Изобретение относится к кике и может быть использовано при i создании систем тeJ Ieyпpaвлeния машинами и механизмами с переносного (пе редвижно1чэ) пульта управления по дву проводной линии связи. Известна система телемеханическог управления передвижной секций шахтной гидрокрепи, состоящая из пульта управления (ПУ), содержащего распределитель, ключи травления и формирователь сигналов телеуправления, контролируемого пункта (КП), содержащего распределитель и приемник сигналов телеуправления, проводной линии связи меявду ПУ и КПг и вклкучакидая источник питания, тактовый генератор, формирователь тактовых импульсов, формирователь синхроимпульса Иблок памяти Наиболее близкой по технической сущности к предлагаемой является система телемеханики, содержащая на пульте управления ведомый распредели тель, выходы которого соединены соответственно с входом блока управления, блок синхронизации и синфазирования (приемный узел пульта управления), первый выход которого подключе к первому входу ведомого распределителя импульсов. На контролируемом пункте в системе имеется ведущий рас пределитель импульсов, приемник сигналов телеуправления (приемный узел блок памяти, формирователь синхроимпульса (пёреданнций узел контролируеМого пункта), к первому входу которого подключен первый выход веду111его распределителя, формирователь так товых импульсов, источник питания и генератор тактовых импульсов. Передача тактовых импульсов к распределителям осуществляется по отдельной сети питания Г21. Недостатками известных систем телемеханики является то, что при наличии в линии связи утечек между жилами кабеля, вызванных ухудшением качества или нарушением изоляции, снижается помехоустойчивость системы и достоверность передачи информации, так как напряжение с тактовых шин через сопротивление утечки, минуя контакты Датчиков, поступает на шины телесигнализации и воспринимается входными устройствами как сигнал срабатывания датчиков. Для подачи напряжения питания на объекты управления должна быть предусмотрена дополнительная жила кабеля. Кроме того недостатками системы являются большое количество жил лиг НИИ связи и недостаточнгш помехозащищенность системы передачи информации, особенно в условиях агрессивной среды и высоких механических нагрузо на линию связи, что снижает надеж ность функционирования системы. Цель изобретения - упроще41ие системы путем сокращения/проводов линии связи, что приводит к повышению помехозащищенности системы передачи сигналов телеуправления. Поставленная цель достигается тем, что в системе телемеханики, содержащей на пункте управления ведо1шй распределитель, выходы которого соединены соответственно с входами бЛока ключей управления, блок синхронизации и синфазирования, первый выход которого подключен к первому входу ведомого распределителя импульсов, первый и второй входы- блока синхронизации и синфазирования соединены с линией связи, на контролируемом пункте содержащая ведущий распределитель импульсов, приемник сигналов телеуправления блок памяти, к первым входам которого подключены соответственно выходы ведущего распределителя импульсов, формирователь синхроимпуль са, к первому входу которого подключен первый выход ведущего распределителя, формирователь тактовых импульсов источник питания и генератор тактовых импульсов, на пункте управления введен выпрямитель, формирователь сигналов телеуправления, содержащий высокочастотный генератор импульсов, элемент И, нагрузочный элемент и ключ, выход высокочастотного генератора импульсов подключен к первому входу элемента И, выход которого подключен к первому входу ключа, к второму входу которого подключен выход элемента нагрузки, к входу которого подключен первый выход выпрямителя, второй выход которого соединен с выходом ключа Формирователя сигналов телеуправления, второй вход элемента И которого соеди- , ней с выходом блока ключей управлеиия, второй выход блока синхронизации и синфазирования соединен с вторым . входом ведомого распределителя импульсов, входы выпрямителя соединены с линией связи, на контролируемом пункте приемник сигналов телеуправления содержит датчик тока, селектор сигналов телеуправления и детектор, первый выход датчика тока через селектор сигналов телеуправления соединен с входом детектора, выход которого соединен с вторым входом блока памяти, второй выход датчика тока приемника сигналов телеуправления соединен с первым входом формирователя тактовых импульсов, к второму входу которого подключен выхсЗд формирователя синхроимпульсов, к второму входу которого подключен генератор тактовых импульсов. Выход источника питания соединен с входом датчика тока приемника сигналов телеуправления выход формирователя синхроимпульса подключен к входу ведущего распределителя импульсов, выходы формирователя тактовых импульсов соединены с линией связи.
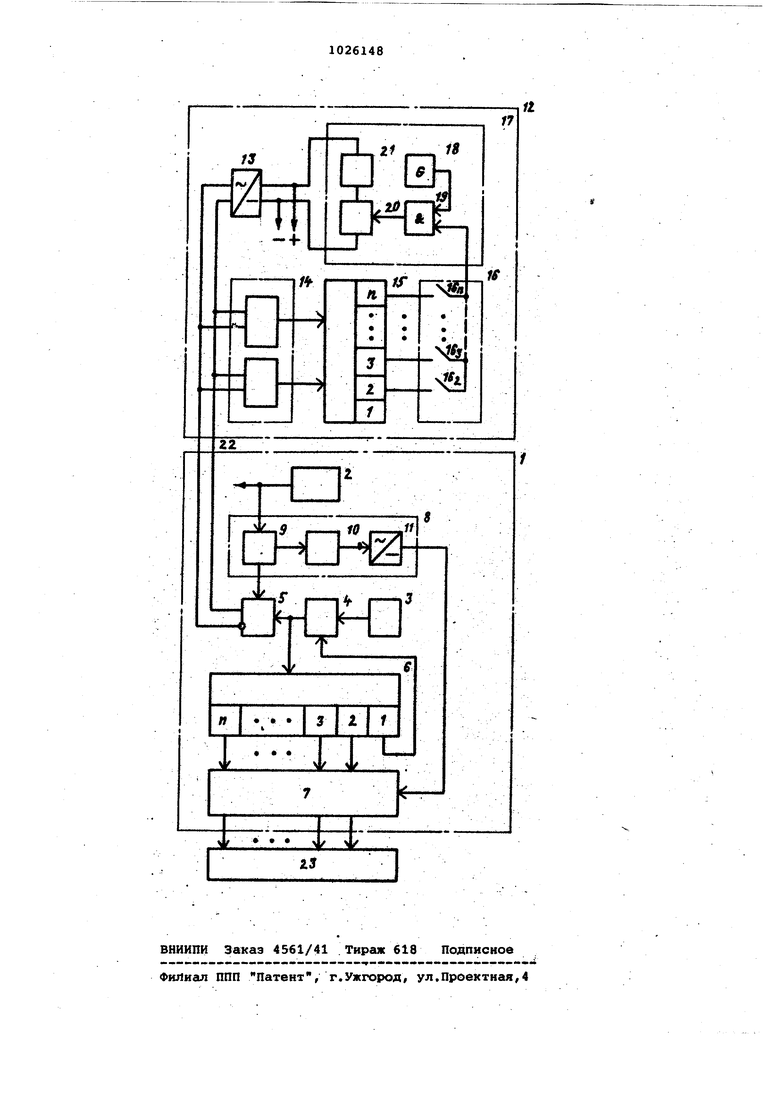
На чертеже приведена блок-схема системы телемеханики. ,
Система состоит из койтролируемого пунта 1, содержа1аего источник 2 питания, генератор 3 тактовых иМпульСРВ, формирователь 4 синхроимпульса, формирователь 5 тактовых импульсов, ведущий распределитель б, блок 7 памяти, приемник 8 сигналов телеуправления, включающий датчик 9 тока, селектор 10 сигнала и детектор 11, из пункта 12 управления, содержащего выпрямитель 13, блок 14 синхронизации и синфазирования распределителя, ведок&:1й распределитель 15, ключи 16. управления, формирователь 17 сигналов телеуправления, включакяций высокочастотный генератор 18 импульсов элемент 19 И, ключ 20, нагрузочный злемепт 21,. а также из проводной линии 22 связи между ПУ и КП и объектов 23 управления
Система работает следующим образом.
г При подаче напряжения питания запускается генератор 3, вырабатывающий последовательность импульсов определенной частоты, которая через формирователь 4 поступает на вход формирователя 5, вырабатывающего на своих прямом и инверсном выходах две последовательности тактовых импульсо котрЕиле осуществляют передачу по приводной линии 22 связи информации о выборе опрашиваемого ключа и энергии питания сКП 1и ПУ 12, а на вход ведущего распределителя 6, первый выход которого соединен с управпл-чхацал входом формирователя 4, вьтрл иенного, например в 0иде модулятора длительности первого такта в цакле, за счет чего происходит синфазирование распределителей € и 15. Блок 14 вьа пеляет этот синхроимпульс и через .первый выход подаеГ его на первый вход распределителя 15 принудительно устанавливая его в исходное (первое) положение в начале каждого цикла. Продвижение ведомого распределителя 15 осуществляется тем же блоке 14, вырабатывающим на своем втором выходе, связанном с вторым входом ра пределителя 15, импульсы продвижения на каждом из фронтов тактовых иМпуЛьсов. Питание электронной аппаратуры ПУ 12 осуществляется от выпрямителя 13, подключенного к жилам линии 22 связи .
Такой способ организации селекторного канала ведет к уменьшению количества жил линии связи до двух за счет исключения отдельной жилы для передачи синхроимпульса и введением для этого дополнительного признака.
При замцкании какого-либо из ключей , управления сигнал с выхода 1 аспределителя на соответствующей временной позиции поступает на первый вход элемента 19, на второй вход которого подается сигнал высокочастотного генератора 18. Выходной сигнал элемента 19 является управляющим для ключа 20, подключающего нагрузочный элемент 21 с частотой высокочастотного генератора 18 к линии 22 связи через выпрямитель 13 на данной временной позиции.
На выходе датчика 9, включенного последовательно в цепь питания формирователя 5, появляется пульсирующе с частотой высокочастотного генератора 19 напряжение, вызванное протеканием тока от комк тации нагрузочнох го элемента 21. Напряжение с выхода датчика 9 через селектор 10 и детектор 1-1 подается на информационный вход блока 7, на другие входы которого приходят сигналы со всех позиций ведомого распределителя 6, кроме первой. Выходы блока 7 подключены к объектам 23 управления.
В предлагаемой телемеханической системе применительно к рассредоточенным объектам для передачи сигналов при замыкании кнопок используются жилы питания, а в базовой аппаратуре при размыкании датчиков - отдельные жилы кабеля. Поэтому положительный эффект достигается за счет повышения надежности линии связи при некотором аппарат5Фном усложнении приемно-передающих компонентов.
Применительно к сосредоточенным (локальНьм) объектам, например, угледобывающим машинам, в которых.упрашяение ведётся по вспомогательным жилам силового кабеля базовая аппаратура не может быть использована вследствие ограниченного количества жил управления силового кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики | 1981 |
|
SU1042061A1 |
| Система телемеханики | 1983 |
|
SU1140142A1 |
| Многоканальная время-импульсная телеизмерительная система | 1984 |
|
SU1288738A1 |
| Система телемеханики | 1981 |
|
SU1005142A1 |
| Телемеханическая система | 1983 |
|
SU1211783A1 |
| Формирователь тактовых импульсов | 1980 |
|
SU868994A1 |
| Устройство для управления объектами | 1991 |
|
SU1837350A1 |
| Многоканальная система телемеханики | 1982 |
|
SU1170481A1 |
| Диспетчерский комплект системы многоканальной телеметрии | 1984 |
|
SU1322350A1 |
| Телемеханическая система | 1975 |
|
SU610099A1 |
СИСТЕМА ТЕЛЕМЕХАНИКИ, содержащая на пункте управления ведомый распределитель импульсов выходы которого соединены соответственно с .входами ключей управления, формирователя сигналов телеуправления, блок синхронизации и синфазирования, первый выход- которого подключен к первому входу ведомого распределителя импульсов, первый и второй входы 5ло. ка синхронизации и синфазирования соединены с линией связи , на контролируемом пункте содержащая ведущий распределитель импульсов, приемник сигналов телеупр1авленйя, блок.памяти к первым входам которого подключены соответственно выход1Ы ведущего рас|.пределителя импульсов, формирователь синхроимпульса, к первому входу которого подключен первый выход ведущего раопределителя импульсов, формирователь тактовых импульсов, источник питания и зтенератор тактовых импульсов, отличающаяся тем, 4TOj- с целью упрощения системы пу- тем сокршпения проводов линии связи, на пункте управления введен выпрямитель , формирователь сигналов телеуправления содержит высокочастотный генератор .импульсов, элемент И, нагрузочный элемент и ключ, выход высокочастотного генератора импульсов подключен к первому входу элемента И, выход которого подключен к первому входу ключа, к второму входу которого подключен выход элемента нагрузки, к входу которого подключен первый выход выпрямителя, второй выход которого соединен с выходом ключа, формирователя сигналов телеуправления/ второй вход элемента И которого соединён с выходом блока ключей управления, второй выход бло- 18 ка синхронизации и синфазирования (П соединен с вторым входом ведомого распределителя импульсов, входы выпрямителя соединены с линией связи, н контролируемом пунктеприемник сигналов телеуправления содержит дат-5 чик тока, селектор сигналов телеуп.равления- и детектор, первый выход датчика тока через селектор сигналов телеуправления соединен с входом детектора, выход которого соединен с вторым входом блока памяти, второй выход датчика тока приемника сигналов телеуправления соединен с первым входом формирователя тактовых импуль сов, к второму входу которого подклю чен выход формирователя синхроимпуль са, к второму входу которого подключен генератор тактовых импульсов, выход источника питания соединен с входом датчика тока приемника сигналов телеуправления, выход формирователя синхроимпульса подключен к входу ведущего распределителя импульсов, выходы формирователя тактовых импульсов соединены с линией связи.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабинович М.С.,Красин Я.Л., и др | |||
| Элементы и систелал автоматического управления гидрофицированными крепями | |||
| М., Недра , 1977, с | |||
| Способ добывания бензина и иных продуктов из нефти, нефтяных остатков и пр. | 0 |
|
SU211A1 |
| Телемеханика | |||
| М., Энергия% 1973, с | |||
| Способ амидирования жидких сульфохлоридов ароматического ряда | 1921 |
|
SU316A1 |
