9 00 Ob
sl
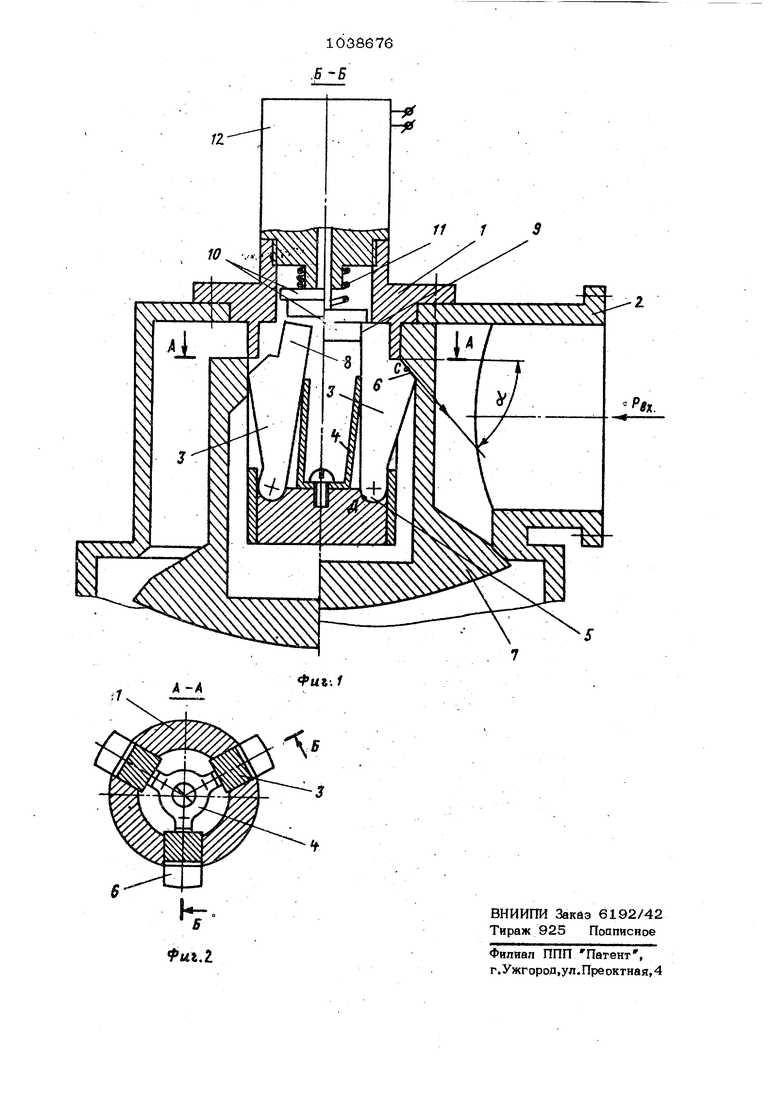
О) Изобретение относится к механическим приводам с поступательным перемещением подвижного (отделяемого органа, к которому приложена осевая сила, и может быть применено в качестве привода пневмогидравлических клапанов выссжого давления в системах пожаротушения, в общем и химическом машиностроении, авиаиии. Извес ген механический привод, содер жащий корпус, подпружиненный клапан со штоком, силовые захваты в виде рычагов опирающиеся своими на серьгу, являющуюся частью обоймы. Между хвоотовинами рычагов зажат якорь электромагнита, являющегося управляющим устройствомОднако гфивод не является автомати ческим, т.е. для приведения его в рабочее положение необходим демЗйтаж rf ручная сборке. Это значительно сужает область применения привода и позволяет использовать его только в системах с одноразовым срабатыванием устройства. Наиболее близким хю технической сущностн и достигаемому результату к пред,лагаемсму является механический привод содерзкащий корпус, в котором размещены силовые захваты с отжимающими пружинами, распорное звево, выполненное в форме тепа вращения, связанное с управляющим устройством, и полую отделяемую деталь 12. Известный механический привод обладает малыми габаритно-массх выми характеристиками и является компактным. Однако привод не обладает свойствами мобильности и его можно использовать только лишь в стационарных установках, которые не подтюзкат разборке на ripoтяжении всего срока эксплуатации. Цель изобретения - расширение области применения привода. Поставленная цель достигается тем, что в механическом приводе, содержащем корпус, в котором размещены снповыз захваты с отжимающими пружинами, распорное звено, выполненное в форме тепа вращения, с ухфавляющим уст«ройствок, н полую отделяемую деталь, корпус провода вы1юпнен в виде автонсв його узла, размещенного в полости отделяемой деяапн I а сиповые захваты - в виде рычагов, одни концы которых установлены с возможностью взавмоаействнг с корпусом привода а другие - с отдел$1емой аетадью в растюрным звеном оаноIвременно, причем отжимающие пружины размещены между рычагами. На фиг. 1 изображена конструкция ме хаиического привода, общий вид, разрез, (левая половина фиг.1 поясняет открытое положение привода в момент отхода отделяемой детали, а правая - закрытое); на фиг. 2 - привод, находящийся в закрытом положении без отделяемой детали, разрез. Механический привод состоит из собственного корпуса 1, выполненного в впив автономного узла, который закреплен ( на корпусе 2 клапана. В корпусе 1 привода размещены рычаги 3, которые подпружинены отжимающими пружинами 4. Рычаги 3 одними своими концами, выполненными в форме профильных поверхвостей 5 (например, цилиндрические поверхности) взаимодействуют с соответствующими поверхностями корпуса 1, опорными площадками 6, выполненными под углом сС к плоскости перпердикулярной оси привода,с отделяемой деталью 7,в полости которой реизмещен корпус 1 привода, а другими своими концами 8 по плоскостям 9 контактируют с распорйым звеном 10, выполненным в форме тела вращения. Распорное звено 10 подпружинено пружиной 11 относительно KOJ пуса управляющего устройства 12, например, электромагнита. j Bja6o4eM (закрытом) положении на отделяемую деталь 7 действует cvim, возникающая в результате действия на тарепь клапана входного давления (4«r.1). Под действием этой ситы отделяемая деталь 7 стремится отойти вниз. Однако такому перемещению препятствуют рычаги 3, опорные площадки 6 которых выступают через соответствующие окна за пределы корпуса 1 (фиг. 2), и удерживают отделяемую деталь 7 в верхнем положаннн. Поскольку опорные площадки 6 рычагов 3 выполнены под углом сС , то в точке С (фиг. 1) происходит разложение сил. Поц их действием рычаги 3 стремятся раэвернуться вокруг точки Д - мгновенного центра вращения - свош-ш ксждамв 8 к оси привода, сжав прв этом пружины 4. Однако такому развороту препятствует распорное звено 10, находящееся во взаямодействив с кошщмв в рычагов 3 по nnocKOCTSiM 9. Обмотка 8шктр(я.шгш1та управляющего устройства 12 при этом оёесточева в распорное звеш 10 поджато щ ужнной 11 в крайнее нвжше гюпоженве. Привод находится в закрытом попоженви. Происходит удержание отдепяомой детапв 7.
Дпя открытия привода достаточно подать напряжение на электромагнит управляющего устройства 12. При этом якорь перемещает в верхнее положение (левая половина фиг.1) распорное звено 10,5
сжимая пружину 11.
Поскольку контактное взаимодействие распорного эвена 1О и рычагов 3 по плоскостям 9 разорвано, то рялчаги 3 JQ получак)т возможность развернуться в открытое положение, сжимая пружины 4,
После выхода распорного звева 10 из взаимодействия с рычагами 3 последние разворачиваются относительно мгновен- ., ных центров вращения Д своими концами 8 к оси привода, сжимая при этом пружины 4. При таком развороте рычагов 3 . их опорные площадки 6 выходят вз взаимодействия с соответствующими плошаде 20 нами отделяемой детали 7, которая под действием силы может безпрепятственно выйти вниз на веограниченное расстояние. После полного выхо отделяемой детали 7 рычаги 3 под действием пру- 25 жнн 4 возвращаются в исходное (закрытое) положение. При снятии напряжения с обоймы электромагнита управляющего устройства 12 распорное звено 10 под дейслгвием пружины 11 возвращается в нижнее хюложеешЕе и входит во взаимодействие с концами 8 рычагов 3 по : плоскостям 9. Все детали привода опять находятся в закрытом положении, однако деталь 7 отсутствует так как в процессе срабатывания привода она отходвт BRfEs на неограниченное расстояние. Привод срабатывает, происходит отделение удерживаемой детали 7.
Для того, чтобы произвести захват и удержание отделяемой детали 7, необходимо подать напряжение на обмотку электромагнита зтггравляющего устройс1 ва 11. При этом распорное звёво 10 перемещается в крайнее верхнее положение, освобождая концы 8 рычагов 3. После этого можно при помощи постороннего воздействия подвести и перемещать вверх отделяемую деталь 7. Последняя при перемещении вверх своей крайней верхней внутренней кромкой разворачивает рычаги 3 в открытое положение (левая половина фиг. 1). При достижении отдетшемой деталью 7 своего крайнего :Верхнего (закрытого) положения опорные площадки 6 совмещаются с соответствую кшшми площадками детали 7. Рычаги ;3 при этсм получают возможность развед ууться в закрытое положение под действием пружин 4, т.е. происходит захват дет-алв 7. Для фиксации зак рк1того 1юложениа нужно снять напряжение с обоймы эпектрся агнита управляющего устройства 12. При этом распорное звено 1О под действием 11ружины 11 возвращается в крайнее нижнее положение и входит во взанмодействие с концами 8 рычагов 3 по плоскостям 9. Механический привод закрыт н готов к циклу работы.
Технико-эконся гаческая эффективность юобретення заключается в расширении областв првмевдння механического тлрявода вследствие выполнения корпуса пр вода в виде автономного узла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1986 |
|
SU1348596A2 |
| Механический привод | 1980 |
|
SU974009A1 |
| Электромеханический привод клапана | 1980 |
|
SU909397A1 |
| Механический привод | 1981 |
|
SU1028936A2 |
| ПРИЖИМНОЙ РЫЧАГ СКВАЖИННЫХ ГЕОФИЗИЧЕСКИХПРИБОРОВ | 1970 |
|
SU258991A1 |
| Механический замок | 1990 |
|
SU1762069A1 |
| Устройство для отделения деталей от стопы и последующего их позиционирования | 1981 |
|
SU1291523A1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| УСТРОЙСТВО КАССЕТЫ ДЛЯ ДЕНЕЖНЫХ КУПЮР, ПРЕДНАЗНАЧЕННОЙ ДЛЯ БАНКОМАТА | 2003 |
|
RU2299466C2 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 2001 |
|
RU2217314C2 |
МЕХАНИЧЕСКИЙ ПРИВОД, содрраквщвй корпус, ь котором размеловшл .свповые захваты с отжимающими пружо вами, распсфное звено, выпопшнвое. а форкю тепа врашешя/связанное с улравпв.jonniM устройством, V попую а епяемую деталь, от п и ч а ю щ и t с я тем, что, с цепью расшврешш обпасти щжме нвввЯ| KopHtyc привода выпопнев . автовомтюго узпа, размешенного в попооТВ отделяемой дефапв, а свповые захва ты - в виде рычагов, однв ковпы которыт уставовпены свозмсакностью взавмодей стмш с корпусом преюой, а другие « с, т деляемой деталью и распорным звеном одновременно, прячем отжимающне Щепкины размещены между ры чагамн. S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
