Изобретение слносится к механическим приводам с поступательным перемещением подвижного (отделяемого) органа, к которому приложена осевая сила, и может быть использовано is качестве приводов пневмо- гидравлических клапанов высокого давления в системах иожаротучиения, в общем и химическом машиностроении. В качестве жесткого механического привода (замка) вг)зможно применение н стреляющих пневмо- гидравлических 1ор1ннях, подъемно-транспортных механизмах и других отраслях народного хозяйства, 1 де требуется разъединение наг руженных осевой силой деталей.
и,ель из1)б Н тения - расширение :(ксплуа- тационных возможностей и повьииение надежности пугем увеличения верхнего предела диапазона cn;i удержания за счет перехода к плоскостным контактным нарам, уменьшения до ну.мя нижнего нредела диапа- зопа сил удержания за счет применения открывающих пружин, а также путем создания привода безуда|)ного типа с регулируемой
скоростью ОГК()Ы ГНЯ.
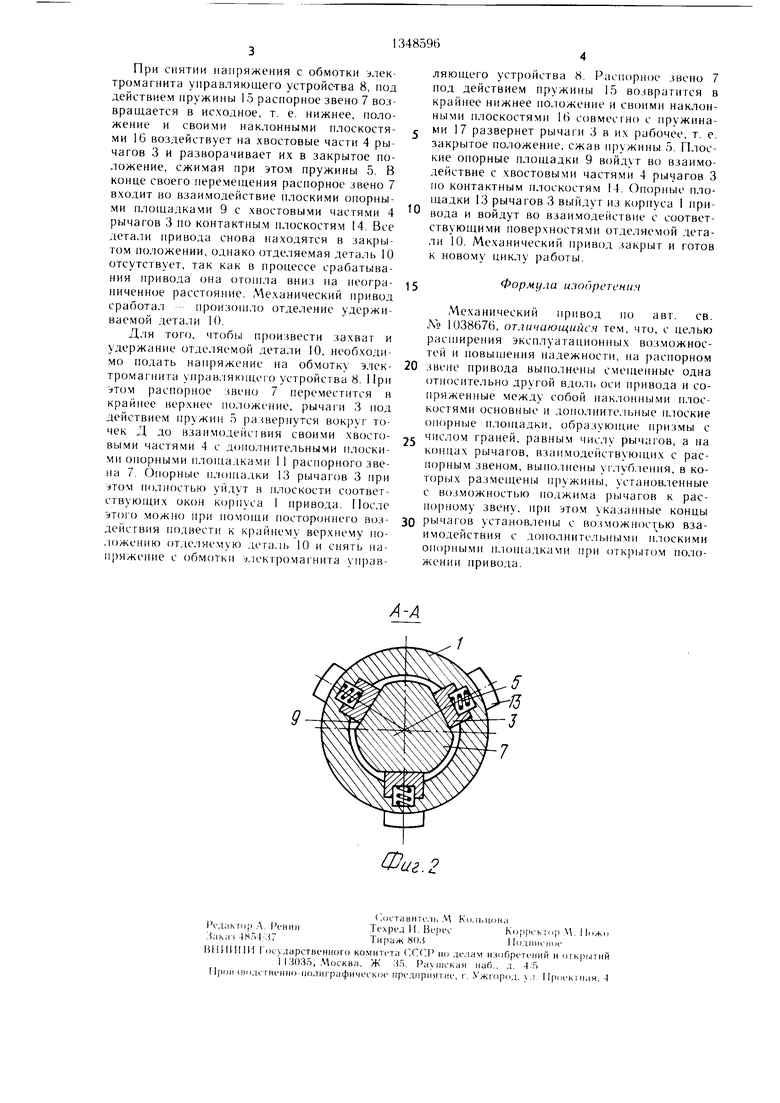
На фиг. 1 изображена конструктивная схема механического привода (левая половина (|)иг. 1 поясняет открытое положение привода в момент отхода отделяемой детали, а правая закрытое), общий вид в разрезе; на фи1. 2 раз)ез А-А (разрез привода, находяпи г)ся в закрытом положении, но бе i отделяемо д( га;1и) на фиг. I.
Д еханпческий 11)ивод имеет KO)iiyc 1 привода, KOTopbiii закреплен на корпусе 2 к, 1апана В корпусе 1 привода размени ны рычаги .. xFiocToBbie части 4 которых поджаты пружинами 5. устап(.)вленны.ми в соответствующих ни. 1ипдрических углублепнях 6, к распо|)ном 7, которое связано с унрав.1яюни1м устройством 8. Распорное звено 7 спабж.ено ос1И)вными плоскими опор ными нлоиинками 9, Корнус 1 привода расположен во вну rpcHtieii полости отделяемо15 детали К) и охна плвается ею. Кроме того, распорное знено 7 снабжено дополнптел.,- пыми плоскими )ыми площадка.ми 11. Рычаги .3 своими юловпыми частями, выпол- ненны.мп в виде пилппдрических поверхностей 12, взаимодействуют с соответствуюн1и- ми опорными поверхностями корпуса I 1ри- вода, опорными нло1падками 1,3, вынолнен- Н1,1ми под yi . ioM GC к плоскостп, перпендикулярной оси привода, н отделяемой .че- та лью И), а хвосювыми частями 4 но плоскостям 14 контактируют с основными нлос- кими опорными плоп1адками 9 распорного звена 7, подпружинено пружиной 15 относительно управляюп1его устройства 8. Основные oHopiibie п, ющадки 9 и до полпительные (июрные плоп1адки 11 сопряжены посредством иаклоппых плоскостей It). Пружипы 17. установленные между рыча- | ами 3, выполнены меньшей жесткости, чем пружины 5.
( новпые о.юрные площадки 9 и допол- 11пте.1ьпые (щпрпые п.пощадки 1 1 образуют
0
5
0
5
0
5
0
5
0
5
призмы с числом граней, равным числу рычагов 3.
Мехапический привод работает следующим образом.
В рабочем, т. е. закрытом, положении на отделяемую деталь 10 действует сила, возникающая в результате действия на отделяемую деталь (например тарель клапана) ВХОДП01Ч) давления Рвх (фиг. 1). Под действием (той силы отделяемая деталь 10 стремится отойти вниз. Однако такому переме- 1пепию препятствуют рычаги 3, опорные площадки 13 которых выступают за пре; лы KO|)iiyca 1 привода (фиг. 2) и удержива;.; -т- де.ляемую деталь 10 в крайнем верхнем положении. Так как опорные площадки 13 рычагов 3 выполнены под углом а, то в точках С (фи1. 1) происходит разложение си.:|. Под их действием и действием пружин 5 рычаги 3 стремятся развернуться вокруг точек Д (мгновенных центров врап1ения) своими хвостовыми частями 4 к оси привода. Однако такому развороту препятствует распорное звено 7, основные опорные площадки 9 кото- poi o пахс дятся во взаимодействии с хвостовыми частями 4 рычагов 3 по контактны.м плоскостям 14. Обмотка электромагнита ун- рии.1яюп1его устройства 8 при атом обесточена и распорное звено 7 поджато пружи- iKjii 15 в крайнее нижнее положение. Мехапический привод находится в закрытом по.южении. Происходит удержание отделяемой детали 10.
Л.ТЯ открытия привода достаточно подать напряжепие на электромагнит управляющего устройства 8. При этом якорь переместит в верхнее ноложение (левая половина фиг. 1) распорное звено 7, сжав пружину 15. После выхода плоских опорных 11, 1ощадок 9 из взаимодействия с хвостовыми частями 4 ры- чагоЕ 3 по плоскостям 14, рычаги 3 под действием сил давления Рих и сил пружин 5 по- ,|учан)г возможность развернуться вокру точек Л, сжимая пружинЬ) 17 и постоянно взаимодействуя при этом хвостовыми частями 4 с наклонными плоскостями 16 распорного звена 7. Скорость п у1ч)л разворота рычагов 3 определяются и обусловлены скоростью перемещения вверх распорного звена 7 и углом наклона к оси привода наклонных плоскостей 16. Размеры призмы, образованной донолнительныМи плоскими опор- пыми 11. 1О цадками 11, определяются услови- е.м полного выхода онорных пл лцадок 13 рычагов 3 из взаимодействия с отделяемой деталью 10. Таким образом, происходит безударное и управляемое (т. е. регулируемое как по скорости разворота, так и по углу поворота рычагов 3) открытие привода. После полпого выхода опорных 1тлощадок 13 рычагов 3 из взаимодействия с отделяемой деталью 10, последняя получает возможность отойти вниз под действием сил давления P«v В случае, когда , разворот рычагов 3 в процессе открытия привода происходит го„1ько лин1ь под действием пружин 5.
При снятии напряжения с обмотки алек- тромагнита управляющего устройства 8, под действием нружины 15 распорное звено 7 возвращается в исходное, т. е. нижнее, положение и своими наклонными плоскостя- ми 16 воздействует на хвостовые части 4 рычагов 3 и разворачивает их в закрытое положение, сжимая при этом пружины 5. В конце своего перемещения распорное звено 7 входит во взаимодействие плоскими опорными площадками 9 с хвостовыми частями 4 рычагов 3 по контактным плоскостям 14. Все детали привода снова находятся в закрытом положении, однако отделяемая деталь 10 отсутствует, так как в процессе срабатывания привода она отошла вниз на неогра- пиченное расстояние. ЛАеханический привод сработал произошло отделение удерживаемой детали К).
Для того, 4To6i)i произвести захват и удержание отделяемой детали 10, необходимо подать напряжение на обмотку элек- тромагнита унрав.мяющего устройства 8. При ытом распорное звено 7 переместится в крайнее верхнее положение, рычаги 3 под действием пружин 5 развернутся вокруг точек Д до взаимодейс1вия своими хвосто- выми частями 4 с дополнительными плоскими опорными площадками 1 1 распорного звена 7. Опорные площадки 13 рычагов 3 при утом полностью уйдут в плоскости соответствующих окон корпуса I привода. После этого можпо при помощи постороннего воз- действия подвести к крайнему верхнему по- .1оже}1ию отделяе.мую деталь 10 и С)1ять па- П1)яжение с обмотки (.юктромагпита управляющего устройства 8. Распорное звено 7 под действием пружины 15 возвратится в крайнее нижнее положение и своими наклонными плоскостями 16 совмесгно с пружинами 17 развернет рычаги 3 в их рабочее, т. е. закрытое положение, сжав пружины 5. Плоские опорные площадки 9 войдут во взаимодействие с хвостовы.ми частями 4 рычагов 3 по контактным плоскостям 14. Опорные площадки 13 рычагов 3 выйдут из корпуса 1 привода и войдут во взаимодействие с соответствующими поверхностями отделяемой детали 10. Механический привод закрыт и готов к новому циклу работы.
Формула изобретения
Механический привод но авт. св. Л 1038676, отличающийся тем, что, с целью расп ирения эксплуатационных возможностей и повышения надежности, на распорно.м звене привода выполнены смещенные одна относительно другой вдоль оси нривода и сопряженные между собой наклонпь |ми плоскостями основные и дополните.1ьпые плоские опорные площадки, образующие призмы с числом граней, равным числу рычагов, а на концах рычагов, взаимодействуюп1их с распорным звеном, вынолнены у| луб.1ения, в которых раз.мещены пружины, установленные с воз.можностью нодж+1ма рычагов к рас- по|1пому звену, при этом указанные концы рычаг ов установлены с возможност ью взаимодействия с дополнительными плоскими опорными п,()щадками при открьггом положении привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1982 |
|
SU1038676A1 |
| Механический привод | 1980 |
|
SU974009A1 |
| Механический привод | 1981 |
|
SU1028936A2 |
| Механический привод | 1980 |
|
SU945572A1 |
| Электромеханический привод | 1980 |
|
SU943462A2 |
| Механический привод | 1981 |
|
SU987255A1 |
| Механический замок | 1990 |
|
SU1762069A1 |
| НАКОНЕЧНИК-КАПКАН ГАРПУНА ДЛЯ ПОДВОДНОЙ ОХОТЫ (ВАРИАНТЫ) | 2006 |
|
RU2328851C2 |
| Устройство для соединения концов элементов с круглым поперечным сечением | 1990 |
|
SU1800171A1 |
| Механический привод | 1980 |
|
SU934128A1 |
Изобретение относится к механическим приводам с поступательным перемещением отделяемого органа, к которому приложена осевая сила, и может быть применено в качестве приводов пневмогидравличес- ки.х клапанов высокого давления в системах пожаротушения, в общем и химическом машиностроении. Целью изобретения является расширение эксплуатационных возможностей и повышение надежности путем увеличения верхнего предела диапазона сил удержания за счет перехода к плоскостным контактным парам, уменьп1ения до нуля нижнего предела диапазона си,1 удержания за счет применения открывающих нружин, а также |утем создания привода безударного типа с регу 1ируемо11 скоростью открьггия. Л еханический привод имеет корпус 1, в котором размешены рычаги 3, хвостовые части 4 которых ноджаты пружинами 5. установ- .к нными в углублениях 6, к распорному звену 7. Распорное звено 7 снабжено основными 9 и дополнительными 11 плоскими оиор- пыми нлошадками. Корпус 1 привода рас- положеп во внутренней полости отде, 1яемой детали 10. Осповпые 9 и дополнительные 11 onopinjie плонхадки образуют призмы с числом грапей, равным числу рычагов 3, и сопряжены посредством наклонных ii.iocKocTeii 16. .Хвостовые части 4 рычагов 3 установлены с возможностью взаимодействия с донолни- те.чьными плоскими опорными п.и)П1адками П при открытом положении привода. 2 ил. « сл со 00 сл со Oi ISJ
иг.
(Ч Л;1кг)1 Л. Рении :i;iK;ri 4МГ.1; :)7
(лп тавте. П, .М Ко.|ыи)в;| Тс.чрел И. Bi pfOKi))(4 Ki() ДА. Нижи
Тираж 80.iI о.чиисипг
( I ос ларствениого комип та ( но лслам из(|бретеиий и открытий
1 13035, .()сква. Ж 35. Рауил-куя иаб.. л. 4.5 Прои (волстнс иио-политрафическое ирслириятии, г. Ужгорол. ,1 I l|ii)rKi мая. 4
| Механический привод | 1982 |
|
SU1038676A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
