ю
со
оэ
О)
Изобретение относится к роботетехнике.и может быть использовано при создании следящих приводов промышленных роботов.
Известно устройство для управлеиия промышленным роботом, содержащее регуляторы положения, скорости и тока, датчики тока, положения и скорости, а также блоки сравнения, усилитель мощности, блок деления и двигатель 1.
Однако это устройство имеет низкие качество регулирования и точность позиционирования.
Наиболее близким техническим решением к изобретению является устройство, содержащее первый и второй ключи, последовательно соединенные задатчик положения, сумматор, регулятор положения и регулятор скорости, последовательно включенные регулятор тока, усилитель мощности, двигатель и датчик тока, выход которог соединен с первым входом регулятора тока, вал двигателя кинематически связан с датчиками положения и скорости, выходами подключенными к второму входу сумматора и регулятора скорости соответственно 2 3.
Данное устройство характеризуется .повышенной сложностью и недостаточной надежностью, вызванной тем., что они содержат блоки умножения и деления, которые реализуют операции умножения и деления аналоговых сигнлов и обладают недостаточно высокой надежностью.
.:Целью изобретения является упрощение и ловышение надежности устройства.
Поставленная цель достигается тем, что устройство содержит регулятор момента, дифференциатор и последовательно соединенные нуль-орган, элмент памяти и инвертор, выходом соединенный с первым входом второго ключа, второй вход которого через регулятор момента подключен к входу нуль-органа и выходу сумматора, а выход - к второму входу регулятора TOKai третьим входом соединенного с выходом первого ключа, первый вход которого подключен к выходу регулятора скорости, а второй вход - к выходу элемента памяти, вторым входом соединенного через дифференциатор с выходом задатчика положения. На чертеже представлена функциональная схема предлагаемого устройства.
Схема включает задатчик 1 положения, сумматор 2, регулятор 3 положения, регулятор 4 скорости, первый ключ 5, регулятор 6 тока, усили-. тель 7 мощности, двигатель 8, датчин 9 тока, датчик 10 скорости, датчик 11 положения, нуль-орган 12, элемент 13 памяти, инвертор 14, второй ключ 15, дифференциатор 16, регулятор 17 момента. 0 Устройство работает следующим образом.
В автоматическом режиме осуществляется отработка заданного задатчиком 1 положения, рассогласование по 5 положению выявляет сумматор 2 и подает его на регулятор 3 положения, который формирует сигнал задания скорости и подает его на регулятор 4 скорости. Контур скорости, состоящий из блоков 4 - 10, работает как обычный регулируемый электропривод с внутренней обратной связью по току. Первый ключ 5 при этом открыт и п.ропускает выходной сигнал регуляf. тора 4 на вход регулятора 6- тока. Второй ключ 15 при этом закрыт.
В момент прихода вала исполнительного двигателя 8 в требуемое положение нуль-орган 12 вырабатывает .сигнал нулевого рассогласования, который запоминается элементом 13 памяти.
При этом происходит изменение состояния ключей 5 и 15: первый ключ 5 закрывается, а второй ключ 15 через 5 инвертор 14 -открывается. При этом разрывается скоростной контур и устройство переходит в. режим работы моментного привода.
Под действием возмущающего момента, определяемого, например, статической неуравновешенностью подвижного органа робота, рассогласование начинает увеличиваться. При этом регулятор 17 момента формирует в функс ции рассогласования сигнал задания удерживающего момента, который подается на регулятор 6 тока. В зависимости от передаточной функции регулятора 17 момента (П-регулятор, пи-регулятор )f система функционирует как статическая или астатическая по возмущающему моменту.
В таком режиме устройство функционирует до момента перехода к следующему кадру, который фиксируется дифференциатором 16.
Устройство является простым и надежным.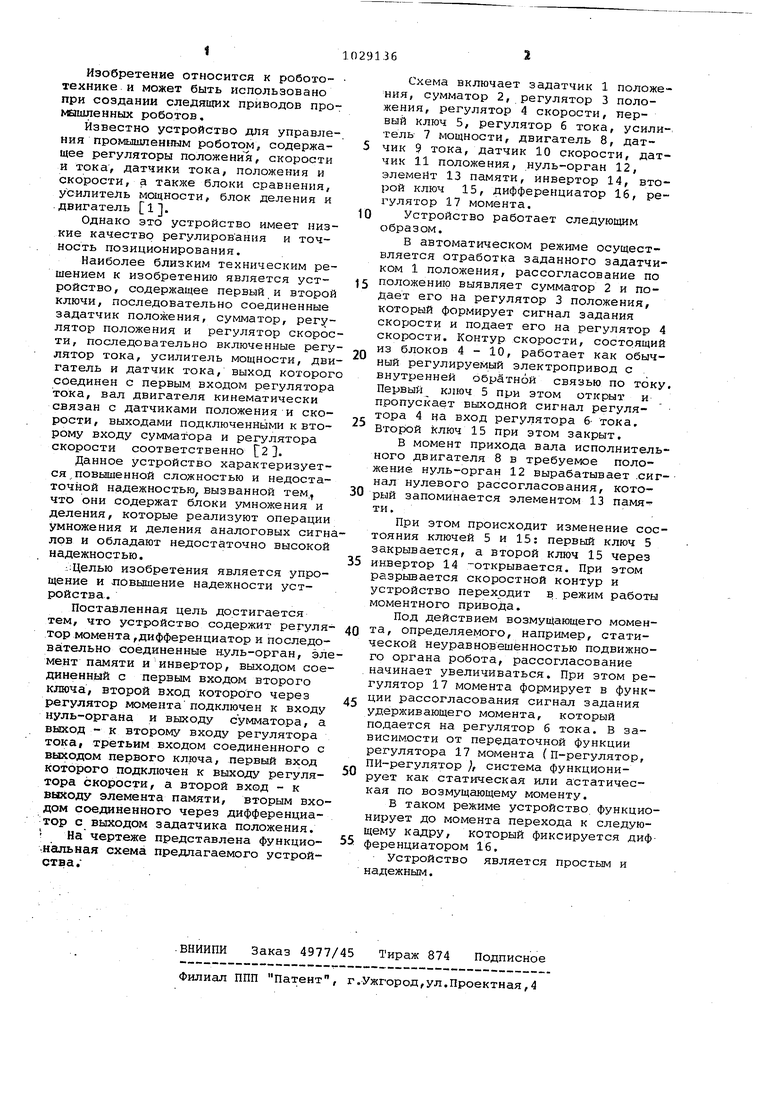
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Устройство для управления электроприводом | 1981 |
|
SU980067A2 |
| Устройство для определения момента касания режущего инструмента с обрабатываемой деталью | 1983 |
|
SU1148769A1 |
| Устройство для регулирования уровня жидкости в резервуаре | 1988 |
|
SU1679470A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЬШШЕННЫМ РОБОТОМ, содержащее . первый и второй ключи, последова.тель.но соединенные задатчик положения, сумматор, регулятор положения и регулятор скорости, последовательно включенные регулятор тока, усилитель мощности, двигатель и датчик тока, выход которого соединен с первым входом регулятора тока, вал двигателя кинематически соединен с датчиками положения и скорости, выходами подключенными к вторым входам сумматора и регулятора скорости соответственно, о т л- и ч-а ю щ е е с я тем, что,-с целью упрощения и повышения надежности устройства, оно содержит регулятор момента, дифференциатор и последовательно соединенные нуль-орган, элемент памяти и инвертор, выходом соединенный с первым входом второго ключа, второй вход которого через регулятор момен- та подключен к входу нуль-органа и выходу сумматора, а выход - к второ му входу регулятора тока, третьим входом соединенного с выходом перво- Щ го ключа, первый вход которого под(Л .ключен к выходу регулятора скорости, а второй вход - к,выходу элемента с памяти, вторым входом соединенного через дифференциатор с выходом задатчика положения.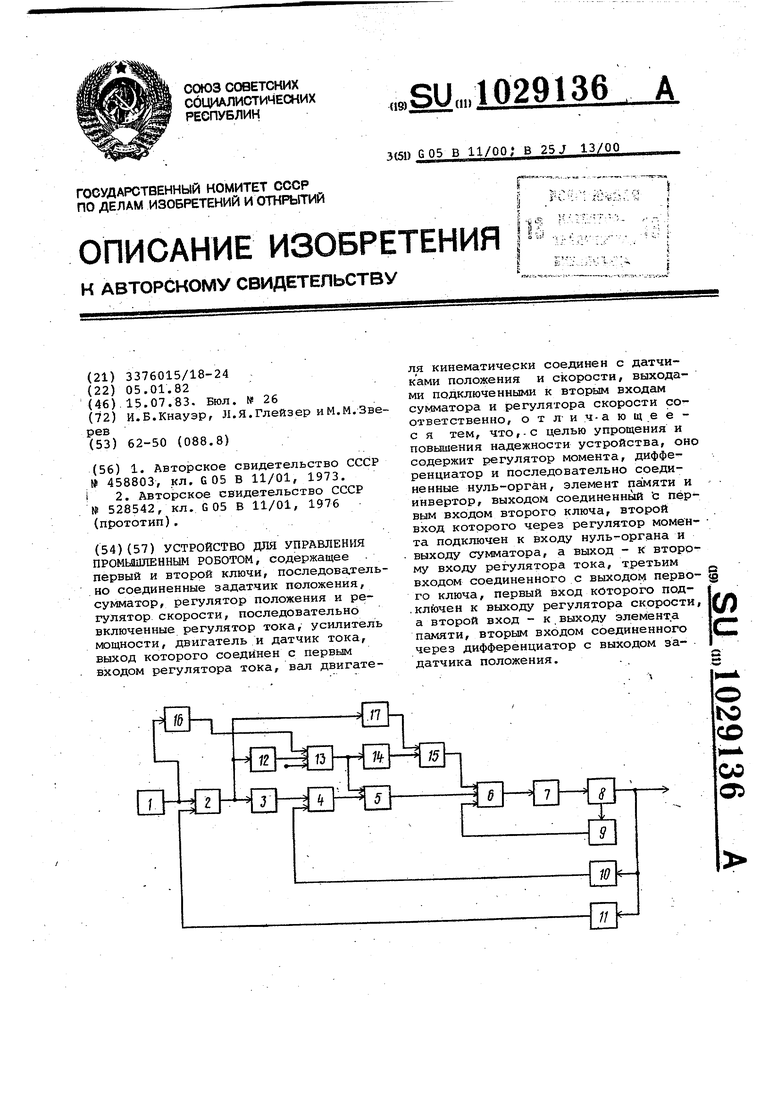
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кассета для рентгеновской установки | 1973 |
|
SU458803A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления позиционным электроприводом | 1973 |
|
SU528542A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
