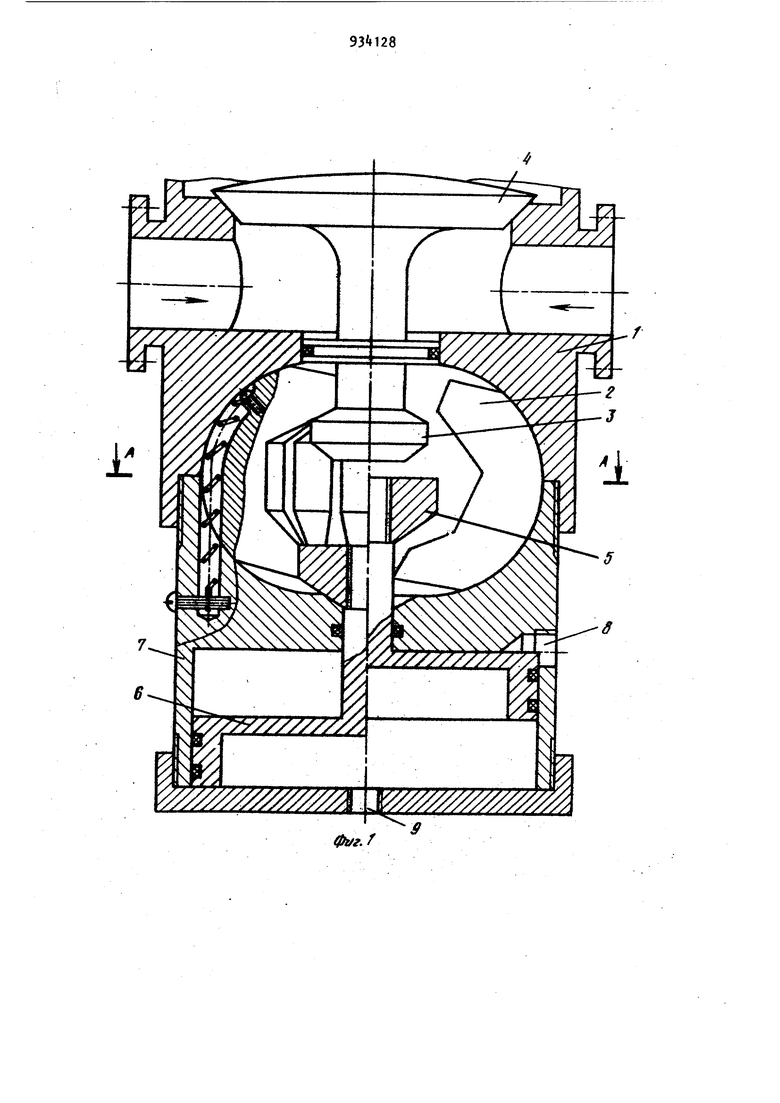
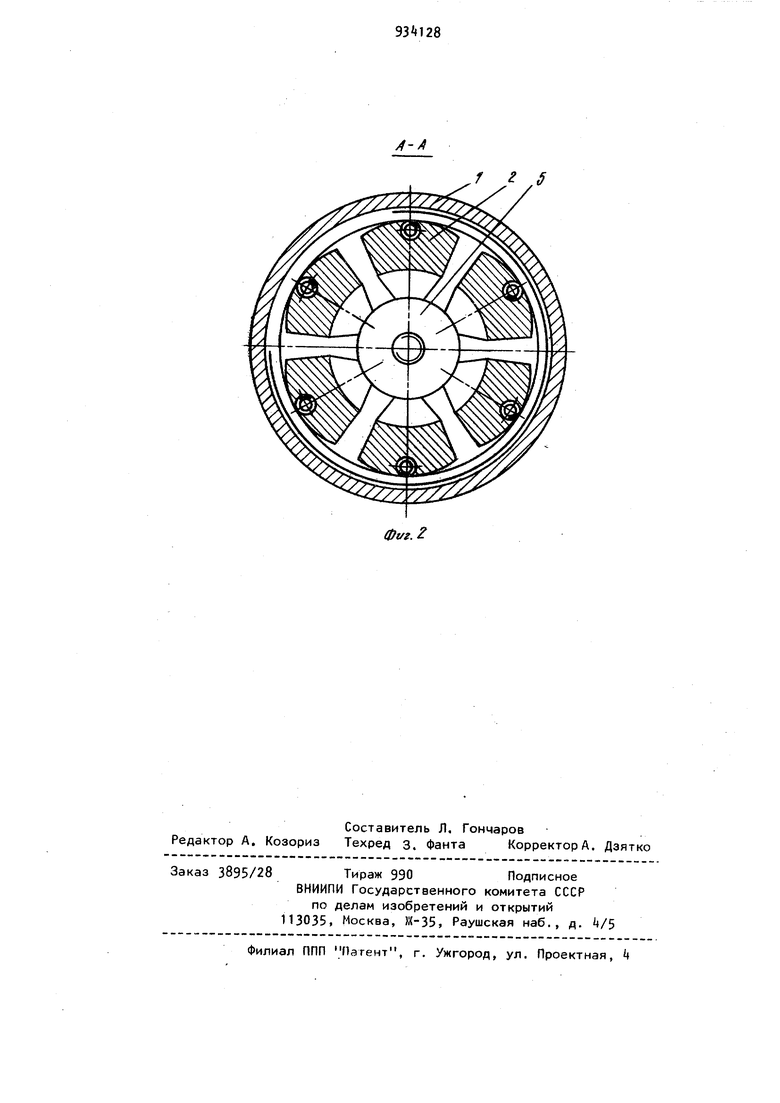
Изобретение относится к арматурестроению, а именно к приводам пневмо гидравлических клапанов. Известен механический привод уси- лительного механизма с силовыми захватами, выполненными в виде крюков Недостатком данного привода является узкая область его применения в связи с тем, что он обладает небольшими усилиями удержания, а также бол шими габаритами и массой. Наиболее близким техническим реше нием является механический привод, содержащий корпус, в котором размеще ны силовые захваты, взаимодействующие с головкой штока запорного элемента и с распорным звеном 2 J. Недостатками известного привода является узкий эксплуатационный дип апазон по силам удержания, который обусловлен тем, что силовые захваты (рычаги) в приводе работают на срез и изгиб. Известный привод также не позволяет обеспечить автоматическое взведение запорного органа после срабатывания. Цель изобретения - расширение эксплуатационного диапазона и обеспечение автоматизации взведения привода. Указанная цель достигается тем, что силовые захваты выполнены в виде сухарей, являющихся секторами тора, и внутренняя поверхность корпуса выполнена торовой, больший диаметр которой больше соответствующего диаметра торовой поверхности сухарей. Кроме того, распорное звено выполнено в виде тела вращения, ось которого совпадает с осью привода. На фиг. 1 изображен механический привод, разрез; на фиг. 2 - разрез А-А на фиг. 1. Механический привод содержит корпус 1, в котором размещены подпружиненные силовые захваты 2, выполненные в виде сухарей, являющихся секторами тора. Захваты 2 взаимодействуют с головкой штока 3 запорного элемента и с распорным звеном S, выполненным в виде тела вращения, например в виде цилиндрической тарели, поверхность которой состоит из цилиндрической и конической поверхно стей. Распорное звено 5 связано с управляющим устройством, например поршнем 6 пневмоцилиндра 7, имеющего отверстия 8 и 9 для подачи давления воздуха. Внутренняя поверхность корпуса 1 выполнена торовой, причем ее больший диаметр больше соответствующего диаметра торовой поверхности за ватов 2. Механический привод работает следующим образом. При подаче давления в отверстие 8 поршень 6 перемещается вниз. Распорное звено 5 своей конической поверхностью воздействует на захваты 2, ко торые поворачиваются и захватывают головку штока 3 запорного элемента k Запорный элемент ft закрыт, причем захваты удерживаются благодаря взаимодействию с цилиндрической поверхностью звена 5. Для открытия запорно го элемента управляющее давление подается в отверстие 9. Поршёйь 6 пе ремещается вверх, распорное звено 5 выходит из взаимодействия с захватами 2, которые под действием пружин разворачиваются и освобождают головку штока 3. Запорный элемент 4 Откры вается. Во время работы привода захваты 2 и распорное звено 5 работают на смятие, а напряжение смятия для м териалов выше, чем напряжения среза и изгиба, благодаря чему оказывается возможным значительно расширить диапазон сил удержания. Разность диаметров торовых поверхностей захватов 2 и внутренней поверхности корпуоа t обеспечивает устранение эффекта замыкания захватов при взаимодействий их с корпусом при работе с максимальными смпамн удержания. Технико-экономический эффект пред лагаемого устройства заключается в расширении эксплуатационного диапазона и обеспечении автоматиз.ации взведения привода. Формула изобретения 1.Механический привод, содержащий корпус, в котором размещены силовые захваты, взаимодействующие с головкой штока запорного элемента и с распорным звеном отличающийся тем, что, с целью расширения эксплуатационного диапазона и автоматизации взведения привода, сиnoMie захваты выполнены в виде сухарей, явпмщихся секторами тора, а внутренняя поверхность корпуса выполнена торовой, больший диаметр которой больше соответствующего диаметра торовой поверхности сухарей. 2.Привод по п. 1, отличающийся тем, что распорное звено выполнено в виде тела вращения, ось которого совпадает с осью привода. Источники информации, принятые во внимание при экспертизе 1.Патент США W 2766631. кл. 7t-IIO, 1963. 2.Авторское свидетельство СССР IP 567003, кл. F 16 К 31/02, 1977.
f J
ф1/г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1981 |
|
SU1028936A2 |
| Механический привод | 1980 |
|
SU945572A1 |
| Механический привод | 1980 |
|
SU974009A1 |
| Механический привод | 1981 |
|
SU987255A1 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2019 |
|
RU2733632C2 |
| Механический замок | 1990 |
|
SU1762069A1 |
| Пневматический одноударный молоток | 1989 |
|
SU1712056A1 |
| Механизм расфиксации зацепляющего штыря имитатора отрывной платы | 2017 |
|
RU2681803C2 |
| Способ клепки и пневматический пресс для его осуществления | 1988 |
|
SU1602603A1 |
| ЗАХВАТ ШТОКОВОГО УСТРОЙСТВА ПОДВОДНОЙ ЛОДКИ | 2020 |
|
RU2748088C1 |