(5) МЕХАНИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1981 |
|
SU1028936A2 |
| Механический привод | 1980 |
|
SU945572A1 |
| Механический замок | 1990 |
|
SU1762069A1 |
| Механический привод | 1986 |
|
SU1348596A2 |
| Механический привод | 1980 |
|
SU934128A1 |
| Механический привод | 1982 |
|
SU1038676A1 |
| Механический привод | 1981 |
|
SU987255A1 |
| Устройство для сборки под сварку | 1987 |
|
SU1438946A1 |
| Электромеханический привод | 1980 |
|
SU943462A2 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ С ВНУТРЕННИМ ПОРШНЕМ ДЛЯ БЕЗГИЛЬЗОВОГО ПАТРОНА | 2016 |
|
RU2669037C2 |
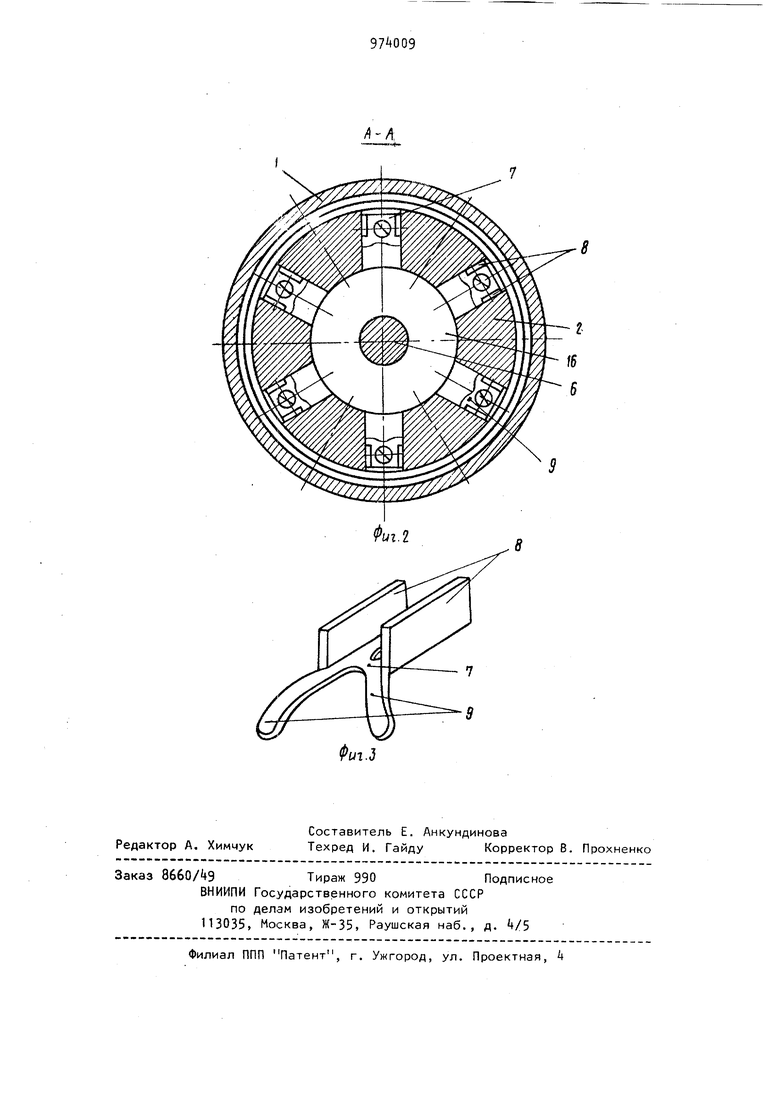
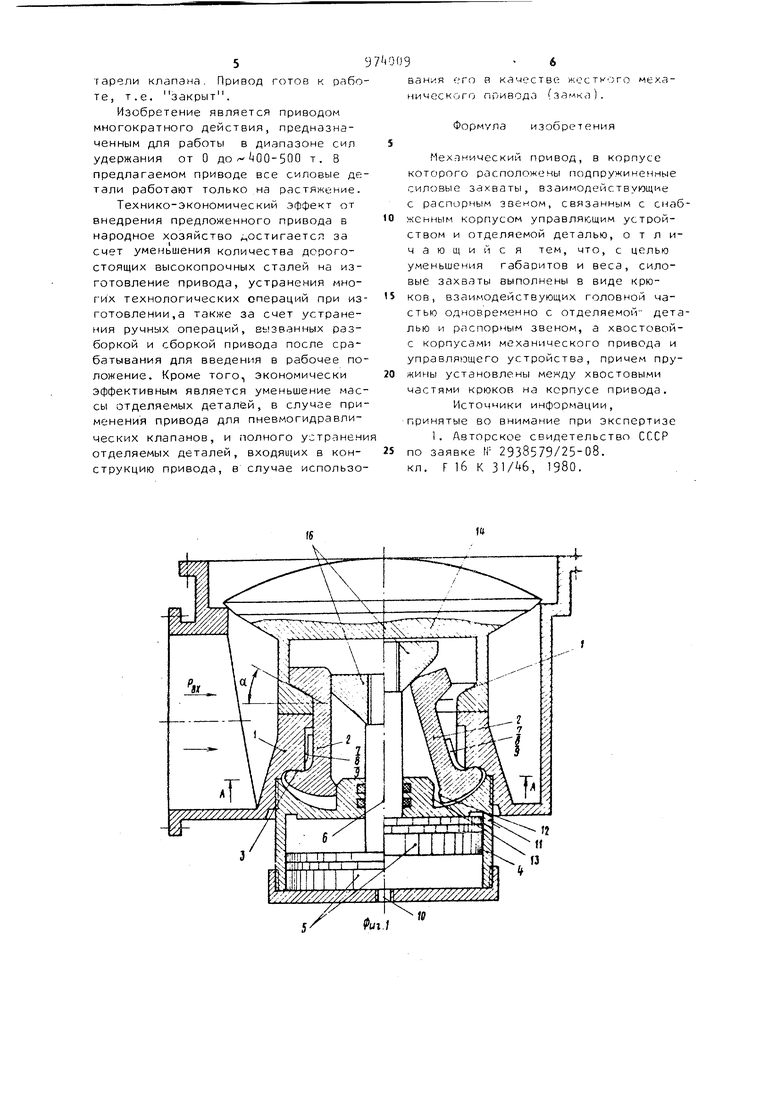
Устройство относится к механическим приводам с поступательным перемещением подвижного органа и большой осевой силой, приложенной к подвижному органу в момент срабатывания, и может быть применено для пнеемо-, гидравлических клапанов высокого дав ления в общем и химическом машиностроении, авиации. В качестве жестко го механического привода (замка) возможно применение в подъемно-транс портных механизмах и других отраслях народного хозяйства, где требует ся разъединение нагруженных деталей. Известен механический привод, в корпусе которого расположены подпружиненные силовые захваты, взаимодействующие с распорным звеном, свя занным с снабженным корпусом управля щим устройством и отделяемой деталью 1 . Недостатками известного устройства являются большой вес и габариты, поскольку силовой захват, выполненный в форме сухаря требует дополнительной силовой детали - болта «: фигурной головкой, а отделяемая деталь выполняется сплошной. Цель изобретения - уменьшение габаритов и веса. Поставленная цель достигается тем, что силовые захваты выполнены в виде крюков, взаимодействующих головной частью одновременно с отделяемой деталью и распорным звеном, а хвостовой- с корпусами механического привода и управляющего устройства, причем пружины установлены между хвостовыми частями крюков на корпусе привода. На фиг. 1 схематически показана предлагаемая конструкция.привода, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - конструкция отжимающей пластинчатой пружины.. Механический привод состоит из корпуса 1, с которым взаимодействуют крюки 2 по поверхностям 3 и к ко торому крепятся корпус управляюще устройства, например пневматическог цилиндра с поршнем 5 и штоком 6, и отжимающие пластинчатые пружины 7с гребнями 8 и пружинящими пзычками 9 6 корпусе 4 пневматического цилиндра выполнены два окна для подвода сжатого воздуха на открытие : привода - окно 10 и на закрытие привода окно 11. Крюки 2 взаимодействуют св ими опорными поверхностями 12 хвост вых частей с опорными поверхностями 13 корпуса управляющего устройства. Своими головными частями крюки 2 удерживают отделяемую деталь 1, например тарель клапанавысокого давления и большого условного прохо да. Контакт крюков 2 и отделяемой детали 14 - тарели клапана происходит по плоскостям 15, которые накло нены к плоскости, перпендикулярной оси привода под углом о . Всю силовую систему в равновесии при закрытом положении привода удерживают управляющая тарель 16,связанная со штоком 6 поршня 5 и взаимодействующая с головными частями крюков 2 Рабочее положение привода изобра жено на левой половине фиг. 1 и положение деталей привода после срабатывания , но при отсутствии давления Ра, на правой половине фиг. 1 . Устройство работает следующим образом. В рабочем положении тарель 1 удер живается в нижнемположении крюками 2 по плоскостям 15. Хвостовые части крюков 2 опираются по плоскостям 3 на корпус 1 привода. Под действием давления Pg,( тарель 14 стремится подняться и отойти от седла клапана но ей препятствуют крюки 2. Так как опорные плоскости 15 выполнены под углом Ы , то появляется сила, которая стремится развернуть крюки 2 головными частями к оси привода. Однако этому развороту препятствует тарель 16, находящаяся между головными частями крюков 2 и удерживаемая в нижнем положении поршнем 5 посредством штока 6. Под действием осевой растягивающей силы, возникающей вследствие действия давления Pg хвостовые части крюков 2 стремятся отогнуться к оси привода, так как опорные поверхности смещены относительно стержней крюков 2, т.е. хвостовые части и стержни крюков 2 подвержены действию внецентренного растяжения. Для устранения этого явления, хвостовые части крюков взаимодействуют своими поверхностями 12 с поверхностями 13 корпуса управляющего цилиндра.Благодаря этому контакту исключена возможность деформации хвостовых частей крюков к оси привода и стержни их, вследствие этого, подвержены действию чистых растягиВсШщих усилий. Аналогично нагружены и головные части крюков,взаимодействующие одновременно с тарелью 16 и отделяемой деталью 14 (тарелью клапана). Пластинчатые пружины 7 (фиг.2) закреплены на корпусе 1 таким образом, что своими пружинящими язычками 9 воздействуют на стержни крюков 2, а гребнями 8 контактируют с хвостовыми частяАии крюков, предотвращая их перемещение от номинального положения по поверхности 3, т.е. кор пус 1 с укрепленными на нем пружинами 7 с гребнями 8 образовывают сепаратор для хвостовых частей крюков. При подаче сигнала на открытие привода, т.е. при подаче давления сжатого воздуха в окно 10, поршень 5 вместе со штоком 6 перемещается вверх, выдвигая тарель 16 из зоны взаимодействия с головными частями крюков. Последние получают возможность развернуться к оси привода под действием сил пружин 7, контактирующих со стержнями крюков посредством своих пружинящих язычков 9) и сил, возникающих вследствие наличия давления Pg и угла Ы . Развернувшись таким образом, крюки дают возможность тарели клапана (отделяемой детали 14) свободно отойти от корпуса 1, Если давление то разворот крюков происходит только под действием пружин 7, и положение деталей привода после срабатывания будет такое, как изображено на правой половине фиг. 1.. При подаче сигнала на закрытие, т.е. при подаче давления сжатого воздуха в окно 11, поршень 5 со штоком перемещаются вниз, увлекая за собой управляемую тарель 16, которая своей задней профильной поверхностью воздействует на головные части крюков и разворачивает их от оси привода в рабочее положение . Происходит захват и удержание отделяемой детали 145
тарели клапана. Привод готов к работе, т.е. закрыт.
Изобретение является приводом многократного действия, предназначенным для работы в диапазоне сил удержания от О до ОО-ЗОО т. В предлагаемом приводе все силовые детали работают только на растяжение. Технико-экономический эффект от внедрения предложенного привода в народное хозяйство остигаетсп за счет уменьшения количества дорогостоящих высокопрочных сталей на изготовление привода, устранения многих технологических операций при изготовлении,а также за счет устранения ручных операций, вызванных разборкой и сборкой привода после срабатывания для введения в рабочее положение. Кроме того, экономически эффективным является уменьшение массы отделяемых деталей, в случае применения привода для пневмогидравлических клапанов, и полного устранени отделяемых деталей, входяи1их в конструкцию привода, в случае использо ООЗ- 6
вания его а качестве жесткого механического привода (замкл).
Формула изобретения 5
Механический привод, в корпусе которого расположены подпружиненные силовые захваты, взаимодействующие с распорным звеном, связанным с снабженным корпусом управляющим устройством и отделяемой деталью, отличающийся тем, что, с целью уменьшения габаритов и веса, силовые захваты выполнены в виде крюков, взаимодействующих головной частью одновременно с отделяемой- деталью и распорным звеном, а хвостовойс корпусами механического привода и управляющего устройства, причем пружины установлены между хвостовыми частями крюков на корпусе привода.
Источники информации, принятые во внимание при экспертизе
. Авторское свидетельство СССР 5 по заявке N 2938579/25-08. кл. F 16 К , 1980.
