to
О5 СП
о:
Изобретение относится кробототех нике и может быть использовано при создании электроприводов промьштенных роботов, инвариантных к изменению статического момента нагрузки.
Цель изобретения - улучшение динамических характеристик устройства за счет компенсации изменения статического момента нагрузки.
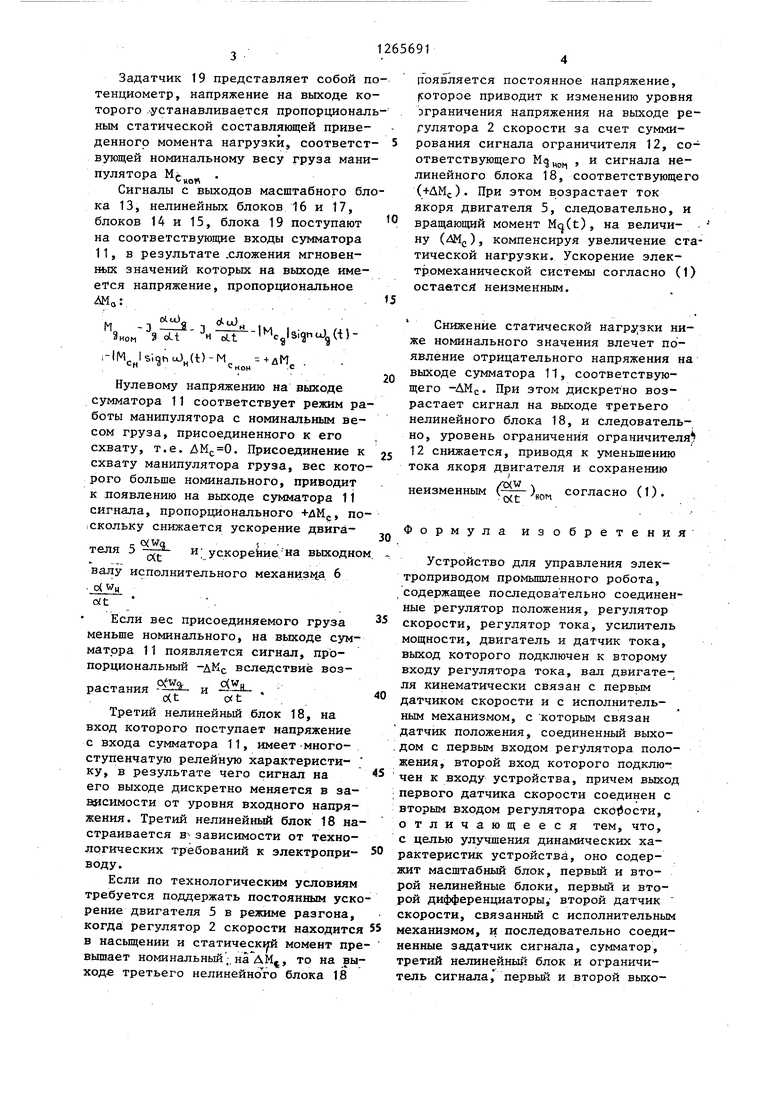
На чертеже представлена функциональная схема устройства.
Устройство содержит регуляторы 1-3 положения, скорости и тока соответственно, усилитель 4 мощности, двигатель 5, исполнительный механизм 6, датчик 7 тока, первый датчик 8 скорости, датчик 9 положения, второй датчик 10 скорости сумматор 11, ограничитель 12 сигнала, масштабный блок 13, первый и второй дифференциаторы 14 и 15 соответственно, первый второй и третий нелинейные блоки 16-18 соответственно, задатчик 19 сигнала.
Устройство работает следующим Образом.
На один вход регулятора 1 положения подается сигнал, пропорциональный требуемому заданному положению исполнительного органа роб.ота, на второй вход регулятора 1 положения с датчика 9 положения поступает сигнал, пропорциональный текущему положению исполнительного механизма Ъ. В соответствии с разностью входных сигналов регулятор 1 положения вырабатьшает сигнал задания скорости .электродвигателя 5 и подает его на один вход регулятора 2 скорости. На вход регулятора 2 скорости поступает с датчика 8 скорости сигнал, пропорциональньй текущему значению скорости электродвигателя 5. В соответствии с разностью входных сигналов регулятор 2 скорости вырабатывает сигнал задания тока электродвигателя 5 и подает его на первый вход регулятора 3 тока. На второй вход регулятора 3 тока поступает сигнал с датчика 7 тОка. С выхода регулятора 3 тока сигнал через усилитель 4 мощности поступает на вход электродвигателя 5, приводя его во вращение. При номинальном моменте статической нагрузки электродвигатель 5 раз гоняется с ускорением
Мучоп-: Mgiflipjif,
.
(1)
BOM
.«ом,,
Де (|г)иои
требуемое ускорение при номинальной статической нагрузке; момент двигателя 5,
Mr
JHOM соответствующий номинальной статической нагрузке и требуемому ускорению;
,и1 приведенные к валу
иом
НОм двигателя 5 момент статической нагрузки и суммарньш момент инерции при номинальном весе груза, присоединяемого к схвату.
Сигнал с вькода датчика 7 тока поступает также на вход масштабного блока 13, выходное напряжение которого пропорционально моменту двигателя 5 Щ СЦ , где С - постоянный коэффициент.
Сигнал с выхода датчика 8 скорости поступает на нелинейный блок 17 и дифференциатор 15. Нелинейный блок 17 имеет зависимость выходного напряжения от входного
вымт (t)K sign и&х„ (t) ,
т.е. выходной сийнал данного блока соответствует составляющей момента Сопротивления, обусловленной сухим трением двигателя в масштабе напряжений .
Коэффициент передачи блока 15 выбран таким, что сигнал на его выo(
(t)K,
ходе UH,
пропорцио.1X15
5 CXt
нален составляющей момента сопротивления двигателя Iq - .
С( t
Сигнал с выхода второго датчика tO скорости, пропорциональный скорости на выходном валу исполнительного механизма 6, поступает на нелинейный блок 16 и дифференциатор 14.
Нелинейный блок 16 реализует зависимость
(t)Kij,. sign Ujxie (t)
и
ЬМХ1Б
что соответствует приведенному моменту сухого трения нагрузки. о
Напряжение на выходе блока 14 пропорционально приведенной к валу двигателя 5 составляющей момента сопро С( W
тивления нагрузки „ ---i-L ,
,d(t Задатчик 19 представляет собой п тенциометр, напряжение на выходе ко торого .устанавливается пропорционал ным статической составляющей приведенного момента нагрузки, соответст вующей номинальному весу груза мани пулятора , . Сигналы с выходов масштабного бл ка 13, нелинейных блоков 16 и 17, блоков 14 и 15, блока 19 поступают на соответствующие входы сумматора 11, в результате .сложения мгновенных значений которых на выходе имеется напряжение, пропорциональное ЛМо.. . . r,d-u} М -3 - H- -l%lsi9nuJg(i)Яном t -McJ igt 4(tbM нонс Нулевому напряжению на выходе сумматора 11 соответствует режим ра боты манипулятора с номинальным весом груза, присоединенного к его схвату, т.е. ДМ(,0. Присоединение к схвату манипулятора груза, вес кото рого больше номинального, приводит к лоявлению на выходе сумматора 11 сигнала, пропорционального +ДМ., по скольку снижается ускорение двигателя 5 - и; ycKopeJiHe на выходно (Xt валу исполнительного механизг а 6 Если вес присоединяемого груза меньше номинального, на выходе сумматора 11 появляется сигнал, пропорциональный -дКс вследствие возOfWq. C(Wu растания -- и . Третий нелинейный блок 18, на вход которого поступает напряжение с входа сумматора 11, имеет многоступенчатую релейную характеристику, в результате чего сигнал на его выходе дискретно меняется в зависимости от уровня входного напряжения. Третий нелинейный блок 18 на страивается в зависимости от технологических требований к электроприводу. Если по технологическим условиям требуется поддержать постоянным уско рение двигателя 5 в режиме разгона, когда: регулятор 2 скорости находится в насыщении и статический момент пре вышает номинальньш;, на ЛМ, то на вы ходе третьего нелинейного блока IS появляется постоянное напряжение, fcoTopoe приводит к изменению уровня ограничения напряжения на выходе регулятора 2 скорости за счет суммирования сигнала ограничителя 12, соответствующего Mij yц , и сигнала нелинейного блока 18, соответствующего (+ДМс). При этом возрастает ток якоря двигателя 5, следовательно, и вращающий момент Mq(t), на величи- ну (2), компенсируя увеличение статической нагрузки. Ускорение электромеханической системы согласно (1) остается неизменным. Снижение статической нагрузкк ниже номинального значения влечет появление отрицательного напряжения на выходе сумматора 11, соответствующего -ДМс. При этом дискретно возрастает сигнал на выходе третьего нелинейного блока 18, и следовательно, уровень ограничения ограничителя 12 снижается, приводя к уменьшению тока якоря двигателя и сохранению неизменным (- )„,.., согласно (1) . (Xt f Формула изобретения Устройство для управления электроприводом промышленного робота, содержащее последовательно соединенные регулятор положения, регулятор скорости, регулятор тока, усилитель мощности, двигатель и датчик тока, выход которого подключен к второму входу регулятора тока, вал двигателя кинематически связан с первым датчиком скорости и с исполнительным механизмом, с которым связан датчик положения, соединенный выходом с первым входом регулятора положения, второй вход которого подключен к входу устройства, причем выход первого датчика скорости соединен с вторым входом регулятора , отличающееся тем, что, с целью улучшения динамических характеристик устройства, оно содержит масштабный блок, первый и второй нелинейные блоки, первый и второй дифференциаторы, второй датчик скорости, связанный с исполнительным механизмом, и последовательно соединенные задатчик сигнала, сумматор, третий нелинейный блок и ограничитель сигнала, первый и второй выходы которого подключены соответственно к третьему и четвертому входам регулятора скорости, выход датчика . тока через масштабный блок соединен с вторым входом сумматора, подключенного третьим и четвертым входами соответственно к выходам первого дифференциатора и первого нелинейного
блока, входы которых подключены к выходу второго, датчика скорости, а выход первого датчика скорости соединен с входами второго дифферендиа5 тора и второго нелинейного блока, выход каждого из которых соединен соответственно с пятым и шестым входами сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Автономная система электропитания и управления пуском электродвигателей переменного тока | 1984 |
|
SU1252892A1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Вентильный электродвигатель | 1984 |
|
SU1259428A1 |
| Регулятор частоты вращения вала энергетической установки | 1989 |
|
SU1740734A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |

Изобретение относится к области робототехники и может быть использовано при создании электроприводов промышленных роботов. В устройстве за счет введения второго датчика скорости, двух дифференциаторов, трех нелинейных блоков, масштабного блока, сумматора, задатчика и ограничителя си-нала достигается улучшение динамических характеристик устройства за счет компенсации изменения статического момента нагрузки. 1 ил.
| Система управления электроприводомпРОМышлЕННОгО РОбОТА | 1979 |
|
SU830293A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Лебедев Е.Д | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| - М.: Энергия, 1970, с | |||
| Пуговица | 0 |
|
SU83A1 |
