Изобретение относитря к станкостроению и робототехнике и может быть использовано, например, при управлении электроприводами промышлен ных роботов или прецизионных металлорежущих станков с ЧПУ, отрабатывающих монотонно изменяющиеся дозированные задания на перемещение рабочего органа.
Целью изобретения является повышение быстродействия системы за сче сужения ее области применения до отработки только монотонно возрастающих положительных или только моното но убывающих отрицательных сигналов задания по положению.
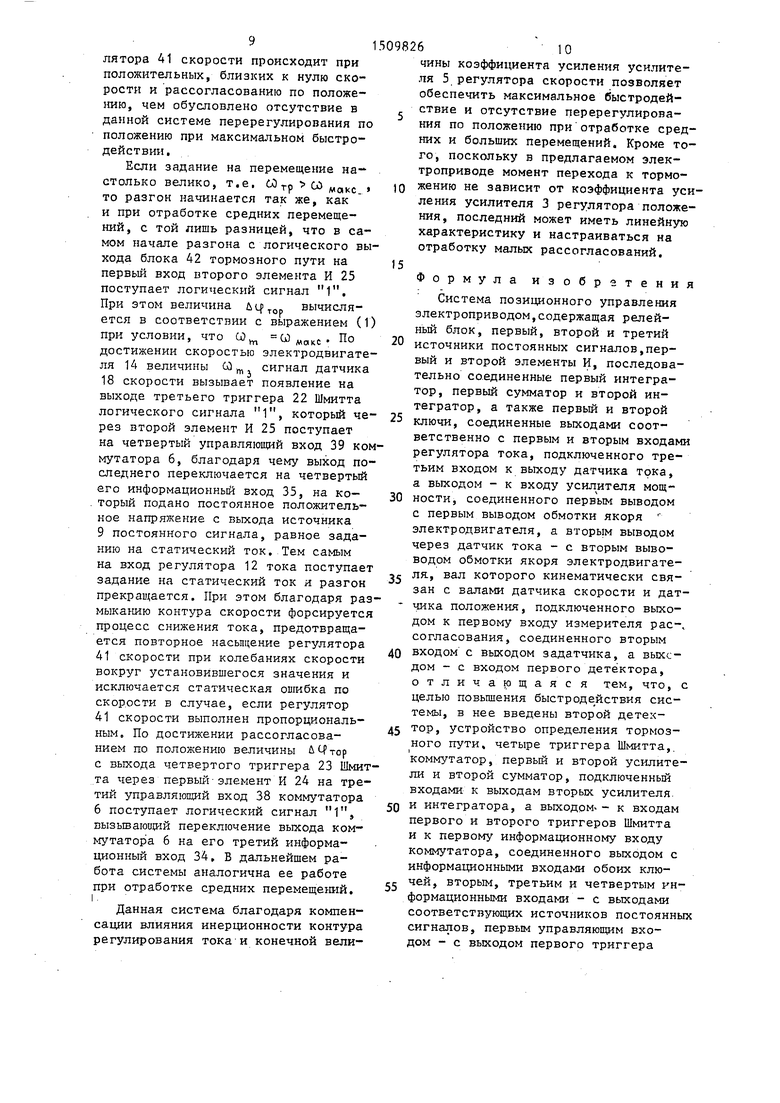
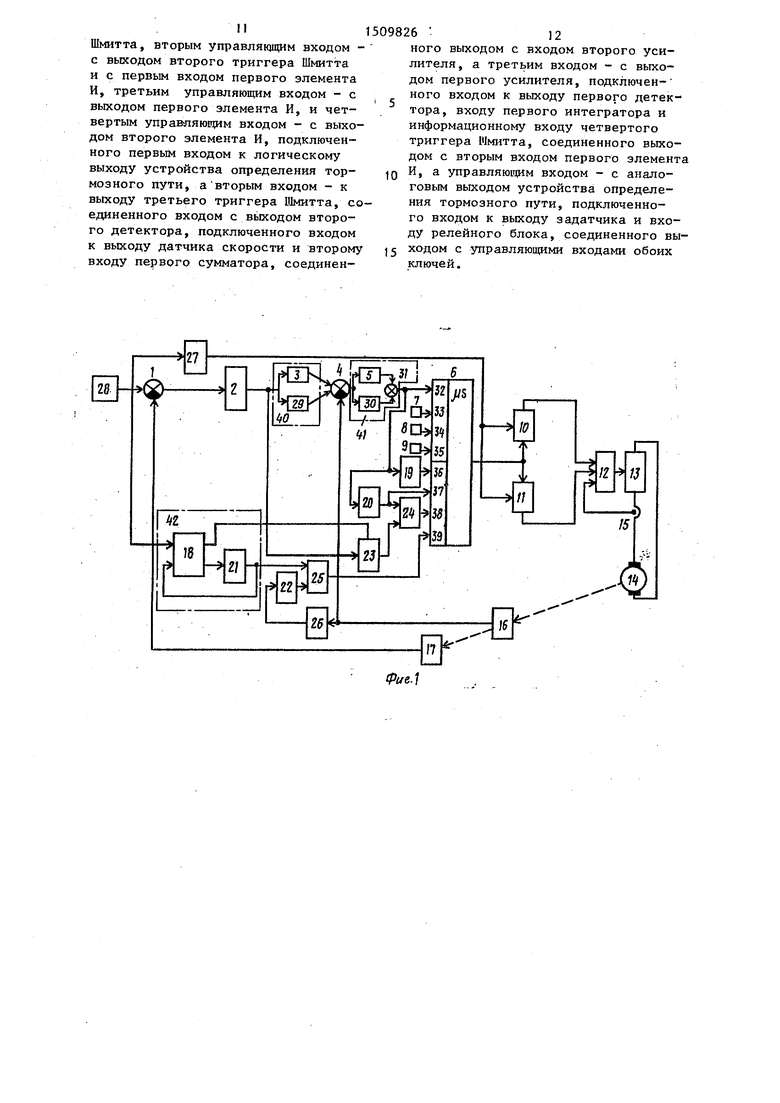
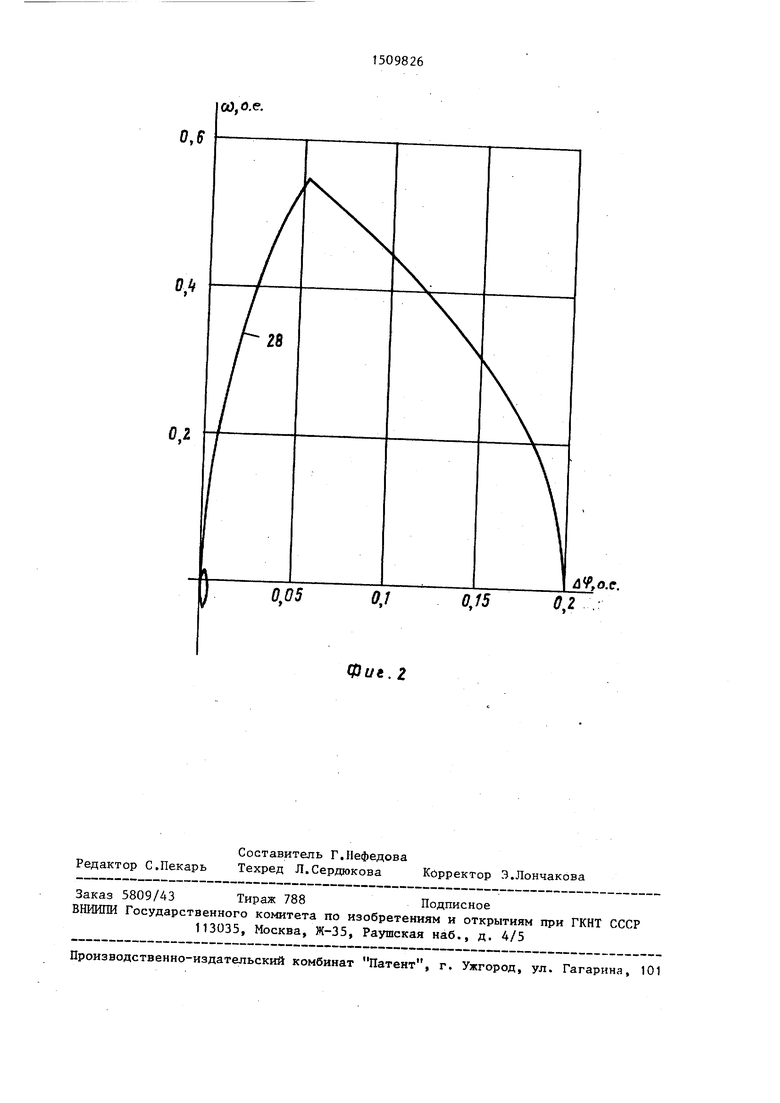
На фиг.1 приведена блок-схема системы; на фиг.2 - фазовая траектори системы с пропорционально-интегральным регулятором скорости при отработке сигнала задания по треугольной тахограмме. I
Система позиционного управления
электроприводом содержит измеритель 1 рассогласования, первый детектор 2, первый усилитель 3, первый сумматор 4, второй усилитель 5, коммутатор 6, первый 7, второй 8 и третий 9 источники постоянных сигналов,первый 10 и второй 11 ключи, регулятор 12 тока, усилитель 13 мощности, элетродвигатель 14, датчик 15 тока, датчик 16 скорости, датчик 17 положения , логико-арифметический вычис- лительный блок 18,первый 19 и второ 20 триггеры Ымитта, пороговый блок с памятью 21, третий 22 и четвертый 23 триггеры Шмитта, первьй 24 и второй 25 элементы И, второй детектор 26, релейный блок 27, задатчик 28, первьш 29 и второй 30 интеграторы, второй сумматор 31, первьй 32, второй 33, третий 34 и четвертый 35 вхды коммутатора 6, первьш 36, второй 37, третий 38 и четвертый 39 информационные входы коммутатора 6, регу лятор 40 положения, регулятор 41 скорости, устройство 42 определения тормозного пути,
На фиг.2 ДЦ - сигнал рассогласования истины, СО - скорость вращения вала электродвигателя 14.
Параллельно включенные первый усилитель 3 и первый интегратор 29 выполняют в данной системе функции регулятора 40 положения, а параллельно включенные второй усилитель 5 и второй интегратор 30 - регуля
15
г 10
тора 41 скорости. В зависимости от - технологических требований к данной системе регуляторы положения 40 и скорости 41 могут быть либо пропорционально-интегральными с передаточными функциями типа Wp К +
+ р-р. либо пропорциональными с пере- -Ч
даточными функциями типа W. К„, где К, К (J - коэффициенты передачи пропорциональной и интегральной составляющей закона регулирования; Т постоянная времени интегрирования. Переход от одного вида регуляторов положения 40 и скорости 41 к другому может быть легко осуществлен обнулением коэффициента передачи K(j, т.е. обнулением коэффициентов передачи интеграторов 29 и 30.
.Регулятор 12 тока обычно вьшол- няется пропорционально-интегральным.
Триггер
Система работает следующим образом.
В исходном состоянии рассогласование по положению равно нулю и сигнал на выходе второго сумматора 31, т.е. на выходе регулятора 41 скорости, отсутствует. При этом с выхода первого триггера 19 Шмитта, работающего в области отрицательных напряжений, на первый управляющий вход 36 коммутатора 6 поступает логический сигнал 1.
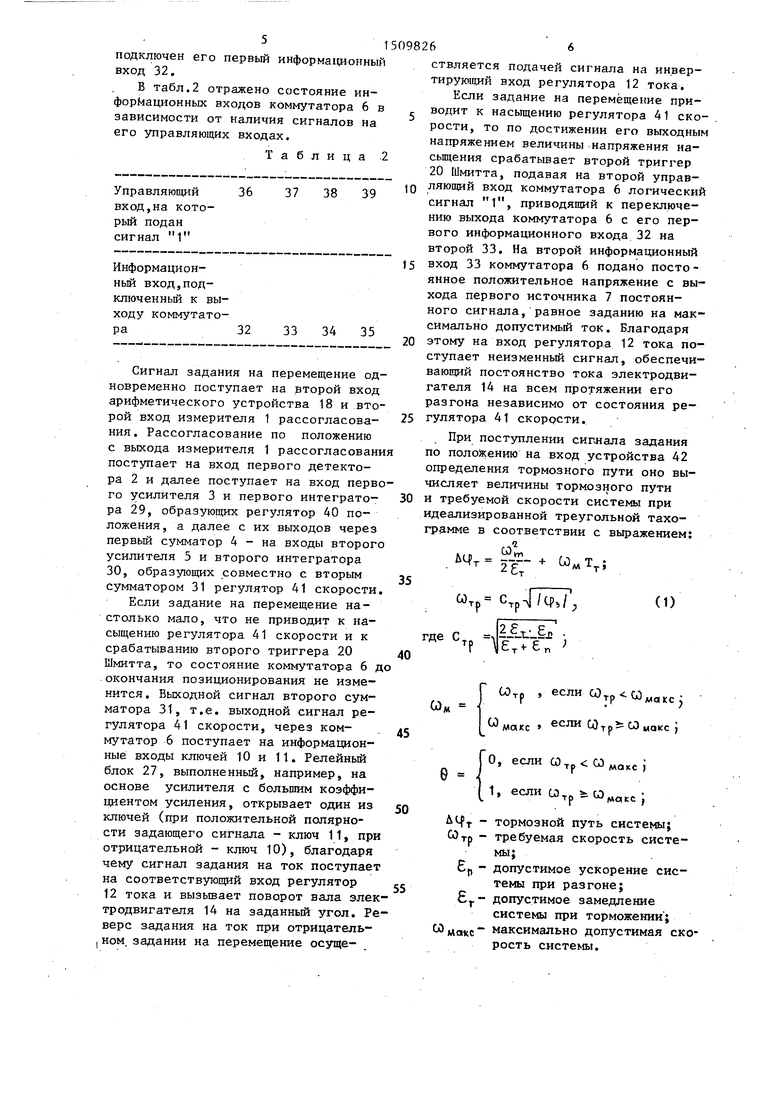
Пороги срабатывания триггеров 19 - 23 Шмитта приведены в табл.1, где максимально допустимый ток;
Триггер
К
К
К,
АТ А дачи датчиков
- коэффициент перетока, скорости и полоТриггер
жения; максимально допустимая скорость; b.Uf- рациональный путь торможения.
Таблица 1
Т
Порог срабатывания
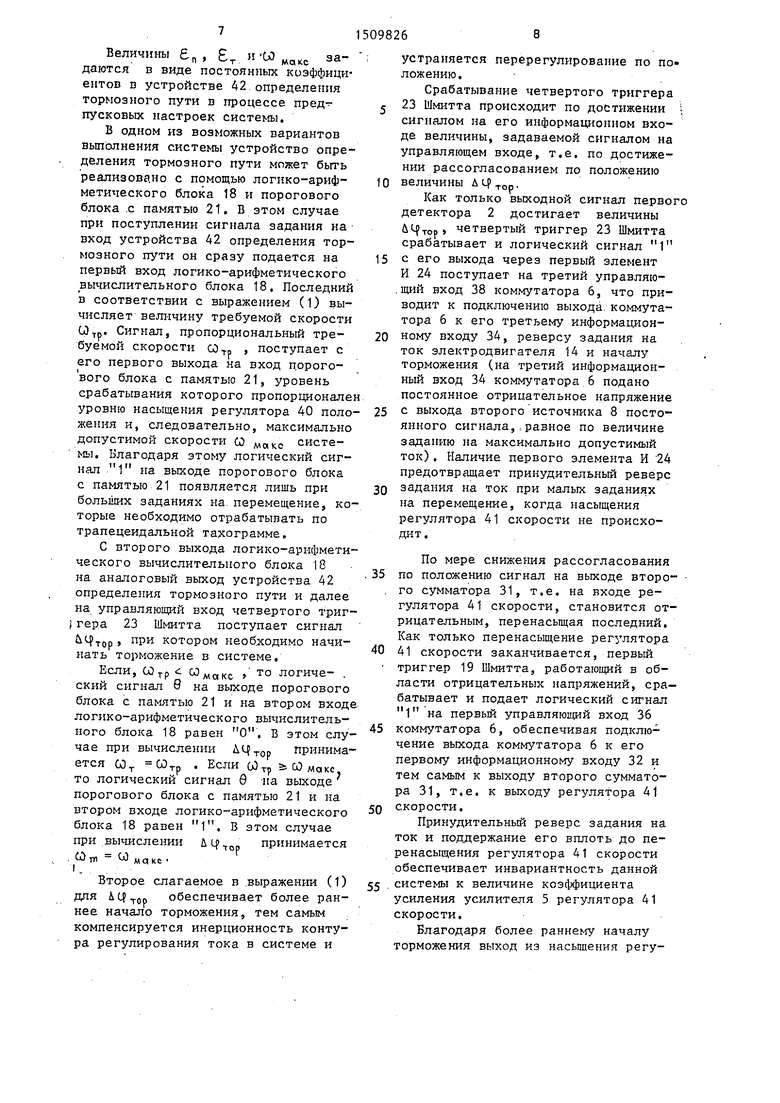
Благодаря наличию на первом управляющем входе 36 коммутатора 6 логического сигнала 1 к его выходу
подключен его первый информационный вход 32.
В табл.2 отражено состояние информационных входов коммутатора 6 в зависимости от наличия сигналов на его управляющих входах.
Таблица .2
36
37 38 39
32
33 34 35
Сигнал задания на перемещение одновременно поступает на второй вход арифметического устройства 18 и второй вход измерителя 1 рассогласова- ния. Рассогласование по положению с выхода измерителя 1 рассогласован поступает на вход первого детектора 2 и далее поступает на вход первго усилителя 3 и первого интеграто- ра 29, образующих регулятор 40 положения, а далее с их выходов через первый сумматор 4 - на входы второг усилителя 5 и второго интегратора 30, образующих совместно с вторым сумматором 31 регулятор 41 скорости
Если задание на перемещение настолько мало, что не приводит к насыщению регулятора 41 скорости и к срабатыванию второго триггера 20 Имитта, то состояние коммутатора 6 окончания позиционирования не изменится. Выходной сигнал второго сумматора 31, т.е. выходной сигнал регулятора 41 скорости, через коммутатор 6 поступает на информационные входы ключей 10 и 11. Релейный блок 27, выполненный, например, на основе усилителя с большим коэффициентом усиления, открывает один из ключей (при положительной полярности задающего сигнала - ключ 11, пр отрицательной - ключ 10), благодаря чему сигнал задания на ток поступае на соответствующий вход регулятор 12 тока и вызьшает поворот вала элетродвигателя 14 на заданный угол. Рверс задания на ток при отрицатель- ,ном. задании на перемещение осуще
0
5
0
5 0
ствляется подачей сигнала на инвертирующий вход регулятора 12 тока.
Если задание на перемещение приводит к насьпцению регулятора 41 скорости, то по достижении его выходным напряжением величины напряжения насыщения срабатывает второй триггер 20 Шмитта, подавая на второй управляющий вход коммутатора 6 логический сигнал 1, приводящий к переключению выхода коммутатора 6 с его первого информационного входа 32 на второй 33, На второй информационный вход 33 коммутатора 6 подано постоянное положительное напряжение с выхода первого источника 7 постоянного сигнала, равное заданию на максимально допустимый ток. Благодаря этому на вход регулятора 12 тока поступает неизменный сигнал, обеспечивающий постоянство тока электродвигателя 14 на всем протяжении его разгона независимо от состояния регулятора 41 скорости.
При поступлении сиглала задания по положению на вход устройства 42 определения тормозного пути оно вычисляет величины тормозного пути и требуемой скорости системы при идеализированной треугольной тахо- грамме в соответствии с выражением;
. c,. S|-
(1)
Сл)
где
со
р
если СОтр СО
макс
Сл)
е
СО
макс
если СОтр СЭмакс j
0,если СОтр СОдлакс j
1,если СО,,е;
ЛС,. тр
тормозной путь системы; требуемая скорость системы;
Ер - допустимое ускорение системы при разгоне;
В допустимое замедление
системы при торможении; Move максимально допустимая скорость системы.
Величины е„, за- даются в виде постоянных коэффициентов D устройстве 42 определения тормозного пути в гфоцессе предпусковых настроек системы.
В одном из возможных вариантов вьшолнения системы устройство определения тормозного пути может быть реализовано с помощью логико-арифметического блока 18 и порогового блока .с памятью 21, В этом случае при поступлении сигнала задания на вход устройства 42 определения тормозного пути оН сразу подается на первый вход логико-арифметического вычислительного блока 18. Последний в соответствии с выражением (1) вычисляет величину требуемой скорости . Сигнал, пропорциональный требуемой скорости , поступает с его первого выхода на вход п.орого- вого блока с памятью 21, уровень срабатывания которого пропорционале уровню насыщения регулятора 40 положения и, следовательно, максимально допустимой скорости СО макс системы. Благодаря этому логический сигнал 1 на выходе порогового блока с памятью 21 появляется лишь при больших заданиях на, перемещение, которые необходимо отрабатывать по трапецеидальной тахограмме,
С второго выхода логико-арифметического вычислительного блока 18 на аналоговый выход устройства 42 определения тормозного пути и далее на управляющий вход четвертого триг j гера 23 Ымитта поступает сигнал при котором необходимо начинать торможение в системе.
Если, СОт-р i макс логиче- . ский сигнал 0 на выходе порогового блока с памятью 21 и на втором вход логико-арифметического вычислительного блока 18 равен О, В этом случае при вычислении АЧтор принимается СОт СОт-р . Если СлЗтр а. СО макс то логический сигнал 0 -на выходе порогового блока с памятью 21 и на втором входе логико-арифметического блока 18 равен 1. В этом случае при вычислении . принимается
. W ЦП tJ Mq КС
1. .
Второе слагаемое в .выражении (1)
для АСРт-ор обеспечивает более раннее начало торможения, тем самым компенсируется инерционность контура регулирования тока в системе и
0
0
5
0
устраняется перерегулирование по положению.
Срабатывание четвертого триггера 23 Шмитта происходит по достижении ;, сигналом на его информационном входе величины, задаваемой сигналом на управляющем входе, т.е. по достижении рассогласованием по положению величины ,
Как только вьгходной сигнал первого детектора 2 достигает величины четвертый триггер 23 Шмитта срабатывает и логический сигнал 1 с его выхода через первый элемент И 24 поступает на третий управляЕо- .щий вход 38 коммутатора 6, что приводит к подключению выхода, коммутатора 6 к его третьему информационному входу 34, реверсу задания на ток электродвигателя 14 и началу торможения (на третий информационный вход 34 коммутатора 6 подано постоянное отрицательное напряжение с выхода второго источника 8 постоянного сигнала,.равное по величине заданию на максимально допустимый ток), Наличие первого элемента И 24 предотвращает принудительный реверс задания на ток при малых заданиях на перемещение, когда насыщения регулятора 41 скорости не происходит .
По мере снижения рассогласования по положению сигнал на выходе второго сумматора 31, т.е. на входе регулятора 41 скорости, становится отрицательным, перенасыщая последний. Как только перенасыщение регулятора 41 скорости заканчивается, первый триггер 19 Шмитта, работающий в области отрицательных напряжений, срабатывает и подает логический сигнал 1 на первый управляющий вход 36 5 коммутатора 6, обеспечивая подключение выхода коммутатора 6 к его первому информационному входу 32 и тем самым к выходу второго сумматора 31, т.е. к выходу регулятора 41 скорости.
Принудительный реверс задания на ток и поддержание его вплоть до перенасыщения регулятора 41 скорости обеспечивает инвариантность данной системы к величине коэффициента усиления усилителя 5 регулятора 41 скорости.
Благодаря более раннему началу торможения выход из насьпцения регу5
0
0
5
лятора А1 скорости происходит при положительных, близких к нулю скорости и рассогласованию по положе- 1ШЮ, чем обусловлено отсутствие в данной системе перерегулирования по положению при максимальном быстродействии.
Если задание на перемещение на
столько велико, т.е. 60 то Сх
макс.
и при отработке средних перемещений, с той лишь разницей, что в самом начале разгона с логического выхода блока 42 тормозного пути на первый вход второго элемента И 25 поступает логический сигнал 1. При этом величина вычисляется в соответствии с выражением (1) при условии, что 0) По достижении скоростью электродвигателя 14 величины mj сигнал датчика 18 скорости вызывает появление на выходе третьего триггера 22 Шмитта логического сигнала 1, которьй че- рез второй элемент И 25 поступает на четвертый управляющий вход 39 коммутатора 6, благодаря чему выход последнего переключается на четвертый его информационный вход 35, на ко- торый подано постоянное положительное напряжение с выхода источника 9 постоянного сигнала, равное заданию на статический ток.,Тем самым на вход регулятора 12 тока поступает задание на статический ток и разгон прекращается. При этом благодаря размыканию контура скорости форсируется процесс снижения тока, предотвращается повторное насьпцение регулятора 41 скорости при колебаниях скорости вокруг установившегося значения и исключается статическая ошибка по скорости в случае, если регулятор 41 скорости выполнен пропорциональным. По достижении рассогласованием по положению величины с выхода четвертого триггера 23 Шмитта через первый-элемент И 24 на третий управляющий вход 38 коммутатора 6 поступает логический сигнал 1, вызывающий переключение выхода коммутатора 6 на его третий информационный вход 34, В дальнейшем работа системы аналогична ее работе при отработке средних перемещений.
Данная система благодаря компенсации влияния инерционности контура регулирования тока и конечной вели
0 5 О 5
5
0
5
0
чины коэффициента усиления усилителя 5 регулятора скорости позволяет обеспечить максимальное быстродействие и отсутствие перерегулирования по положению при отработке средних и больших перемещений. Кроме того, поскольку в предлагаемом электроприводе момент перехода к торможению не зависит от коэффициента усиления усилителя 3 регулятора положения, последний может иметь линейную характеристику и настраиваться на отработку мальк рассогласований.
Формула изобретения
Система позиционного управления электроприводом,содержащая релей- ньш блок, первый, второй и третий источники постоянных сигналов,первый и второй элементы И, последовательно соединенные первый интегратор, первый сумматор и второй интегратор, а также первый и второй ключи, соединенные выходами соответственно с первым и вторым входами регулятора тока, подключенного третьим входом к вькоду датчика тока, а выходом - к входу усилителя мощности, соединенного первым выводом с первым выводом обмотки якоря электродвигателя, а вторым выводом через датчик тока - с вторым выво- водом обмотки якоря электродвигателя, вал которого кинематически связан с валами датчика скорости и датчика положения, подключенного выходом к первому входу измерителя рас-, согласования, соединенного вторым входом с выходом задатчика, а выходом - с входом первого детектора, отличающаяся тем, что, с целью повьшения быстр од е йствия системы, в нее введены второй детектор, устройство определения тормозного пути, четыре триггера Шмитта,. коммутатор, первый и второй усилители и второй сумматор, подключенный входами к выходам вторых усилителя, и интегратора, а выходом- - к входам первого и второго триггеров Шмитта и к первому информационному входу коммутатора, соединенного выходом с информационными входами обоих ключей, вторым, третьим и четвертым информационными входами - с выходами соответствующих источников постоянных сигналов, первым управляющим входом - с выходом первого триггера
Шмитта, вторым ущ авлякицим входом - с выходом второго триггера Шмитта и с первым входом первого элемента И, третьим управляющим входом - с выходом первого элемента И, и четвертым управляющим входом - с выходом второго элемента И, подключенного первым входом к логическому выходу устройства определения тормозного пути, а вторым входом - к выходу третьего триггера 1имитта, соединенного входом с вькодом второго детектора, подключенного входом к выходу датчика скорости и второму входу первого сумматора, соединен
ного выходом с входом второго усилителя, а третьим входом - с выходом первого усилителя, подключен- ного входом к выходу первого детектора, входу первого интегратора и информационному входу четвертого триггера Шмитта, соединенного выходом с вторым входом первого элемента И, а управляюр ;им входом - с аналоговым выходом устройства определения тормозного пути, подключенного входом к выходу задатчика и входу релейного блока, соединенного выходом с управляющими входами обоих ключей.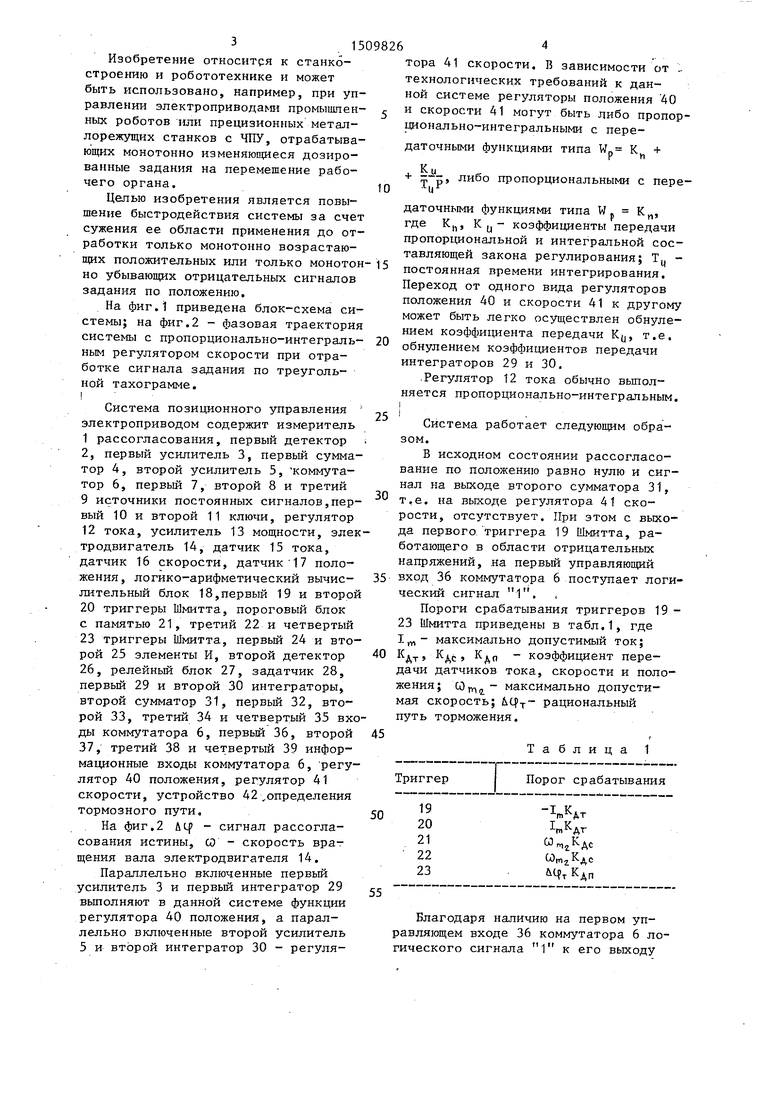
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1988 |
|
SU1594485A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления шлифовальным станком | 1984 |
|
SU1223207A1 |
Изобретение относится к станкостроению и робототехнике и может быть использовано, например, при управлении электроприводами промышленных роботов или прецизионных металлорежущих станков с ЧПУ, отрабатывающих монотонно изменяющиеся дозированные положительные (или отрицательные) задания на перемещение рабочего органа. Целью изобретения является повышение быстродействия системы за счет сужения области ее до отработки только монотонно возрастающих или только монотонно убывающих отрицательных сигналов задания по положению. Поставленная цель достигается следующим образом. Сигнал задания сравнивается с текущим значением положения вала электродвигателя и выделяется модуль полученного сигнала рассогласования. Результирующий сигнал преобразуется в ПИ-регуляторе положения и полученный сигнал сравнивается с текущим значением скорости вращения вала электродвигателя. Результат сравнения преобразуется в ПИ-регуляторе скорости и поступает на первый информационный вход коммутатора, на остальные три входа которого поступают выходные сигналы соответствующих источников постоянных сигналов. Выходной сигнал коммутатора через первый и второй ключи, состояние которых определяется знаком задающего воздействия, поступает на соответствующий вход регулятора тока, в котором сравнивается с током электродвигателя. Результат сравнения через усилитель мощности воздействует на электродвигатель, меняя положение и скорость вращения его вала. Кроме того, с помощью арифметического устройства, пяти триггеров Шмитта и двух элементов И в системе анализируются величины выходных сигналов задатчика, датчика скорости и регуляторов положения и скорости. В зависимости от этих величин подают на вход коммутатора один из сигналов, поступающих на четыре его информационные входа. 2 ил., 2 табл.
0.05
,o.c.
0,1
0.15
0,2
фил, Z
| Решлин Б.И., Ямпольский Д.С | |||
| Проектирование и наладка систем подчиненного: регулирования электроприводов | |||
| - М.: Энергия, 1975, с,153-156 | |||
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
