fmcЬ
KI
8п
N:
TB(tf)
..Xj-
Фае.}
2. Устройство для осуществления способа по п. 1, содержащее последовательно соединенные индукционный преобразователь поля, ключ, интегратор и регистрирующий прибор, последовательно соединенные блок фиксации переднего фронта сигналов.и блок задержки, отличающеес я тем, что, с целью повышения точности измерений, в него введены последовательно соединенные генератор дополнительной задержки и генератор фиксированного временного
интервала, а также два элемента И и триггер, при этом выход блока задержки через первые входы элементов И подсоединен к второму входу генератора фиксированного временного интервала и к входу генератора дополнительной задержки соответственно, выход генератора фиксированного временного интервала и вход триггера . связаны с управляющим входом ключа, а выходы триггера подсоединены к вторым входам элементов И,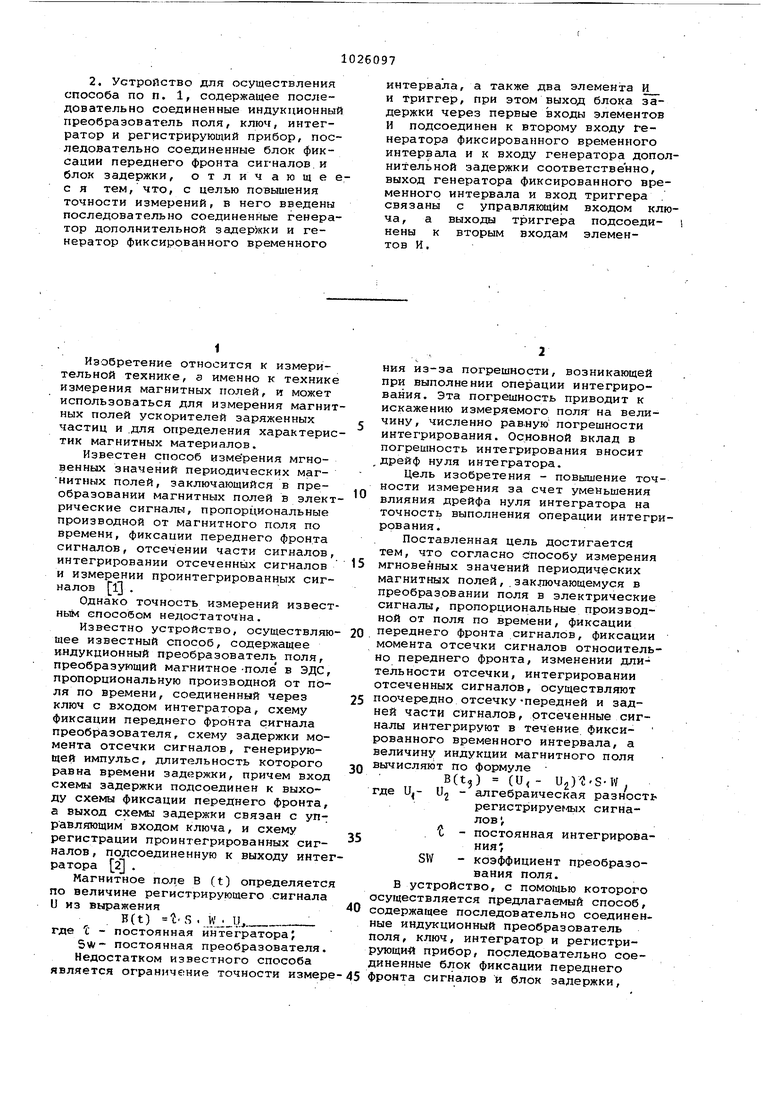
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь напряжения в частоту | 1988 |
|
SU1522407A1 |
| Интегратор | 1982 |
|
SU1062726A1 |
| Аналого-цифровой преобразователь | 1974 |
|
SU1005305A1 |
| Способ измерения мгновенных значений периодических магнитных полей и устройство для его реализации | 1979 |
|
SU764485A1 |
| Интегрирующий преобразователь напряжения в код | 1986 |
|
SU1410275A1 |
| Устройство для измерения пульсаций линейной скорости одиночной нити | 1981 |
|
SU983546A2 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1982 |
|
SU1101866A1 |
| Цифровой термометр | 1986 |
|
SU1404844A1 |
| Цифровой инфранизкочастотный широкополосный фазометр мгновенных значений | 1986 |
|
SU1368806A2 |
| Интегрирующий аналого-цифровой преобразователь | 1988 |
|
SU1525915A1 |
1. Способ измерения мгновенных Значений периодических магнитных полей, заключающийся з преоб-разовании поля в электрические сигналы, пропорциональные производной от поля по времени, фиксации перед него фронта сигналов, фиксации момента отсечки сигналов относительно переднего фронта, изменении длительности отсечки и интегрировании отсеченных сигналов, о т л и ч а юtq и и с я тем, что, с целью повышения точности измерений, осуществляют поочередно отсечку передней и задней части .сигналов, отсеченные сигналы интегрируют в течение фиксированного временного интервала, а величину цндукции магнитного поля вычисляют по формуле . B(t) ( Uj) SW, i где U - Ug - алгебраическая раэг ность регистрируемых (Л сигналов; - постоянная интегрирос вания} - коэффициент преобра зования поля.
1
Изобретение относится к измерительной технике, а именно к технике измерения магнитных полей, и может использоваться для измерения магнитных полей ускорителей заряженных частиц и .для определения характеристик магнитных материалов.
Известен способ измерения мгновенных значений периодических магнитных полей, заключающийся в преобразовании магнитных полей в электрические сигналы, пропорциональные производной от магнитного поля по времени, фиксации переднего фронта сигналов, отсечении части сигналов, интегрировании отсеченных сигналов и измерении проинтегрированных сигналов ij .
Однако точность измерений известным способом недостаточна.
Известно устройство, осуществляющее известный способ, содержащее индукционный преобразователь поля, преобразующий магнитное-поле в ЭДС, пропорциональную производной от поля по времени, соединенный через ключ с входом интегратора, схему фиксации переднего фронта сигнала преобразователя, схему задержки момента отсечки сигналов, генерирующей импульс, длительность которого равна времени задержки, причем вход схемы задержки подсоединен к выходу схемы фиксации переднего фронта, а выход схемы задержки связан с управляющим входом ключа, и схему регистрации проинтегрированных сигналов , подсоединенную к выходу интератора 2 .
Магнитное поле В (t) определяетс по величине регистрирующего сигнала и из выражения
B(t) tS. W-:JLгде с - постоянная интегратора;
постоянная преобразователя.
Недостатком известного способа является ограничение точности измерния из-за погрешности, возникающей при выполнении операции интегрирования. Эта погрешность приводит к искажению измеряемого поля на величину, численно равгную погрешности интегрирования. Основной вклад в погрешность интегрирования вносит дрейф нуля интегратора.
Цель изобретения - повышение точности измерения за счет уменьшения влияния дрейфа нуля интегратора на точность выполнения операции интегрирования.
Поставленная цель достигается тем, что согласно способу измерения 5 мгновенных значений периодических магнитных полей,.заключающемуся в преобразовании поля в электрические сигналы, пропорциональные производной от поля по времени, фиксации 0 переднего фронта сигналов, фиксации момента отсечки сигналов относительно переднего фронта, изменении длительности отсечки, интегрировании отсеченных сигналов, осуществляют 5 поочередно отсечку-передней и задней части сигналов, отсеченные сигналы интегрируют в течение фиксированного временного интервала, а величину индукции магнитного поля п вычисляют по формуле
B(t,) (U - U,,)2S-W/ где и,- Uj - алгебраическая разность регистрируе№1х сигналов ,
t - постоянная интегрирования;
SW - коэффициент преобразования поля.
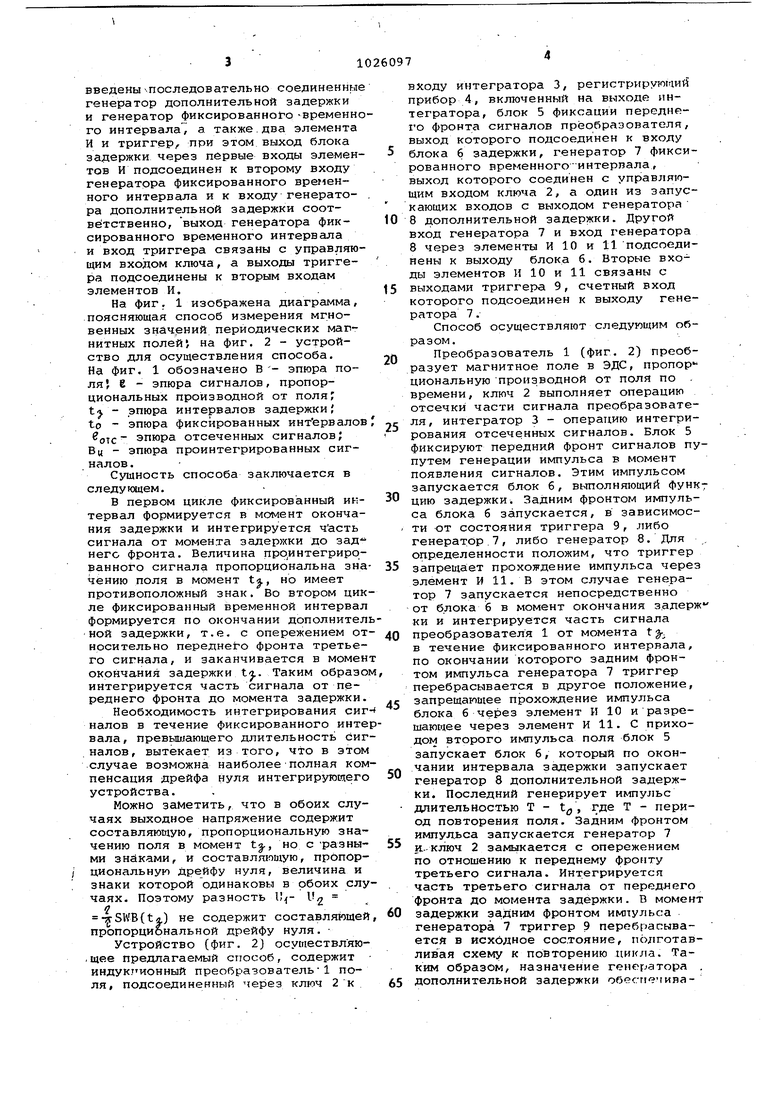
В устройство, с помощью которого осуществляется предлагаемый способ, 0 содержащее последовательно соединенные индукционный преобразователь поля, ключ, интегратор и регистрирующий прибор/ последовательно соединенные блок фиксации переднего 5 фронта сигналов и блок задержки. введены -.последовательно соединенные генератор дополнительной задержки и генератор фиксированного -временно го интервала, а также, два элемента И и триггер при этом выход блока задержки через первые входы элементов И подсоединен к второму входу генератора фиксированного временного интервала и к входу генератора дополнительной задержки соответственно, выход генератора фиксированного временного интервала и вход триггера связаны с управляющим входом ключа, а выходы триггера подсоединены к вторым входам элементов И.. . На фиг. 1 изображена диаграмма, поясняющая способ измерения мгновенных знач(ений периодических магнитных полейJ на фиг. 2 - устройство для осуществления способа. На фиг. 1 обозначено В - эпюра поля} 6 - эпюра сигналов, пропорциональных производной от поля; t - эпюра интервалов задержки} to - эпюра фиксированных интервалов отс эпюра отсеченных сигналов; BU - эпюра проинтегрированных сигналов. Сущность способа заключается в следующем. В первом цикле фиксированный интервал формируется в момент окончания задержки и интегрируется часть сигнала от момента задержки до зад- него фронта. Величина про интегрированного сигнала пропорциональна зна Чёнию поля в момент t, но имеет противоположный знак. Во втором цик ле фиксированный временной интервал формируется по окончании дополнител ной задержки, т.е. с опережением от носительно переднего фронта третьего сигнала, и заканчивается в момен окончания задержки t. Таким образо интегрируется часть сигнала от переднего фронта до момента задержки. Необходимость интегрирования сиг налов в течение фиксированного инте вала, превышающего длительность сиг налов, вытекает из того, что в этом случае возможна наиболее полная ком пенсация дрейфа нуля интегрирующего устройства. Можно заметить, что в обоих случаях выходное напряжение содержит составляющую, пропорциональную значению поля в момент t, но с разными знйками, и составляющую, пропорциональную дрейфу нуля, величина и знаки которой одинаковы в обоих слу чаях. Поэтому разность U/- U - SWB{t4) не содержит составляющей пропорциональной дрейфу нуля. Устройство (фиг. 2) осуществляю,щее предлагаемый способ, содержит индуктионный преобразователь-1 поля, подсоединенный через ключ 2к входу интегратора 3, регистрирующий прибор 4, включенный на выходе интегратора, блок 5 фиксации переднего фронта сигналов преобразователя, выход которого подсоединен к входу блока 6 задержки, генератор 7 фиксированного временного интервала, выход которого соединен с управляющим входом ключа 2, а один из запускающих входов с выходом генератора 8 дополнительной задержки. Другой вход генератора 7 и вход генератора 8 через элементы И 10 и 11 подсоединены к выходу блока 6. Вторые входы элементов И 10 и 11 связаны с выходами триггера 9, счетный вход которого подсоединен к выходу генератора 7. Способ осуществляют следующим образом. Преобразователь 1 (фиг. 2) преобразует магнитное поле в ЭДС, пропор циональную производной от поля по времени, ключ 2 выполняет операцию отсечки части сигнала преобразователя, интегратор 3 - операцию интегрирования отсеченных сигналов. Блок 5 фиксируют передний фронт сигналов пупутем генерации импульса в момент появления сигналов. Этим импульсом запускается блок б, вьтолняющий Функ7 цию задержки. Задним фронтом импульса блока б запускается, в зависимости от состояния триггера 9, либо генератор.7, либо генератор 8. Для , определенности положим, что триггер запреща:ет прохождение импульса через элемент И 11. В этом случае генератор 7 запускается непосредственно от блока б в момент окончания задерж ки и интегрируется часть сигнала преобразователя 1 от момента t в течение фиксированного интервала, по окончании которого задним фронтом импульса генератора 7 триггер перебрасывается в другое положение, запрещающее прохождение импульса блока б через элемент И 10 и разрешающее через элемент И 11. С приходом второго импульса поля блок 5 запускает блок 6, который по окончании интервала задержки запускает генератор 8 дополнительной задержки. Последний генерирует импульс длительностью Т - t, где Т - период повторения поля. Задним Фронтом импульса запускается генератор 7 11..ключ 2 замыкается с опережением по отношению к переднему фронту третьего сигнала. Интегрируется часть третьего сигнала от переднего фронта до момента задержки. D момент задержки задним фронтом импульса генератора 7 триггер 9 перебрасывается в исхбдное состояние, полготавливая схему к повторению цикла. Таким образом, назначение генератора . дополнительной задержки обесг1«мияает отсечку части сигнала от переднего фронта до момента задержки.
ПроцессИзмерения разбивается на два цикла. В первом цикле отсекается, интегрируется .и регистрируется задняя по отношению к моменту задержки часть сигналов, а во втором -.передняя часть сигналов. В первом цикле жестко фиксируется начальный момент интегрирования, равный tj., во втором цикле - конечный момент интегрирования, также равный ti. На этом процесс измерения заканчивается и величина индукции магнитного поля вычисляется по формуле
и,)С
SW
B(t) (U| - -.. , где .) - значение индукции в
момент t,
и , Ui - величина регистрируемых сигналов на первом и втором циклах
- постоянная интегратора}
5w - постоянная преобразователя.
0 Преимущества предлагаемых способа и устройства заключаются в упрощении процесса измерений посредством исключения операции подстройки дрейфа нуля.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительная техника | |||
| Под ред | |||
| Е.Т | |||
| Шрамкова | |||
| М., 1972, с | |||
| СКИПОВЫЙ ПОДЪЕМНИК ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕДВИЖНЫХ БЕТОНОУКЛАДЧИКОВ™ШШН1ХШкдБИБЛИО7?МА | 0 |
|
SU359361A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приборы и техника эксперимента, 1976, 5, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
