3
вым входом блока деления, второй |Вход которого соединен с выходом сумматора, а выход- с первым входом второго блока сравнения, второй ВХОД -которого соединен с выходом первого блока сравнения, а выход-с yinpaBляющим входом лервого ключа, вход котороро соединен с задатчиком скорости, а выход - со вторым входом регулятора скорости, третий вход которого соединен с .выходом второго ключа, управляющий вход которого соединен с выходом датчика малых рассогласований, а вход - с ВЫХОДОМ регулятора -положения задатчик полного момента соединен с токоограничивающим входом регулятора скорости и с одним из входов 1сумматора, другой вход которого соединен с выходом датчика статического .момента, первый вход которого соединен с датчиком тока, второй - с датчиком скорости.
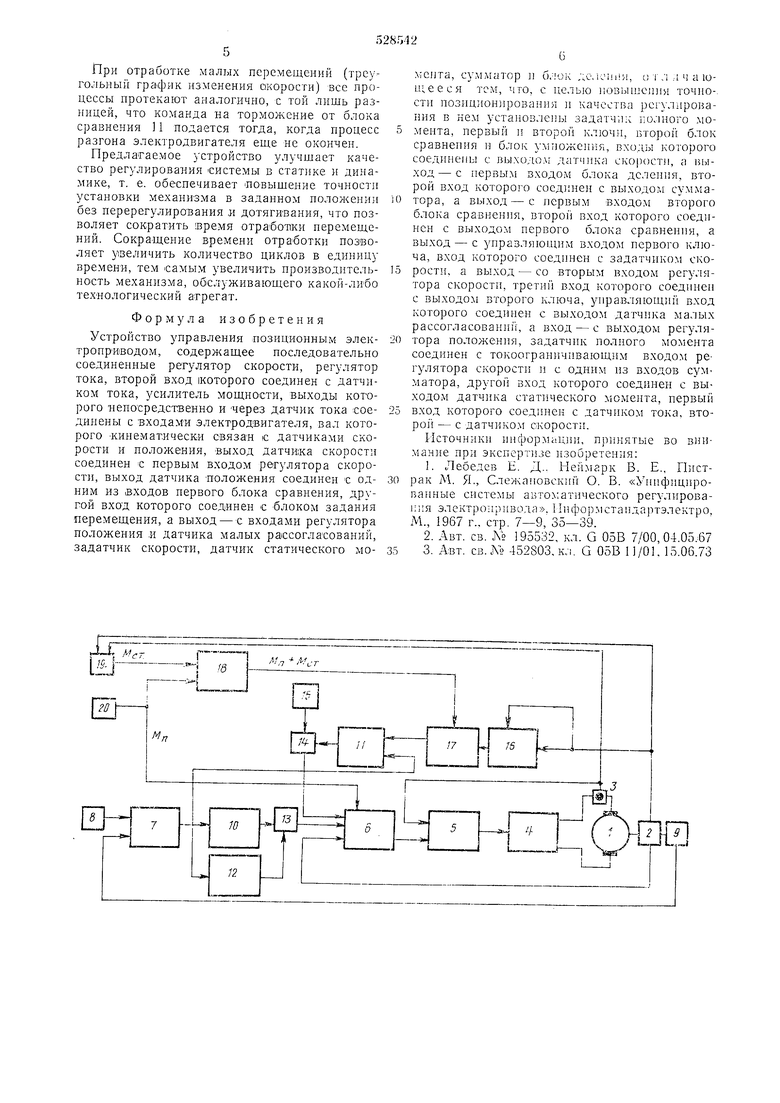
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит электродвигатель 1, датчик скорости 2, датчик тока 3, усилитель мощности 4, регулятор тока -5, регулятор скорости 6, пер.вый блок сравнения 7, блок задан.ия перемещения 8, датчик положения 9, регулятор положения 10, второй блок сравнения 11, датчик малых рассогласований 12, первый 13 и второй 14 ключи, задатчик скорости 15, блок умножения 16, блок деления 17, сумматор 18, датчик статического момента 19, задатчик полного момента 20.
Путь торможения до полной остановки электродвигателя при равнозамедленном движении определяется выражением
о J т От (U/T ,
22
так как
ш и tT К
Мп + Л1ст
К-,(1)
Sf - KiKz
Л1п+Л1стAfn-fyWcT
где Мп, MCT - соответственно полный п статический моменты электродвигателя,
/т-время торможения иополнительного органа от скорости п до полной остановки, K,i, Kz-коэффициенты пропорциональности,
со - угловая icKopocTb электродвигателя,
п-скорость электродвигателя. Зависимость (1) реализуется с ломощью блоков умножения 16 и блоков деления 17 подачей на вхо.д блока умножения 16 сигнала, пропорционального скорости, и на вход блока деления 17 - сигнала, пропорционального сумме ПОЛНОГО и статического моментов с выхода сумматора 18. В результате на выходе блока деления 17 образуется сигнал, пропорциональный тормозному пути. Напряжение задат4
чи-ка -полного момента 20 пропорционально полному моменту электродвигателя, так как оно одновременно является уставкой токоограиичения регулятора скорости 6. 5 Устройство работает следующим образом. Нри 1подаче сигнала на необходимое перемеп eи.Иe от блока задания .перемещения 8 )ia выходе первого блока сравнения 7 (который может быть ди-скретпо-аналоговым или сель10 синной парой с фазочувствительным .выпрямителем) возникает сигнал, который поступает на входы датчика малых рассогласований -12 и второго блока сравнения 11. Датчик малых рассогласований подает сигнал иа управляю13 щий вход первого ключа, который отключает выход регулятора положения 10 от входа регулятора скорости 6.
Второй блок сравнения 11 подает сигнал на управляющий вход второго ключа 14 и подключает задатчик скорости (и-сточннк напряжения) ilS ко входу регулятора скорости 6. На выходе регулятора скорости 6 возникает сигнал, величина которого определяется уровнем сигнала, поступающего .на токоограни-чи5 вающий вход регулятора скорости от задатчика ПОЛНОГО момента 20. Сигнал на выходе регулятора скорости 6 определяет величину полного то1ка в момент разгона и воздействует через регулятор тока 5 и усилитель мощности
0 4 на электродвигатель. В процессе перемещен.ия электродвигателя 1 сигнал с выхода датчика положения 9 увеличивается, вследствие чего на выходе первого блока сравнения 7 сигнал увеличивается. Одновременно на входы блока умножения 16 и блока деления 17 поступают сигналы с выходов датчика скорости 2 и сумматора 18. Блок умножения 16 и блок деления 17 производят обработку поступающих сигналов согласно выражению (1).
0 Разгон электродвигателя продолжается до скорости, определяемой уровнем сигнала от задатчика скорости 15. Дальнейщая отработка перемещения будет выполняться при постоянной скорости электродвигателя 1. Когда,
5 уменьщаясь, сигнал на выходе первого блока сравнения 7 станет равным сигналу на выходе блока деления 17, ключ 14 отключит задатчик скорости 15 от регулятора скорости 6. На вход регулятора скорости 6 будет поступать только сигнал с датчика скорости 2. Нод действием этого сигнала электродвигатель 1 перейдет в режим торможения, интенсивность которого определяется суммой полного и статического моментов.
5 Когда сигнал на выходе-первого блока сравнения 7 станет близким к нулю, то датчиК малых рассогласований 12 через первый ключ подключит регулятор положения 10 к регулятору скорости 6. Тем самым устройство замO кнется по положению (введется в действие третий контур регулирования),чем достигается высокая точность установки исполнительного органа в заданное положение и сохранение этого положения при воздействии внещ
них возмуо.;ений на исполнительный орган.
При отработке малых перемещений (треугольный график нзменення акорости) все процессы протекают аналогично, с той лишь разницей, что команда на торможение от блока сравнения 11 подается тогда, когда процесс разгона электродвигателя еще не окончен.
Предлагаемое устройство улучшает качество регулирования системы в статике и динамике, т. е. обеспечивает -повышение точности установки механизма в заданном положении без перерегулирования .и дотягивания, что позволяет сократить время отработ1ки перемещений. Сокращение времени отработки позволяет увеличить количество циклов в единицу времени, тем самым увеличить производительность механизма, обслуживающего какой-либо технологический агрегат.
Формула изобретения
Устройство управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор тока, второй вход которого соединен с датчиком тока, усилитель мощности, выходы которого непосредственно и через датчик тока соединены с входами электродвигателя, вал которого Кинематически связан с датчиками скорости и положения, выход датчика скорости соединен с первым входом регулятора скорости, выход датчика ноложения соединен с одним из входов первого блока сравнения, другой вход которого соединен с блоком задания перемещения, а выход-с входами регулятора положения и датчика малых рассогласований, задатчик скорости, датчик статического момента, сумматор и о.чок ;;c,, о т ;i л ч а ющ е е с я тем, что, с целью 11овын:с 1ия точно-, стн позиционирования и качества регулирования в нем установлены задатчик полного момента, первый и второй ключи, второй блок сравнения и блок умноженная, входы которого соединены с выходом датчика civOpocTJi, а выход - с первым входом блока деления, второй вход которого соединен с выходом сумматора, а выход-с первым входом второго блока сравнения, второй вход которого соединен с выходом первого блока сравнения, а выход - с управляющим входом первого ключа, вход которого соедпнен с задатчиком скорости, а выход - со вторым входом регулятора скорости, третий вход которого соединен с выходом второго ключа, управляющий вход которого соединен с выходом датчика малых рассогласован, а вход - с выходом регулятора положения, задатчик полного мo ieнтa соединен с токоограничнвающим входом регулятора скорости и с одним из входов сум. матора, другой вход которого соединен с выходом датчика статического момента, первый
вход которого соединен с датчиком тока, втоpoii - с датчиком скорости.
Источники информации, принятые во внимание при экспертизе изобретения:
1.Лебедев Е. Д.. Пеймарк В. Е., Пистрак М. Я., Слежаповский О. В. «Унифицированные системы автоматического регулирования электропривода. Информстапдартэлектро, М., 1967 г.. стр. 7--9, 35-39.
2.Авт. СБ. АО 195532, кл. G 05В 7/00,04.05.67 3. Авт. св. Ль 452803, кл. G 05В 11/01, 15.06.73
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления позиционнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU798695A1 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Устройство для управления промышленным роботом | 1982 |
|
SU1029136A1 |
| Устройство управления позиционнымпРиВОдОМ | 1979 |
|
SU847278A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
