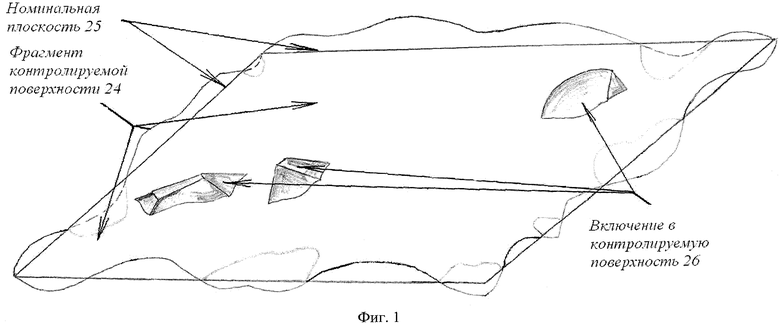
На фиг.1 изображена поверхность с расположенными на ней включениями со светоотражающими гранями.
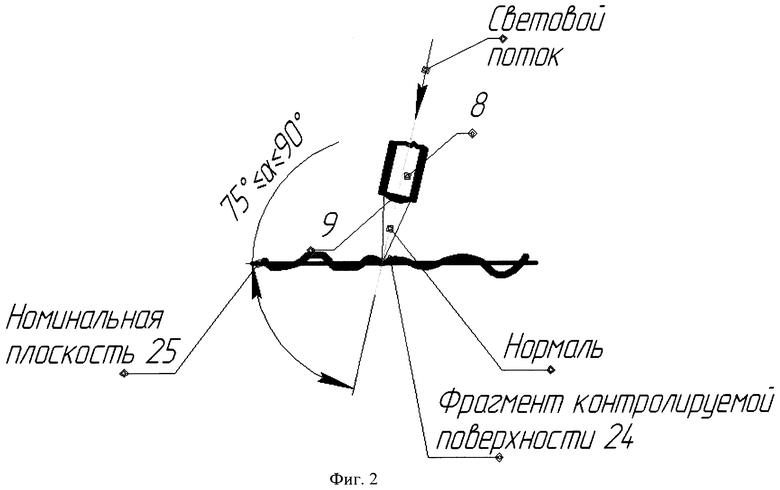
На фиг.2 изображено отражение светового потока, сформированного источником света - лазером.
На фиг.3 показано спиралевидное сканирующее движение излучения лазера.
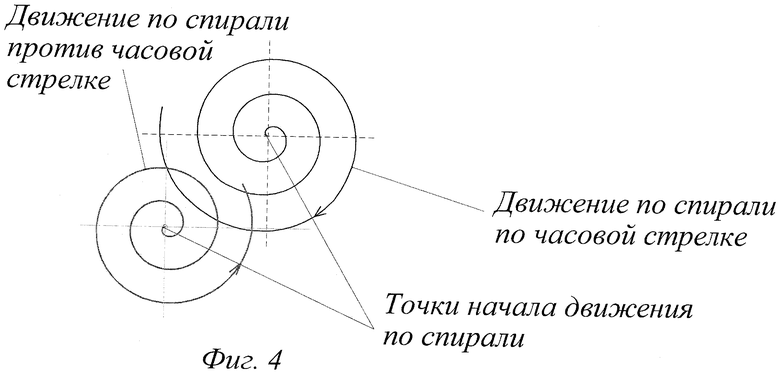
На фиг.4 показано сканирующее движение по строкам излучения от лазера.
На фиг.5 показана кинематическая схема устройства, реализующего заявляемый способ.
На фиг.6 показана взаимосвязь между информационными и энергетическими каналами, между электронными и электрическими компонентами устройства, реализующего заявляемый способ.
Устройство, реализующее заявляемый способ, содержит вертикальный корпус 1, державку 2, шаровой шарнир 3, два компланарных взаимоперперпендикулярных микрометрических винта 4 и 5, лазер 6, приемник излучения 7, световод 8, линзу 9, устройства накопления массивов информации 10, устройства анализа и обработки информации 11, блок управления 12, регистрирующий блок 13, электродвигатели 14, 15, 16, 17, 18, ходовые винты 19, 20, 21, 22, зубчатое зацепление 23, фрагмент контролируемой поверхности 24, номинальную плоскость 25, малые включения 26 со светоотражающими гранями, внешнее кольцо 27 и внутреннее кольцо 28 шарового шарнира 3. При этом на вертикальном корпусе 1 установлена с возможностью (фиг.5) вертикального перемещения державка 2, на которой установлен с возможностью поворота в горизонтальной плоскости ходовой винт 19, приводимый во вращение электродвигателем 14. Ходовой винт 20 перемещает в горизонтальной плоскости электродвигатель 16, приводящий во вращение зубчатое зацепление 23, на горизонтальной плоскости одного из зубчатых колес которого установлен ходовой винт 20, приводимый во вращение электродвигателем 15. Ходовой винт 20 перемещает в горизонтальной плоскости электродвигатель 17, связанный одним торцом своей оси с ходовым винтом 21, приводимым во вращение микрометрическим винтом 4. Другой торец оси электродвигателя 17 связан с внешним кольцом 27 шарового шарнира 3. В одной горизонтальной плоскости (компланарно) с электродвигателем 17 находится электродвигатель 18 таким образом, что оси электродвигателей 17 и 18 образуют угол 90°. Один торец оси электропривода связан с ходовым винтом 21, приводимым во вращение микрометрическим винтом 5. Другой торец оси электродвигателя 18 связан с внутренним кольцом 28 шарового шарнира 3. На внутреннем торце 28 шарового шарнира 3 установлен световод 8 с линзой 9 на выходном торце. Под световодом 8 размещен фрагмент контролируемой поверхности 24. Приемник излучения 7 жестко соединен с корпусом электродвигателя 17 с возможностью перемещения в вертикальной и горизонтальных плоскостях, а также с возможностью изменения своей пространственной ориентации. Блок управления 12 связан с блоком регистрации 13, с электродвигателями 14, 15, 16, 17, 18, а также с лазером 6, с приемником излучения 7, с устройством накопления массивов информации 10 и с устройством анализа и обработки информации 11. При этом приемник излучения 7 связан с устройством накопления массивов информации 10, которое связано с устройством анализа и обработки информации 11. Последний (блок 11) связан с блоком регистрации 13.
Устройство, реализующее заявляемый способ, работает следующим образом. Вертикальный корпус 1 устанавливают рядом с фрагментом контролируемой поверхности 24. После этого благодаря возможности вертикального перемещения державки 2 вдоль корпуса 1 световод 8 помещается над фрагментом контролируемой поверхности 24 и выбирается необходимое расстояние между наружной поверхностью линзы 9 на световоде 8 и номинальной плоскостью 25 фрагмента контролируемой поверхностью 24. Предварительно выбирается фрагмент контролируемой поверхности 24, по возможности близкий к плоскости (фиг.1). После этого с помощью микрометрических винтов 4 и 5 через соответственно ходовые винты 21 и 22 приводятся во вращение оси соответственно электродвигателей 17 и 18, которые в свою очередь приводят во вращение соответственно внешнее 27 и внутреннее 28 кольцо шарового шарнира 3. Повороты шарового шарнира 3 позволят обеспечить необходимую пространственную ориентацию наружной поверхности линзы 9 световода 8 по отношению к номинальной плоскости 25. Номинальная плоскость 25 - это аппроксимирующая плоскость некоторого фрагмента контролируемой поверхности 24, перпендикулярная корпусу 1. Необходимая пространственная ориентация может быть обеспечена не только вращением микрометрических винтов 4 и 5, но и работой электродвигателей соответственно 17, 18, оси которых соответственно связаны с внешним 27 и внутренним 28 кольцом шарового шарнира 3. Электродвигатели 17 и 18 управляются блоком управления 12. Затем оператор выставляет вручную приемник излучения 7 таким образом, чтобы зеркально отраженный поток света от участка освещаемого фрагмента контролируемой поверхности 24 максимально попадал на чувствительную поверхность приемника излучения 7. После выбора фрагмента контролируемой поверхности 24 выбирается точка начала координат данного фрагмента. Эта точка необходима будет для пересчета к единой системе координат. Практика поиска малых немагнитных включений 26 со светоотражающими гранями показала, что целесообразно, в первую очередь, использовать сканирование по строкам. При этом должны размечаться точки начала сканирования и направление сканирования. Сканирование по строкам необходимо провести не менее 3 раз. Затем проводят сканирование не менее 2 раз по спирали. В этом случае начальные точки сканирования по спирали и направление сканирования должны также различаться. При сканировании, например, по строкам через блок управления 12 включаются и управляются электродвигатели 14 и 15. Работа каждого из этих электродвигателей 14 и 15 может определять длину строки или расстояние между строками сканирования (фиг.3), координату начала сканирования, а также направление сканирующего движения. При сканировании по спирали (фиг.4) предварительно включаются управляемые через блок управления 12 электродвигатели 14 и 15, которые своей работой определяют начальную точку сканирования по спирали. После этого электродвигатели 14 и 15 выключаются блоком управления 12. Затем по команде с блока управления 12 начинают работать электродвигатели 15 и 16. Работа электродвигателя 15 перемещает в горизонтальной плоскости с помощью ходового винта 20 шаровой шарнир 3, электродвигатели 17 и 18, ходовые винты 21 и 22, микрометрические винты 4 и 5, а также световод 8, линзу 9 и приемник излучения 7, соединенный с корпусом электродвигателя 17. Электродвигатель 16 приводит во вращение зубчатое зацепление 23, которое своей работой поворачивает в горизонтальной плоскости на определенный угол электродвигатель 15, ходовой винт 20, шаровой шарнир 3, электродвигатели 17 и 18, ходовые винты 21 и 22, микрометрические винты 4 и 5, а также световод 8, линзу 9 и приемник излучения 7, соединенный с корпусом электродвигателя 17. Сложение линейного движения, сформированного работой электродвигателя 15, кругового движения, определяемого работой электродвигателя 16, позволяют перемещать шаровой шарнир 3 и вместе с ним световод 8, линзу 9 по спирали. По достижении определенного количества циклов сканирования (при сканировании по строкам - количество строк, при сканировании по спирали - количество витков (периодов) спирали) блок управления 12 отключает работу электродвигателей 14, 15, 16, которые обеспечивают сканирующие движения. Практика показала, что для получения достоверных результатов необходимо провести не менее 5-ти циклов сканирования, отличающихся между собой типом сканирования, пространственной ориентацией положения линзы 9 на световоде 8 и начальной точкой сканирования. Далее оператор, работающий с устройством, реализующим заявляемый способ, выбирает начальную точку нового процесса сканирования, через блок управления 12 подводит центр (ось симметрии) линзы 9 к выбранной точке начала сканирования. После этого через блок управления 12 оператор включает необходимые электропривода для формирования сканирующих движений по строкам или по спирали. Во время сканирующих движений световода 8 блок управления 12 включает лазер 6, сформированное им световое излучение через световод 8 подается на линзу 9, которая фокусирует световое излучение на участке фрагмента контролируемой поверхности 24. При этом линза 9 ориентируется в пространстве таким образом, чтобы нормаль к ее наружной поверхности могла образовывать некоторый острый угол к номинальной плоскости 25 фрагмента контролируемой поверхности 24 (фиг.2). Во время сканирующего движения световода 8 с линзой 9 при работающем источнике света 6 отраженное излучение фиксируется приемником излучения 7 с привязкой величины интенсивности света к координате фрагмента контролируемой поверхности 24. Этот массив информации сохраняется в устройстве накопления массивов информации 10 по команде с блока управления 12, откуда опять по команде с блока управления 12 попадает в устройство анализа и обработки информации 11. Отметим, что точка начала координат фрагмента контролируемой поверхности 24 может совпадать с точкой начала одного из циклов сканирования. Таким образом, осуществляется сканирование фрагмента контролируемой поверхности 24 на предмет определения на ней координат расположения малых включений 26 со светоотражающими гранями Практика показала, что при контроле загрязненных биологических тканей угол наклона нормали линзы 9 к номинальной плоскости 25 должен составлять не более 90° и не менее 75°. После совершения некоторого процесса сканирования меняется либо угол пространственной ориентации световода 8 с линзой 9, либо тип сканирующего движения (спираль (фиг.3)), горизонтальные строки (фиг.4)), либо направления горизонтальных строк относительно предыдущего цикла сканирования по строкам, либо направление сканирования по спирали, а также изменение координат точек начала процесса сканирования.
Расстояние между строками при сканировании по строкам и период спиральной кривой при сканировании по спирали определяются геометрическими параметрами световода 8 (площади торца), фокусным расстоянием применяемой линзы 9, а также расстоянием между наружной поверхностью линзы 9 и номинальной плоскостью 25 фрагмента контролируемой поверхности 24. Период спирали и расстояние между строками должны по величине не превосходить световое пятно, сформированное на фрагменте контролируемой поверхности 24. В таком случае на фрагменте контролируемой поверхности 24 не будет участков, которые не были проконтролированы на отражательные свойства устройством, реализующим заявляемый способ. Изменение пространственной ориентации световода 8 с линзой 9 с помощью шарового шарнира 3 может осуществляться при каждом процессе сканирования по заранее разработанной программе или может быть выбрано оператором, проводящем операции сканирования. Последнее необходимо для минимизации времени определения положения малых включений 26 (например, стеклянных осколков) путем использования опыта оператора.
Во время работы устройства, реализующего заявляемый способ, установленное положение в пространстве приемника излучения 7 при контроле одного и того же фрагмента контролируемой поверхности 24 не меняется. Это необходимо для того, чтобы уменьшить количество факторов, влияющих на интенсивность отраженного потока света от некоторого фрагмента контролируемой поверхности 24. Микрометрический винт 4, ходовой винт 21 и электродвигателя 17, а также микрометрический винт 5, ходовой винт 22 и электродвигатель 18 имеют оси симметрии, которые образуют прямой угол и лежат в одной плоскости. Это необходимо для того, чтобы облегчить пересчет углов пространственной ориентации световода 8 к системе координат, привычной и понятной оператору, работающему с устройством. При работе электродвигателей 17 и 18 оси последних могут быть отсоединены от соответственно ходового винта 21, микрометрического винта 4 и ходового винта 22, микрометрического винта 5, например, через муфты. Это может быть необходимо для уменьшения веса и мощности используемых электродвигателей 17 и 16. Наличие пар - ходовой винт 21, микрометрический винт 4 и ходовой винт 22, микрометрический винт 5 объясняется тем, что при относительно больших размерах включений 26 нет необходимости в точной ориентации в пространстве световода 8 с линзой 9. В этом случае достаточно использовать ходовые винты 21 и 22 или поворачивать шаровой шарнир 3 со световодом 8 с помощью электродвигателей 17 и 18. Чем мельче включения 26, тем необходима бóльшая точность ориентации в пространстве световода 8. В этом случае используются микрометрические винты 4 и 5. Зубчатое зацепление 23 необходимо для обеспечения определенной частоты вращения вдоль вертикальной оси шарового шарнира 3 со световодом 8 и линзой 9, которые при этом совершают еще линейные движения в горизонтальной плоскости. Зубчатое зацепление 23 может быть заменено ременной передачей или гибким пассиком. Это может удешевить конструкцию устройства, реализующего заявляемый способ. По мере накопления массивов информации интенсивности отраженного излучения от контролируемой поверхности 24, увязанной с координатами включений в фрагменте контролируемой поверхности 26 в устройстве накопления массивов информации 10, по команде с блока управления 12 осуществляется анализ полученной информации в устройстве анализа и обработки информации 11. Устройства анализа и обработки информации 11 также управляется блоком управления 12 и определяет координату контролируемого фрагмента поверхности 24, где имеет место наибольшая интенсивность отраженного светового потока. Эта координата соответствует наиболее вероятному расположению малых включений 26 (например, стеклянных осколков) и по команде с блока управления 12 регистрируется на блоке 13, в качестве которого может быть использован монитор, принтер и т.д. В случае, когда кровь или иная биологическая жидкость на поверхности раны с осколками стекла запеклась, т.е. белок коагулировался, и в результате этого отражательные свойства малых включений 26 (например, микрочастиц стекла) уменьшились или полностью были утрачены, поверхность раны необходимо оросить каким-либо антисептиком. Такого рода антисептическую обработку следует проводить до тех пор, пока с помощью устройства, реализующего заявляемый способ, не будут зафиксированы малые включения 26 (например, микроскопических частиц стекла). Аналогичным образом поступают в случае, если на поверхности раны находится грязь. Орошение поверхности раны антисептиком способно обнажить одно из светоотражающих ребер малых включений 26 (например, стеклянные частицы), в результате чего при сканирующем движении источника света приемником излучения 7 может быть зафиксировано световое излучение, отраженное от участка очищенного в результате орошения светоотражающего ребра или фрагмента поверхности включений 26 (например, стеклянные частицы). Поскольку малые включения 26 (например, микрочастицы стекла (бой)) не могут иметь канонические формы, т.е. они не могут иметь сферическую форму, коническую, кубическую, форму параллелепипеда, параллелаграмма и т.д., то это обстоятельство может определять множество углов пространственной ориентации при сканирующих движениях излучения лазера 6, передаваемого в контролируемую зону с помощью световода 8 и линзы 9, и приемника излучения 7. В случае, если известна форма микровключений 26 (например, микрочастиц стекла), то можно заранее определить оптимальные значения углов пространственной ориентации при сканирующем движении излучения лазера 6, передаваемое в контролируемую зону с помощью световода 8 и линзы 9, и приемника излучения 7. Например, в производстве лопаток ГТД на финишных операциях используют стекляные микрошарики. В качестве электродвигателей 14, 15, 16, 17, 18 целесообразно использовать шаговые двигатели (например, электродвигатель шаговый ДШИ - 200 - 3 - 3), т.к. они имеют достаточные динамические свойства, имеют необходимую мощность и при их работе нет необходимости в датчиках контроля угла поворота оси электропривода, поскольку шаговые двигатели управляются импульсами, с подачей каждого из них ось электропривода поворачивается на заданный угол. Вид используемого источника света и приемника излучения 7 определяют расстояния, на которые должны отстоять внешняя поверхность линзы 9 и чувствительная поверхность приемника излучения 7 от номинальной плоскости 25 фрагмента контролируемой поверхности 24. Расстояния эти должны быть максимально приближены к их фокусным расстояниям. В устройстве, реализующем заявляемый способ, световое излучение к контролируемому фрагменту поверхности 23 подводилось с помощью световода 8. Концентрация светового излучения на возможно малом участке контролируемой поверхности осуществляется с помощью линзы 9, установленной на выходном торце световода 8. Это необходимо для получения наиболее достоверных результатов контроля. В качестве источника при реализации заявляемого способа использовался полупроводниковый линейный лазер 6 красного цвета производства фирмы ELFA (марка FP-64/3LF line laser red (1071-3)) и полимерный световод с оптоволоконным проводником и линзой производства фирмы Di alight (марка Lightguide sing flex 80 mm (1063-3)). В качестве приемника излучения 7 была использована ПЗС-матрица 1/3" производства фирмы Sony (SK P400 XAIP/SO). В случае использования устройства, реализующего заявляемый способ, при обнаружении осколков стекла в роговице глаза, использование в качестве источник света лазера 6 или лампы, может привести к раздражающему воздействию на глаза. По этой причине предпочтительнее в этом случае использовать ультрафиолетовый или инфракрасный источник света вместо лазера 6. В качестве приемника излучения 7 может быть использована и видеокамера. В случае использования приемника излучения 7, способного фиксировать цвет, существует возможность увеличить достоверность обнаружения координат нахождения малых включений 26 (например, осколков стекла).
По полученным таким образом координатам вычисляют положение малых включений со светоотражающими гранями. При освещении участка фрагмента контролируемой поверхности 24 имеет место диффузное отражение светового потока, т.к. загрязненная поверхность, как правило, не имеет отражательной способности. В случае попадания на освещенный участок фрагмента контролируемой поверхности малого включения 26 со светоотражающими гранями имеет место зеркальное отражение, т.е. появляется некоторое пространственное направление, где будет наибольшая интенсивность отраженного светового потока. При фиксировании координаты точки, в которой была измерена наибольшая интенсивность отраженного света, можно утверждать, что координаты этой точки соответствуют расположению малого включения 26 со светоотражающими гранями. Пространственная ориентация лазера 6 может быть такой при освещении участка фрагмента контролируемой поверхности 24, что световое излучение, сформированное лазером 6, либо не попадет на светоотражающие грани малого включения 26 и, таким образом, будет иметь место только диффузное отражение света, либо зеркально отраженное световое излучение будет иметь такую пространственную ориентацию, что наибольшая интенсивность отраженного светового излучения не сможет быть зафиксирована приемником излучения 7. При сканировании контролируемого фрагмента поверхности 24 лазером 6 и приемником излучения 7 по различным траекториям можно получить массив информации интенсивности отраженного света, привязанный (поставленный в функциональную зависимость) к координате фрагмента контролируемой поверхности 24, где эта интенсивность отраженного света была измерена. Для повышения достоверности определения координат участков фрагмента контролируемой поверхности 24, где имеет место зеркальное отражение светового излучения, помимо изменения траекторий сканирующего движения излучения лазера 6, проходящего через световод 8 и линзу 9, и приемника излучения 7, следует изменять пространственную ориентацию световода 8 и динзы 9. В этом случае одно из положений световода 8 и линзы 9 в пространстве может быть таким, что отраженный световой поток от зеркальной грани малого включения 26 попадет в приемник излучения 7. Это позволит сформировать массив данных интенсивности отраженного света от участков фрагмента контролируемой поверхности 24, полученный не только в результате различных траекторий сканирующих движений, но и при разной ориентации в пространстве световода 8 и линзы 9. Ориентация в пространстве приемника излучения 7 во время всего процесса определения местоположения малых включений 26 со светоотражающими гранями остается неизменной. Это необходимо для того, чтобы не увеличивать количество факторов, влияющих на зафиксированную интенсивность отраженного светового потока. Для всех полученных массивов информации о интенсивности отраженного света, соответствующих различным координатам фрагмента контролируемой поверхности, определяются координаты фрагмента контролируемой поверхности, где имеет место наибольшая интенсивность отраженного света. Именно эти координаты определяют наиболее вероятное расположение малых включений 26, имеющих светоотражающие грани. При этом используется больше массивов информации об интенсивности отраженного света, привязанной к координатам фрагмента контролируемой поверхности, полученных при различных траекториях сканирования и при различных углах ориентации в пространстве излучения лазера 6, доставляемого в зону контроля с помощью световода 8 и линзы 9.
Испытания устройства, реализующего заявляемый способ, осуществлялось на слое параллона толщиной 5 мм и площадью 4 см2, обернутого медицинской марлей, на поверхность которого была нанесена типографская краска черного цвета. На краску было рассыпано и вдавлено битое бутылочное стекло темно-зеленого цвета, которое было предварительно просеяно через сито с величиной стороны ячейки 0,35 мм. Вдавленные частицы стеклянного боя предварительно были взвешены. Их вес составлял 1,2 г. После определения положения стеклянного боя на параллоне, обернутом марлей, и удаления их пинцетом, найденный стеклянный бой имел вес
1,32 г. Увеличение массы стеклянного боя после извлечения может быть объяснено тем, что извлеченный стеклянной бой был испачкан типографской краской, что и способствовало увеличению его веса.
Сканирующее движение излучения лазера 6, проходящего через световод 8 и линзу 9, по спирали (фиг.3) при нескольких циклах сканирования должно отличаться между собой. Это может быть достигнуто за счет изменения координаты начала движения по спирали, а также за счет изменения движения по спирали (против или по часовой стрелке). Выбор этой начальной координаты может быть осуществлен случайным образом или может быть подчинен некоторому закону. Сканирующее движение излучения лазера 6, проходящего через световод 8 и линзу 9, по строкам (фиг.4) при нескольких циклах сканирования должно отличаться между собой. Это может быть достигнуто за счет изменения координаты начала движения по строкам, а также за счет изменения угла между направлениями движения по строкам у различных циклов сканирования. Выбор начальной координаты и направления движения по строкам могут быть осуществлены случайным образом или по некоторой зависимости. Устройство накопления массивов информации 10, устройство анализа, обработки информации 11 и устройство управления 12 могут быть реализованы либо аппаратно, либо программно. В случае если устройство накопления массивов информации 10, устройство анализа и обработки информации 11 будут реализовываться как самостоятельные устройства, то устройство накопления информации могут быть выполнены с помощью, например, FLESH-памяти. А устройство анализа и обработки информации 11 и устройство управления 12 могут быть осуществлены с помощью одного из известных программируемых контроллеров, например контроллера LOGO производства фирмы SIEMENS. Анализ и обработка полученных в результате сканирования массивов информации состоит, во-первых, в приведении всех циклов измерений и фиксаций интенсивности отраженного излучения к единой системе координат, которая понятна и привычна оператору, работающему с устройством. Во-вторых, в каждом цикле сканирования отыскиваются координаты точек, где была зафиксирована наибольшая интенсивность отраженного света. В-третьих, среди найденных точек с наибольшей интенсивностью отраженного света отыскиваются точки с одинаковыми координатами. И, в-четвертых, координаты этих точек визуализируются для оператора, работающего с устройством, либо на бумажном носителе или на мониторе (при этом считается, что начало координат определяется предварительно перед проведением анализа и обработки результатов циклов сканирования). Именно в этих точках наиболее вероятно расположены малые включения 26 со светоотражающими гранями. Очевидно, что чем больше будет проведено циклов сканирования при разных пространственных ориентациях излучения лазера 6, определяемых пространственным положением световода 8 и линзы 9, и при разных направлениях и углах сканирующих движений, тем более достоверные координаты нахождения малых включений 26 со светоотражающими гранями будут определены. Синхронизация работы лазера 6, приемника излучения 7, устройства анализа и обработки полученных массивов информации 11, электродвигателей 14, 15, 16, 17, 18 осуществляется блоком управления 12, который среди прочего задает скорость сканирующих движений, их направление и тип (сканирование по строкам или по спирали). Изменение режимов сканирования происходит по команде оператора, работающего с устройством, реализующим заявляемый способ, через блок управления 12. Определенные координаты расположения малых включений 26 со светоотражающими гранями по команде с блока 12 управления могут быть выведены на монитор, на бумажный носитель и т.д. Натурные испытания показали, что скорость сканирующего движения светового потока, сформированного лазером 6, световодом 8 и линзой 9 над фрагментом контролируемой поверхности 24, не влияют на достоверность определения координат расположения малых включений 26 со светоотражающими гранями.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |
| Многоканальный конфокальный микроскоп | 2016 |
|
RU2649045C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1998 |
|
RU2195694C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| УСТРОЙСТВО КОНТРОЛЯ МАКРОДЕФЕКТОВ НА ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2013 |
|
RU2531037C1 |
| Устройство для измерения линейных размеров | 1989 |
|
SU1744444A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| Оптико-механическое сканирующее устройство | 1981 |
|
SU1019388A1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| СПОСОБ СКОРОСТНОЙ ЛАЗЕРНОЙ МАРКИРОВКИ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236952C2 |


Изобретение может быть использовано в медицине, криминологии, дефектоскопии. Сущность изобретения: выбирают фрагменты контролируемой поверхности, неоднократно сканируют эти фрагменты, меняя при этом тип, направление и точку начала сканирующего движения, пучком оптического излучения, меняющего свою пространственную ориентацию при каждом цикле сканирования, регистрируют координаты нахождения участков, где была зафиксирована наибольшая интенсивность рассеянного света для каждого типа, направления и точки начала сканирующего движения, пересчитывают полученные координаты в единой системе координат, по полученным координатам определяют положение малых включений со светоотражающими гранями. Устройство оснащено пятью электродвигателями. Корпус выполнен вертикальным с укрепленной на нем с возможностью вертикального линейного и углового в горизонтальной плоскости перемещений державкой. 2 н. и 1 з.п. ф-лы, 6 ил.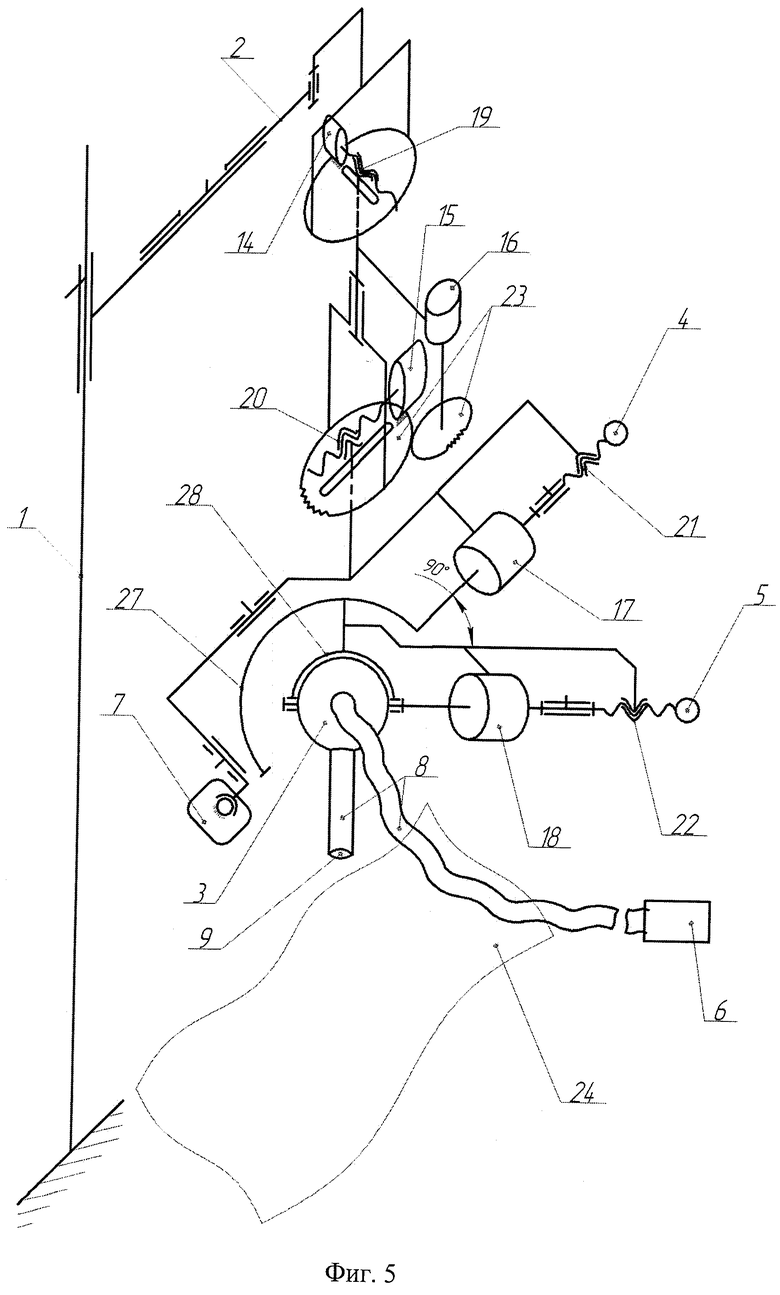
1. Способ определения расположения малых немагнитных включений на поверхности, заключающийся в облучении объекта пучком оптического излучения, одновременной регистрации интенсивности рассеянного света и сканировании пучка оптического облучения, отличающийся тем, что предварительно выбирают фрагменты контролируемой поверхности, неоднократно сканируют эти фрагменты, меняя при этом тип, направление и точку начала сканирующего движения, пучком оптического излучения, меняющего свою пространственную ориентацию при каждом цикле сканирования, регистрируют координаты нахождения участков, где была зафиксирована наибольшая интенсивность рассеянного света для каждого типа, направления и точки начала сканирующего движения, пересчитывают полученные координаты в единой системе координат, по полученным координатам определяют положение малых включений со светоотражающими гранями.
2. Устройство определения малых немагнитных включений на поверхности, содержащее корпус с закрепленной на ней державкой, зубчатое зацепление, блок управления, соединенный с электродвигателем, с регистрирующим блоком, приемником излучения, лазером, который сопряжен своей излучающей поверхностью с одним из торцов световода, отличающееся тем, что, с целью определения положения в выбранной системе координат неподвижных включений со светоотражающими гранями, оснащено пятью электродвигателями, корпус выполнен вертикальным с укрепленной на нем с возможностью вертикального линейного и углового в горизонтальной плоскости перемещений державкой, с закрепленным на ней первым электродвигателем, ось которого жестко связана с первым ходовым винтом, соединенным со вторым электродвигателем, имеющим возможность линейно перемещаться, при этом ось второго электродвигателя соединена через зубчатое зацепление с третьим электродвигателем, ось которого жестко связана со вторым ходовым винтом, обеспечивающим возможность линейного перемещения четвертого электродвигателя, с установленным на нем приемником излучения, при этом один торец оси четвертого электродвигателя соединен с микрометрическим винтом через третий ходовой винт, другой торец четвертого электродвигателя соединен с внешним кольцом шарового шарнира, имеющего возможность угловых перемещений; внутреннее кольцо шарового шарнира соединено с возможностью угловых перемещений с одним торцом оси пятого электродвигателя, второй торец которой соединен через четвертый ходовой винт со вторым микрометрическим винтом, при этом шаровой шарнир соединен со световодом, имеющим на выходном торце линзу.
3. Устройство по п.2, отличающееся тем, что блок управления соединен с пятью электродвигателями, с устройством накопления массива информации и устройством анализа и обработки информации, с блоком регистрации, при этом приемник излучения соединен с устройством накопления массива информации, который соединен с устройством анализа и обработки информации, соединенным с блоком регистрации.
| СПОСОБ ДИАГНОСТИКИ НЕОДНОРОДНОСТИ ПРОЗРАЧНЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315992C1 |
| Устройство для контроля качества поверхности цилиндрических отверстий | 1987 |
|
SU1435938A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ РАССЕИВАЮЩИХ МИКРООБЪЕКТОВ | 2002 |
|
RU2223504C1 |
| US 6879391 B1, 12.04.2005. | |||

