второй выход первого блока управления записью измеренных временных ин тервалов соединен с вторым входом второго блока управления записью измерепных временных иптервялов, второй выход которого соедине: с вторым входом третьего блока управления записью измеренных временных интервалов.



СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ МЕСТНОСТИ, содержащая передатчик сколлимированного луча : лазерного и:злученйя с устройством круговой развертки луча и приемное устройство, включакицее преобразователь излучения передатчика, выход которого соединен с входом согласующего блока, и два счетчика импульсрв, о т л и ч а ю щ а я с я тем, что, с .целью повыщения точности определения координат объектов местности, в нее введены два дополнительных передатчика сколлимированных лучей лазерного излучения с устройством круговой развертки лучей и три модулятора,выт ходы которых соединены с входами соответствующих передатчиков сколлими-. рованных лучей лазерного излучения, а в приемное устройство введены три разделительных фильтра, три формирователя временных интервалов, три формирователя счетньпс импульсов, дополнительный счетчик импульсов, формирователь импульса управления, электрон-; ные часы, генератор тактовых импульсов, блок управления записью показаний электронных часов, три блока управления записью измеренных временных интервалов и регистрирующий блок,при этом выход согласующего блока соединен с входамитрех paзjE eлитeльныx фильтров, выход первого разделительного фильтра соединен с входом формирователя импульса управления к с первым .и вторым входами соответственно nepBoroi и третьего формирователей временных: интервалов, выход второго разделительного фильтра соединен с первым и вторьм входами соответственно второго и первого формирователей временных интервалов, а выход третьего разделительного фильтра соединен с первым и вторым входами соответственно третьего и второго формирователей временных интервалов,.выходы формироS вателей временных интервалов через (Л соответствующие формирователи счетных импульсов соединены с входами соответствующих счетчиков импульсов, при этом выход генератора тактовых импульсов соединен с входом электронных часов и вторыми входами первого,второго третьего формирователей счетных импульсов , а выход формирователя импуль-. са управления соединен с управляющим входом управления записью показаний электронных часов, другой вход блока управления записью показаний электронных часов соединен с выходом электронных часов, а в| 1ходы.блока управления записью показаний электронных часов соединены с первым входом регистрирующего блока и управляющим входом первого блока управления записью измеренных временных интервалов, выходы счетчиков импульсов через соответствующие блоки управления записью измеренных временных интервалов соединены с вторым, трет,ьим и четвертым входами регистрирующего блока, а
Изобретение относится к навигационным системам и может использоваться при определении геодезических координат объектов местности при. производстве топографических работ. 5
Известна система для определения оординат объектов местности, содеращая передатчик сколлимированного уча лазерного излучения с устройстом круговой развертки луча и прием- Ю ное устройство, включающее преобразователь излучения передатчика, выход которого, соединен с входом согласуюего блока, и два счетчика. Система позволяет определять координаты объ- 5 актов местности независимо от метео рологических условий и отсутствия прямой видимости между объектами местности..
Однако эта система не обеспечива- 20 ет достаточной точности определения координат объектов местности при расстояниях между передатчиком лазерного излучателя и приемников более 100150 м.
Цель изобретения - повышение точности определения координат объектов местности.
.Для этого в систему для определения координат объектов местности, 30 содержащую передатчик сколлимированного луча лазерного излучения с устройством круговой развертки луча и приемное устройство, включающее преобразователь излучения передатчика, 35 выход которого соединен с входом согласующего блока, и два счетчика импульсов, введены два дополнительных передатчика сколлимированных лучей лазерного излучения с устройст- дО вами круговой развертки лучей и три модулятора, выходы которых соединены с входами соответствующих передатчиков сколлимированных лучей лазерного излучения, а в приемное устройство 45 введены три разделительных фильтра.
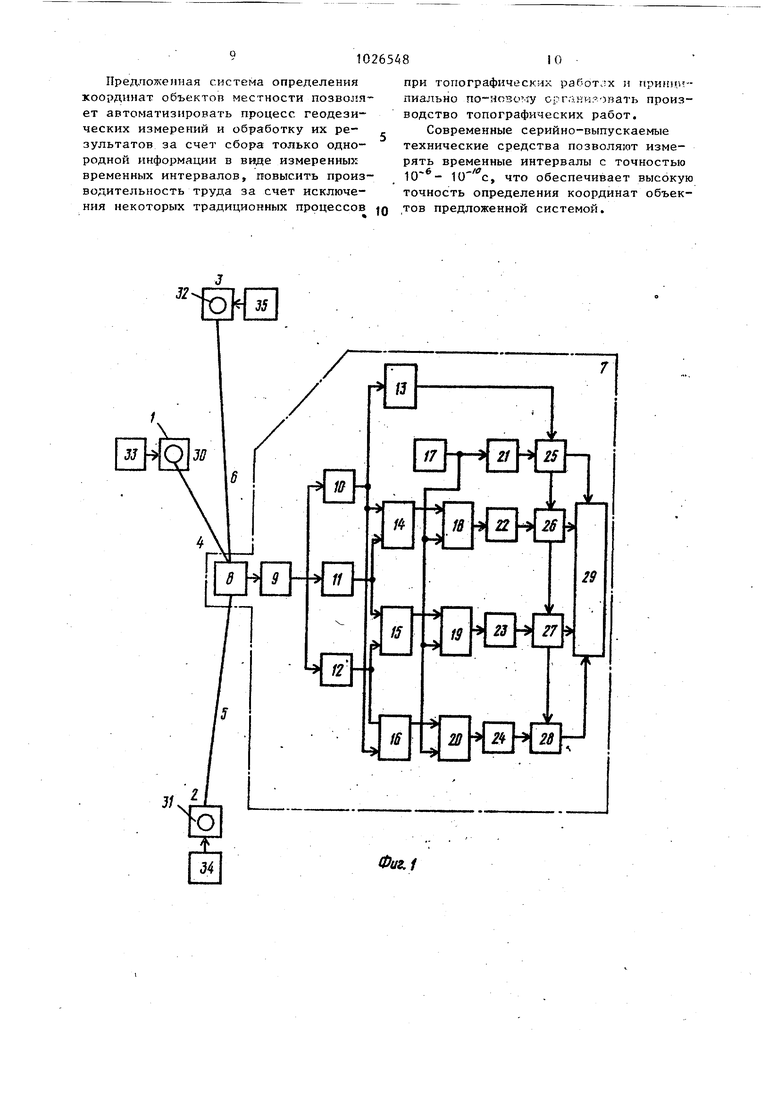
три формирователя временных интервалов , три формирователя счетных импульсов, дополнительный счетчик импульсов,- формирователь импульса управления, электронные часы, генератор тактовых импульсов, блок управления . записью-показаний электронных часов, три блока управления записью измеренных временных интервалов и регистрирующий блок, при этом выход согласующего блока соединен с входами трех разделительных фильтров, выход первого разделительного фильтра соединен с входом формирователя импульса управления и с первым и вторым входами соответственно первого и третьего формирователей временных интервалов, вьпсод второго разделительного фильтра соединен с первым и вторым входами соответственно второго и первого формирователей временных интервалов, а выход третьего разделительного фильтра соединен с первым и вторым входами соответственно третьего и второго формирователей временных интервалов, выходы формирователей временных интервалов через соответствующие формирователи счетных импульсов соединены с входами соответствующих счетчиков импульсов, при этом выход генератора тактовых импульсов соединен с входом электронных часов и вторыми- входами первого, второго и третьего формирователей Счетных импульсов, а выход формирователя импульса управления соединен с управляющим входом блока управления записью показаний .электронных часов, другой вход блока управления записью показаний электронных часов соединен с выходом электронных часов;. а выходы блока управления записью показаний электронных часов соединены с первым входом регистрирующего блока и у11рав.ляющим входом первог0 блока управления записью измеренных временных интерна.;1он, выходы счетчиков импульсов через соответствующие блоки управления записью измеренных вре.менных интервалов соединены с вторым, третьим и четвертым входами регистрирующего блока, а второй выход первого блока управления записью измеренных временных интервалов соединен с вторым входом второго блока управления записью измеренных временных интерзалов, второй выход которого соединен с вторым входом третье го блока управления записью измеренных временных интервалов. На фиг. 1 приведена блок-схема системы для определения координат объектов местности; на фиг. 2 - схема определения угла при определяемом объекте; на фиг. 3 - схема установки нэ местности системы для определения координат объекта. Система для определения координат объектов местности (фиг. 1) содержит три передатчика 1, 2, 3 скол лимированных лучей 4, 5, 6 лазерного излучения и приемное устройство 7, включающее преобразователь 8 излучения передатчика, согласующий блок 9, три разделительных фильтра 10, 11, 12, формирователь 13 импульса управления, три формирователя 14, 15, 16временных интервалов, генератор 17тактовых импульсов, три формирова теля 18, 19, 20 тактовых импульсов, электронные часы 21, три счетчика 22, 23, 24 импульсов, блок 25 управления записью показаний электронных часов, три блока 26, 27, 28 управления записью измеренных временных ин.тервалов, регистрирующий блок 29, устройства 30, 31, 32 круговой развертки лучей и модуляторы 33, 34,35, Система .работает следующим образом. Лазерное излучение передатчика 1 модулируется сигналом с частотой f с помощью модулятора 33, излу,чение передатчика 2 модулируется сигналом с частотой 2 помощью модулятора 34, а излучение передатчика 3 - сигналом с частотой fa с помощью модуля тора 35. Модулирующие частоты f, 3 выбираются близкими по спектру с условием устойчивого разделения их в приемном устройстве. Преобразователь 8 приемного устройства 7 имее круговую диаграмму направленности. Полоса пропускания согласующего блок 9 достаточно широка для прохождения спектра модулирующих частот передатчиков 1, 2 и 3. Разделительный фильтр 10 настроен на частоту модуляции f излучения передатчика 1, разделительный фильтр 11 настроен на частоту модуляции fj излучения передатчика 2, а разделительный фильтр 12 - на частоту модуляции 1:з излучения передатчика 3. Формирователь 13 импульса управления вырабатывает импульсный сигнал, задержанной на величину длительности записи временного интервала, измеренного счетчиком 24 импульсив. Длительность импульса управления выбир ается с учетом времени, необходимого дЛя записи показан15Й электронных часов 21. Генератор 17 тактовых импульсов обеспечивает стабильность частоты на хуже чем 10 . Регистрирующий блок 29 позволяет записывать любое значение показаний счетчиков 22,23, 24 и электронных часов 21. Сколлимированные лучи 4, 5, б передатчиков 1, 2 и 3, вращаясь с определенной частотой и фазой по горизонту, пересекают приемное устройство 7, установленное на любом объекте местности, например в точке А (фиг. 3). Принятые преобразователем 8 сигналы, пройдя через согласующий .блок 9, поступают на входы разделительных фильтров 10, 11 и 12. Сигнал от передатчика 1 вьщелится на выходе разделительного, фильтра 10 в виде импульса, с помощью которого формируется импульс управления записи показаний электронных часов в формирователе 13 и включается счетчик 22 импульсов, который ведет счет поступающих с генератора 17 через формирователь 18 счетных импульсов. Сигнал с передатчика 2 выделится на выходе разделительного фильтра 11 в виде импульса, с помощью которого выключается счетчик 22 и включается счетчик 23.Сигнал с передатчика 3 вьщелится на выходе разделительного фильтра 12 также в ,виде импульса, с помощью которого выключается счетчик 23 и включается счетчик.24. Для выключения счетчика 24 необходим вторичный приход сигнала от передатчика 1. Таким образом в счетчике 22 измеряется вре менной интервал между приходом лучей 4 и 5 передатчиков и 2 (/)j в счетчике 23 измеряется временной интервал между приходом лучей 5 и 6 2 и 3 (Т. ), а в счетчипередатчиковК€ 24 измеряется « каменной интервал между приходом лучер1 6 и А передатчи ков 3 н 1 (, у, ). Одновременно с этим сформированный управляющий импульс с выхода формирователя 13, поступив на управляющий вход блока 25, даст разрешение на запись показаний электронных часов 21. При этом формирователь 13 импульса управления формирует управляющим импульс задержанным на время, необходимое для записи показаний временного интервала Tj, , Величина задержки постоянна и легко учитывается путем введения поправки в зафиксированное значение показаний злектронных часов.-Блок 25 управления записью показаний электронных часов по окончании записи формирует управляющий импульс, который подается на управляющий вход блока 26 и разрешает запись на технический носитель регистрирующего блока 29 измеренного вреСменного интервала t при завершении счета в счетчике импульсов 22, Блок 26управления записью при завершении записи временного интервала |2 формирует управляющий импульс, который подается на управляющий вХод блока 27и разрешает запись на технический носитель регистрирующего блока 29 измеренного временного интервала при заверщении счета п счетчике 23, а блок 27 управления записью по окончании процесса записи временного интервала 2з Формирует управляющий импульс, который подается на управляющий вход блока 28 и разрешает запись на технический носитель регистрирующего блока 29 измеренного временного интервала Tj по окончании счета в счетчике 24. Таким образом на магнитную ленту блока 29 записываются показания электронных часов 21 на момент прихода сигнала с передатчика 1 а также измеренный временной интервал t,2 затем измеренный временной интервал 1,, и Г,/ . По окончании процес 23 ЗI са записи цикл измерений может быть повторен многократно на любом другом объекте. Аналогичным образом ведут измерения и на дру1их объектах местности. Магнитную ленту с зарегистрированными виодят и ЭВМ и обрабатывают. Углы при опсрпых точках определяют следующим )ом. Например, иг) фмг, 2 приведена схема определения ут-;. jipii очке А по108 средством разнертьпиишя двух сколлимиронанных лучей 4 и 3 передатчиков 1 и 2, установленных на двух точках местности, С помощью приемного устройства 7, установленного ия точке А, регистрируют моменты прохождения лучей 4 и 5, вращающихся с одинаковой частотой UJ . В момент включения пе4 и 5 занимали 2 лучи редатчиков 1 и положение li начальные фазы опорных плоскостей). Для удобства . вывода произведем некоторые дополнительные построения: выполним параллельный перенос в точку установки передатчика 2 направления f луча 4 и продолжим луч 5. Найдем временной интервал между моментами прихода лучей 3 и 4 на приемное устройство, установленное в точке А де t и моменты прихода лучей 4 и 5 на приемное устройство в точке А. Выразим угол А- через измеренный временной интервал л/и начальную разность фазд. В соответствии с фиг. 2 можно записатьС (ГЛ Cj - С где cf временной интервал, соответствующий повороту луча 4 от направления V/ до направления на точку А; Са временной интервал, соответствующий повороту луча 5 от начального направления У до направления на точку А. Следовательно,2/ (-.(vii , гпеи/с ЛУ2/ dу| - начальная разность фаз; а А, - угол между направлениями на второй и первый передатТогда tcC.j, лС+и/ / - А,-wi/ Л -Ь ,0 1.Г, av.r - А,. + 2ft В полученном выражерп1и и V и неизвестные. Для определения неизвестных уравнений (3) необходимо устапонить функциональную зависимост)) между систе.мой координат опорных точок и гигтймой координат измерений, пля чот-о состав.Г1яют систему уг.чопмых урпяпспиГг (фиг. и).
1 ,2. 2- , +
, А|г А,, .V B,z- В,, , С,, СзЛ . где at/.v , 4 V начальные разно 1 2j 3/ ти фаз, лучей ра верток; AJ. . В. t - угловые расстоя ния между точкам установок пере. датчиков 1,2,3 с пунктов А, В, С . В системе условных уравнений 4) двенадцать уравнений с двенадцатью неизвестными которые определяются из совмесуного решения уравнений системы (4). Определив неизнестные матрицы М, решают систему уравнений IAB V- сд Aij- А„- С,„ 2 - АЗ, - B,i , 2вс-ь 2 2вс 3„ 25Г- Aj,- B,j - Вз,/6 2рс- 3;,g+ Зев- 2Й- B,j- Вз, - Cj Здв+ Зсд В,( - С,2- Сгз, IAB вс- 2сА+ Зд8 + А ,j- А,, - В, Bj, - C,i - Cfj, составленную в соответствии с типовыми условиями фигур (фиг. 3),где :А.углы при точках установок передатчиков 1, 2, 3 на соответствующие опориые точки местности. Составляют систему линейных уравнений для каждого опорного пункта, т.е. систему,условных уравнений так называемой вставки в жесткий угол
ie 8i V Bi- АЗС Ag Зс ei 31 Aie- А, 21Г- А, с BS/ Ве « в, в,, В.. + ВА2 В, В,л+ В,, + В..+ Вд2 В,,,. G«t Сц, /дг 28° Лв iu В3 23 - С,д Сд,+ С,+ С 21;- С,,, где Ajjj ......... Взс........ Свзуглы при опорных точках. Определив из решения системы 4,7) углы между направлениями, образованные на опорные пункты, имеющие известные геодезические координаты х, у, и направлениями на точки установки передатчиков 1, 2, 3 по известнь1м в геодезии формулам, например по фор-мулам прямой засечки, вычисляют геодезические координаты точек установок передатчиков 1, 2, 3. По измереннь1м време:нным интервалам f, 2 t на объекте N и ранее вычисленным лч,Л fнл f находят углы при точке N (. Nj3 C 3, -«/.„+ 2//. По вычисленным геодезическим координатам точек установок передатчиков 1, 2, 3 и углам при объекте N--, решая треугольйики по известным формулам, вычисляют координаты х, у объекта N.. Последовательность установки приемного устройства на опорные точки и объекты местности может быть и другой и зависит от местных условий, то есть, установку приемного устройства на объекты местности и опорные точки выполняют .в любой последовательности.
Предложенная система определения хоординат объектов местности позволяет автоматизировать процесс геодезических измерений и обработку их результатов за счет сбора только однородной информации в виде измеренных временных интервалов, повысить производительность труда за счет исключения некоторых традиционных процессов
при топографических работлх п принципиально .ту орг.з.ки.-овать производство топографических работ.
Современные серийно-выпускаемые технические средства позволяют измерять временные интервалы с точностью , что обеспечивает высокую точность определения координат объектов предложенной системой.
Фaг,t
/
| Патент США № 3714657, кл, G 01 S 1/54, опублик | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
