Изобретение относится к электротехнике, в частности к электроприводу и может быть использовано в системах и устройствах, где требует ся экстренное торможение, например в позиционном приводе, в приводах робототехннк и т.д. Извесуно устройство для торможения вентильного электродвигателя, содержащее преобразователь частоты, цепи управления ключей которого свя заны с выходом многоканального датч ка положения ротора через последовательно соединенные управляемый блок ЗАПРЕТ и блок формирования сиг налов правого и левого направления вращения, управляющий вход которого подключен к выходу логической схемы ИСКгаОЧАЮЩЕЕ ИЛИ, к двум входам логи ческой схемы ИСКЛЮЧАКЩЕЕ ИЛИ.подклю чены выход задатчика направления вр щения и выход триггера команд Пуск и Стоп, датчик нулевой скорости вращения, выход которого связан с управляющим входом блока ЗАПРЕТ lj Недостатком известного технического решения является низкая надежность, обусловленная возможностью свободных двшкений индуктора после ос:танова, которые могут возникнуть под действием изменяющихся моментов нагрузки на валу электродвигателя. Наличие свободных движений вентильного электродвигателя в режиме оста нова может привести к неработоспосо ности приводных устройств, например позиционнь х приводов, приводов робртотехники и т.д. Наиболее близким к изобретению является устройство для управления вентильным электродвигателем, .содержащее датчик положения ротора с двумя комплектами чувствительных элементов, каждьй из которых подклю чен к соответств ощему датчику направления вращения, блок сравнения с двумя входами, первый из которых подключен к выходу одного из датчи крв направления, вращения, блок запрета с информационным и управляющи входами, блок формирования сигналов Вперед - назад с управляющим и за прещаннцим входами, переключатели команд Вперед - назад, Пуск стоп, первый управляемый инвертор, информационным входом подключенньй к выходу переклкяателя команд Вперед - назад, управляющим входом 92к выходу переключателя команд Пуск входом блока ЗАПРЕТ, информационный вход которого связан с выходом блока управления, а выход блока ЗАПРЕ подключен к запрещающему входу блока формирования сигналов Вперед назад, с которым соединен по крайней мере один из комплектов чувствительных элементов датчика положения 2 . Недостаток этого технического решения- низкая надежность, обусловленная возможностью свободных движений индуктора после останова, вызьюаемых действием изменяющегося момента нагрузки на валу электродвигателя, низкой, точностью и большим временем останова, обусловленного наличием непрогнозирущуюго выбега после отключения электродвигателя от источника энергии при останове. Целью изобретения является повышение точности и уменьшение времени останова путем исключения выбега ротора вентильного электродвигателя после его отключения. Поставленная цель достигается тем, что устройство для правления вентильным электродвигателем, содержащее датчик положения ротора с двумя комплектами чувствительных элементов, каждьй из которьк подключен к соответствующему датчику направления вращения, блок сравнения с двумя входами, пёрвьй и,з которых подключен к выходу одного из датчиков направления вращения, блок запрета с информационным и управляющим входами, блок формирования сигналов Вперед - назад с управляющим и запрещающим входами, переклкматели команд Вперед - назад и Пуск - стоп, пёрвьй управляемьй инвертор, информационным входом подключенный к выходу переключателя команд Вперед - назад, управляющим входом - к выходу переключателя команд Пуск - стоп, соединенному с управляющим входом блока ЗАПРЕТ, информационный вход которого соединен с выходом блока сравнения, а вькод блока ЗАПРЕТ подключен к запрещающему входу блока формирования сигналов Вперед - назад, с ко- торым соединен по крайней мере один .комплект чувствительных элементов датчика положения, введены второй и третий управляемые инверторы, два четырехвходовых сумматора, причем выход второго датчика направления вращения подключен к второму входу блока сравнения, с выходом первого инвертора соединен информационный вход второго инвертора, выходом связанного с информационным входом третьего инвертора, выход которого подключен к управляющему входу блока формирования сигнала, Вперед - назад, первые и вторые входы сумматоров соединены с выходами первого и второго датчиков направления вращения соответственно, третьи входы сумматоров с выходом переключателя команд Впе.ред - назад, выход переключателя команд Пуск - стоп подключен к четветым входам сумматоров, выход калдого сумматора соединен с управлякнцим входом одного из введенных, соответствзкяцего данному сумматору, управляемого инвертора.
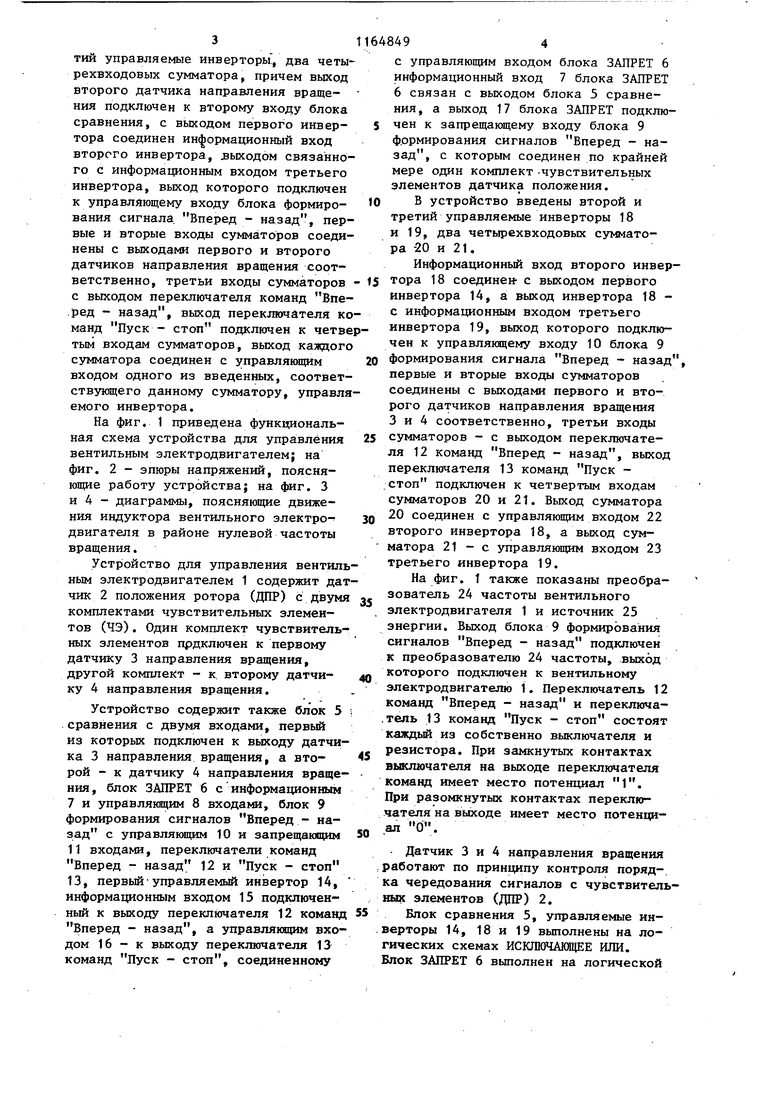
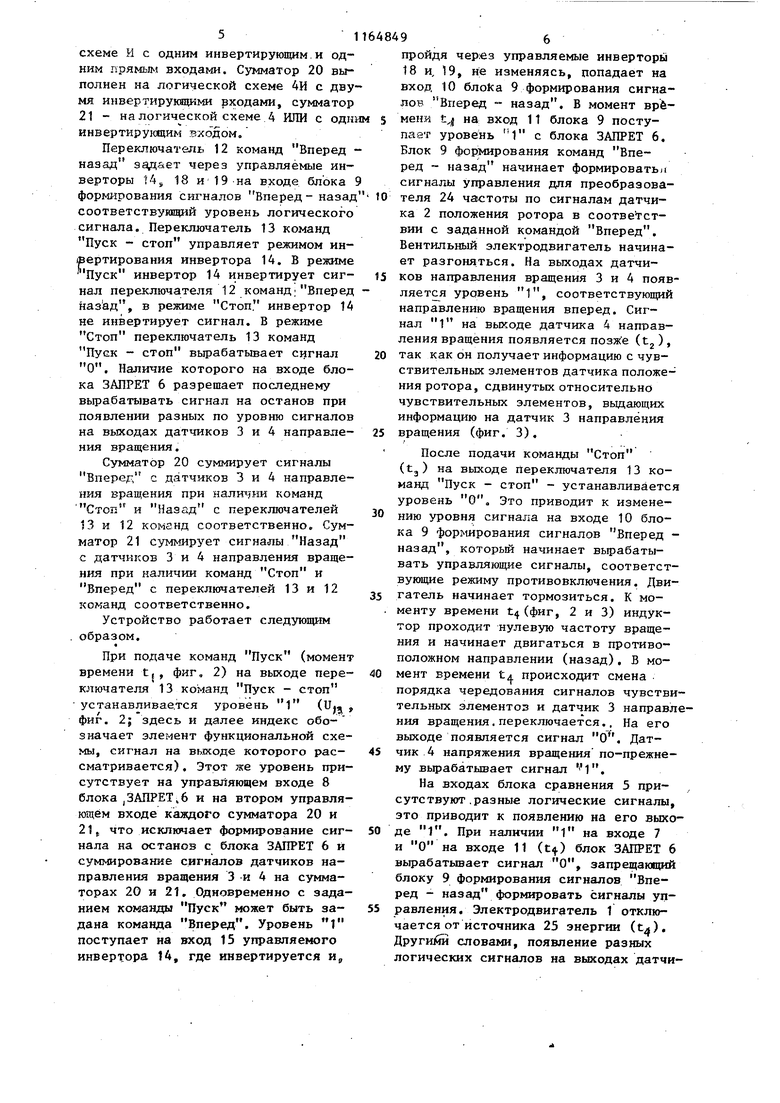
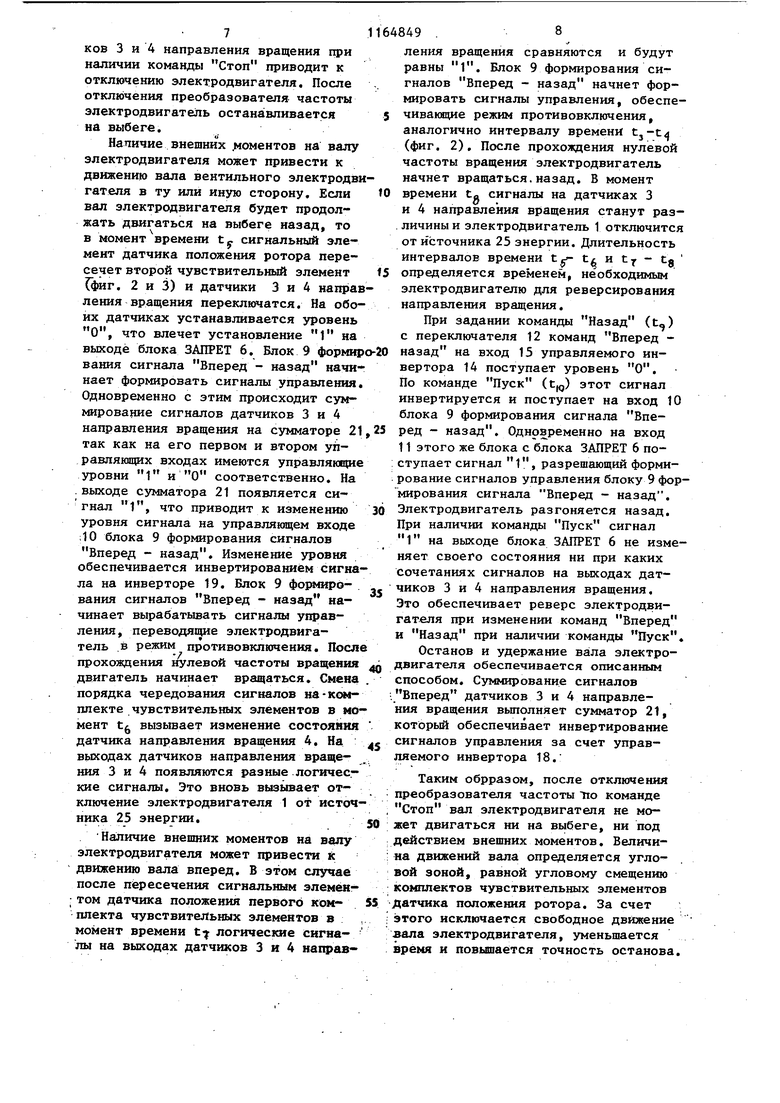
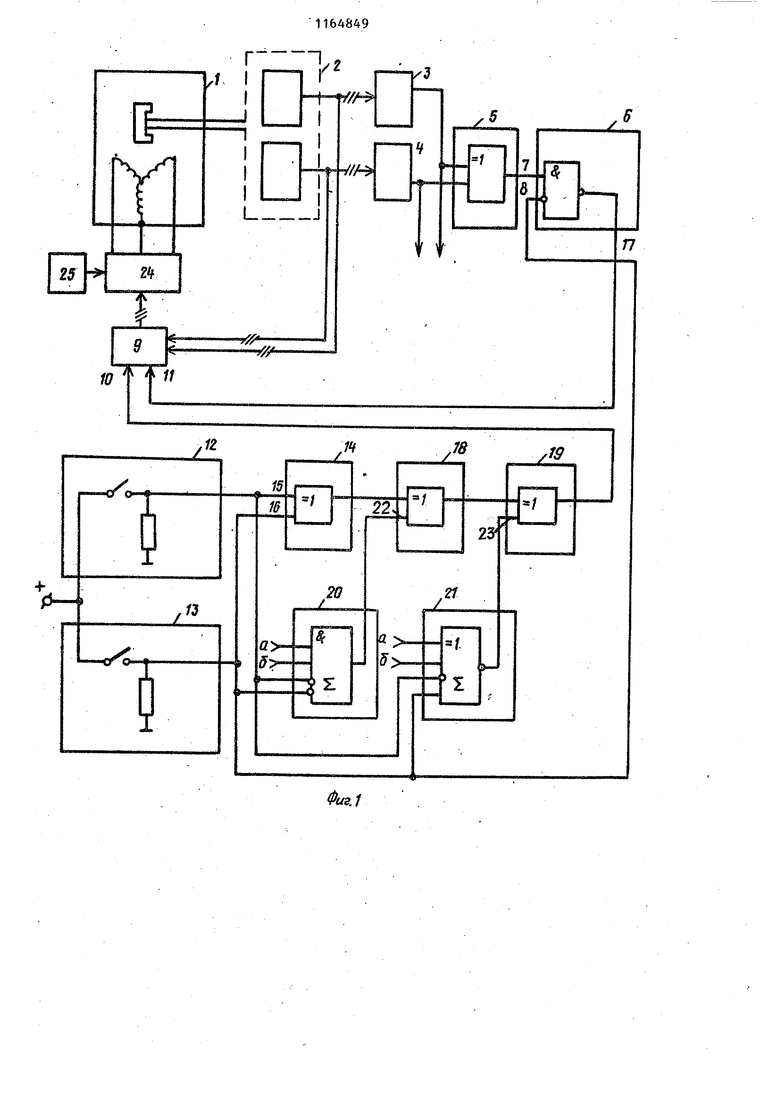
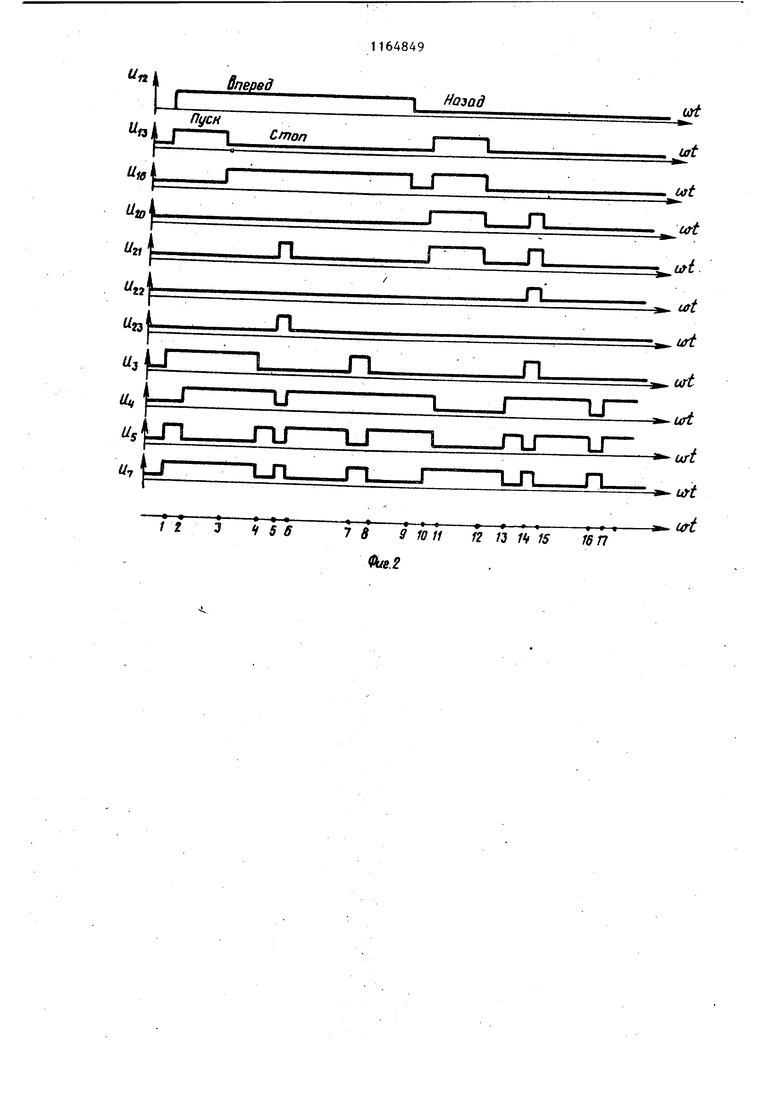
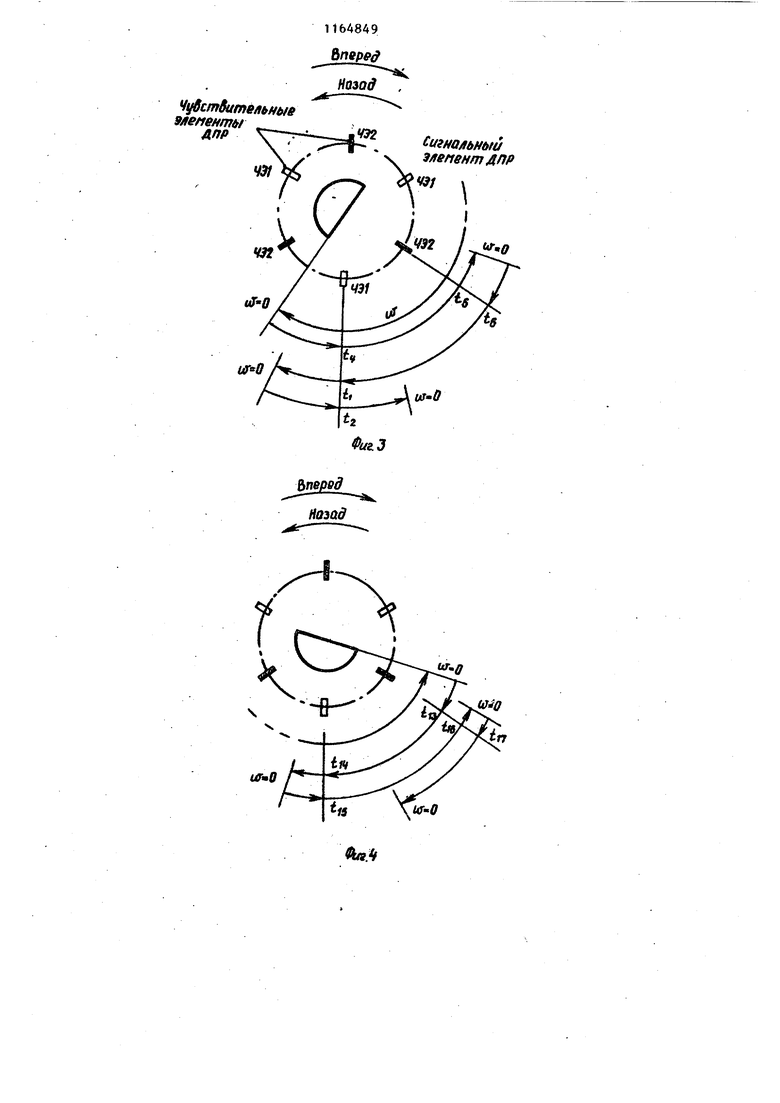
На фиг. 1 приведена функциональная схема устройства для управления вентильным электродвигателем; на фиг. 2 - эпюры напряжений, поясняющие работу устройства; на г. 3 и 4 - диаграммы, поясняннцие движения индуктора вентильного электродвигателя в районе нулевой частоты вращения.
Устройство для управления вентильным электродвигателем 1 содержит датчик 2 положения ротора (ДПР) с двумя комплектами чувствительных элементов (ЧЭ). Один комплект чувствительных элементов прдключен к первому датчику 3 направления вращения, другой комплект - к второму датчику 4 направления вращения.
Устройство содержит также блок 5 сравнения с двумя входами, первьй из которых подключен к выходу датчика 3 направления вращения, а второй - к датчику 4 направления вращения, блок ЗАПРЕТ 6 с информационным 7 и управляющим 8 входами, блок 9 формирования сигналов Вперед - назад с управляющим 10 и запрещающим 11 входами, переключатели команд Вперед - назад 12 и Пуск - стоп 13, первыйуправляемый инвертор 14, информационным входом 15 подключенный к выходу переключателя 12 команд Вперед - назад, а управляющим входом 16 - к выходу переключателя 13 команд Пуск - стоп, соединенному
с управляющим входом блока ЗАПРЕТ 6 информационный вход 7 блока ЗАПРЕТ 6 связан с выходом блока 5 сравнения , а выход 17 блока ЗАПРЕТ подключен к запрещаклцему входу блока 9 формирования сигналов Вперед - назад, с которым соединен по крайней мере один комплект -чувствительных элементов датчика положения.
В устройство введены второй и третий управляемые инверторы 18 и 19, два четьфехвходовых cjT iaTOра -20 и 21.
Информационный вход второго инвертора 18 соединен- с выходом первого инвертора 14, а выход инвертора 18 с информационным входом третьего инвертора 19, выход которого подключен к управлякщему входу 10 блока 9 формирования сигнала Вперед - назад первые и вторые входы сумматоров соединены с выходами первого и второго датчиков направления вращения 3 и 4 соответственно, третьи входы сумматоров - с выходом переключателя 12 команд Вперед - назад, выход переключателя 13 команд Пуск стоп подключен к четвертым входам сумматоров 20 и 21. Выход сумматора 20 соединен с управляющим входом 22 второго инвертора 18, а выход сумматора 21 - с управляющим входом 23 третьего инвертора 19.
На фиг. 1 также показаны преобразователь 24 частоты вентильного электродвигателя 1 и источник 25 энергии. Выход блока 9 формирования сигналов Вперед - назад подключен к преобразователю 24 частоты, выход которого подключен к вентильному электродвигателю 1. Переключатель 12 команд Вперед - назад и переключа.тель 13 команд Пуск - стоп состоят Каждый из собственно выключателя и резистора. При замкнутых контактах выключателя на выходе переключателя команд имеет место потенциал 1. При разомкнутых контактах переключателя на выходе имеет место потенци.ал О.
Датчик 3 и 4 направления вращения работают по принципу контроля порядка чередования сигналов с чувствителных элементов (ДПР) 2.
Блок сравнения 5, управляемые инверторы 14, 18 и 19 выполнены на логических схемах ИСКЛЮЧАНЛЦЕЕ ИЛИ. Блок ЗАПРЕТ 6 выполнен на логической схеме И с одним инвертирующим.и одним лрямьлч входами. Сумматор 20 выполнен на логической схеме 4И с дву мя инвертирукадими рходами, сумматор 21 - на логической схеме А ИЛИ с одн инвертирующим входом, Переключатель 12 команд Вперед назад задает через управляемые инверторы 14J 18 и 19 на входе блока формирования сигналов Вперед- назад соответствующий уровень логического сигнала. Переключатель 13 команд Пуск - стоп управляет режимом инвертирования инвертора 14. В режиме инвертор 14 инвертирует сигнал переключателя 12 команд; Вперед назад, в режиме Стоп инвертор 14 не инвертирует сигнал. В режиме Стоп переключатель 13 команд Пуск - стоп вырабатывает сигнал О. Наличие которого на входе блока ЗАПРЕТ 6 разрешает последнему вырабатывать сигнал на останов при появлении разных по уровню сигналов на выходах датчиков 3 и 4 направления вращения. Сумматор 20 суммирует сигналы Вперед с датчиков 3 и 4 направления вращения при команд и Назад с переключателей 13 и 12 команд соответственно. Сумматор 21 суммирует сигналы Назад с датчиков 3 и 4 направления вращения при наличии команд Стоп и Вперед с переключателей 13 и 12 команд соответственно. Устройство работает следующим образом. При подаче команд Пуск (момент времени tj, фиг, 2) на выходе переключателя 13 команд Пуск - стоп устанавливается уровень 1 (U| фиг. 2; здесь и далее индекс обозначает элемент функциональной схемы, сигнал на выходе которого рассматривается) . Этот же уровень присутствует на управляющем входе 8 блока ,ЗАПРЕТ.6 и на втором управляющем входе каждого сумматора 20 и 21s что исключает формирование сигнала на останов с блока ЗАПРЕТ 6 и суммирование сигналов датчиков направления вращения 3 и 4 на сумматорах 20 и 21. Одновременно с заданием команды Пуск может быть задана команда Вперед, Уровень 1 поступает на вход 15 управляемого инвертора 14, где инвертируется к. пройдя чер.ез управляемые инверторы 18 и, 19, не изменяясь, попадает на вход 10 блоЛа 9 формирования сигналов Вперед - назад, Б момент времени t,j на вход 11 блока 9 поступает уровень 1 с блока ЗАПРЕТ 6. Блок 9 формирования команд Вперед - назад начинает формироватьи сигналы управления для преобразователя 24 частоты по сигналам датчика 2 положения ротора в соотвегст- ВИИ с заданной командой Вперед, Вентильный электродвигатель начинает разгоняться. На выходах датчиков направления вращения 3 и 4 появляется уровень 1, соответствующий направлению вращения вперед. Сигнал 1 на выходе датчика 4 направления вращения появляется позже (t2 ) , так как он получает информацию с чувствительных элементов датчика положения ротора, сдвинутых относительно чувствительных элементов, выдающих информацию на датчик 3 направления вращения (фиг. 3). После подачи команды Стоп (tj) на выходе Переключателя 13 команд Пуск - стоп - устанавливается уровень О, Это приводит к изменению уровня сигнала на входе 10 блока 9 формирования сигналов Вперед назад, который начинает вьфабатывующие режиму противовключения. Двигатель начинает тормозиться. К моменту времени t4(фиг, 2 и 3) индуктор проходит нулевую частоту вращения и начинает двигаться в противоположном направлении (назад), В момент времени t происходит смена порядка чередования сигналов чувствительных элементов и датчик 3 направления вращения.переключается., На его выходе появляется сигнал . Датчик .4 напряжения вращения по-прежнему вырабатывает сигнал 1. На входах блока сравнения 5 присутствуют .разные логические сигналы, это приводит к появлению на его выходе 1. При наличии 1 на входе 7 и О на входе 11 (t) блок ЗАПРЕТ 6 вырабатьшает сигнал О, запрещающий блоку 9 формирования сигналов Вперед - назад формировать сигналы управления. Электродвигатель 1 отключается от источника 25 энергии (t), ДругиЙ словами, появление разных логических сигналов на выходах датчиков 3 и 4 направления вращения при наличии команды Стоп приводит к отключению электродвигателя. После отклк1чения преобразователя частоты электродвигатель останавливается на выбеге. Наличие внешних ;4оментов на валу электродвигателя может привести к движению вала вентильного электродви гателя в ту или иную сторону. Если вал электродвигателя будет продолжать двигаться на выбеге назад, то в момент времени tj. сигнальный элемент датчика положения ротора пересечет второй чувствительный элемент (фиг. 2 и 3) и датчики 3 и 4 направ ления вращения переключатся. На обоих датчиках устанавливается уровень О, что влечет установление 1 на выходе блока ЗАПРЕТ 6. Блок 9 формир вания сигнала Вперед - назад начинает формировать сигналы управления. Одновременно с этим происходит суммирование сигналов датчиков 3 и 4 направления вращения на сумматоре 21 так как на его первом и втором управляющих входах имеются управляющие уровни 1 и О соответственно. На выходе сумматора 21 появляется сигнал Г что приводит к изменению уровня сигнала на управляющем входе ;10 блока 9 формирования сигналов Вперед - назад. Изменение уровня обеспечивается инвертированием сигна ла на инверторе 19. Блок 9 формирования сигналов Вперед - назад начинает вырабатывать сигналы управления, переводящие электродвигатель в режим противовключения. Посл прохождения нулевой частоты вращения двигатель начинает вращаться. Смена порядка чередования сигналов на-комплекте чувствительных элементов в мо мент t вызывает изменение состояния датчика направления вращения 4. На вькодах датчиков направления вращения 3 и 4 появляются разные.логические сигналы. Это вновь вызывает отключение электродвигателя 1 от источ ника 25 энергии. Наличие внешних моментов на валу электродвигателя может привести к движению вала вперед. В этом случае после пересечения сигнальным элементом датчика положения первого комппекта чувствительных элементов в момент времени t логические сигналы на выходах датчиков 3 и 4 направ- 49 .8 ления вращения сравняются и будут равны 1. Блок 9 формирования сигналов Вперед - наэад начнет формировать сигналы управления, обеспечивакяцие режим противовключения, аналогично интервалу времени (фиг. 2). После прохождения нулевой частоты вращения электродвигатель начнет вращаться.наэад. В момент времени to сигналы на датчиках 3 и 4 направления вращения станут различины и электродвигатель 1 отключится от источника 25 энергии. Длительность интервалов времени t t и t - tg определяется временем, необходимым электродвигателю для реверсирования направления вращения. При задании команды Назад (ц) с переключателя 12 команд Вперед назад на вход 15 управляемого инвертора 14 поступает уровень О. По команде Пуск (t) этот сигнал инвертируется и поступает на вход 10 блока 9 формирования сигнала Вперед - назад. Одновременно на вход 11 этого же блока с блока ЗАПРЕТ 6 поступает сигнал 1, разрешающий формирование сигналов управления блоку 9 фор- мирования сигнала Вперед - назад. Электродвигатель разгоняется назад. При наличии команды Пуск сигнал 1 на выходе блока ЗАПРЕТ 6 не изменяет своего состояния ни при каких сочетаниях сигналов на выходах датчиков 3 и 4 направления вращения. Это обеспечивает реверс электродвигателя при изменении команд Вперед и Назад при наличии команды Пуск, Останов и удержание вала электродвигателя обеспечивается описанным способом. Суммирование сигналов Вперед датчиков 3 и 4 направления вращения выполняет сумматор 21, который обеспечивает инвертирование сигналов управления за счет управляемого инвертора 18. Таким обрразом, после отключения преобразователя частоты По команде Стоп вал электродвигателя не может двигаться ни на выбеге, ни под действием внешних моментов. Величина движений вала определяется угловой зоной, равной угловому смещению комплектов чувствительных элементов датчика положения ротора. За счет -этого исключается свободное движение дала электродвигателя, уменьшается время и повышается точность останова.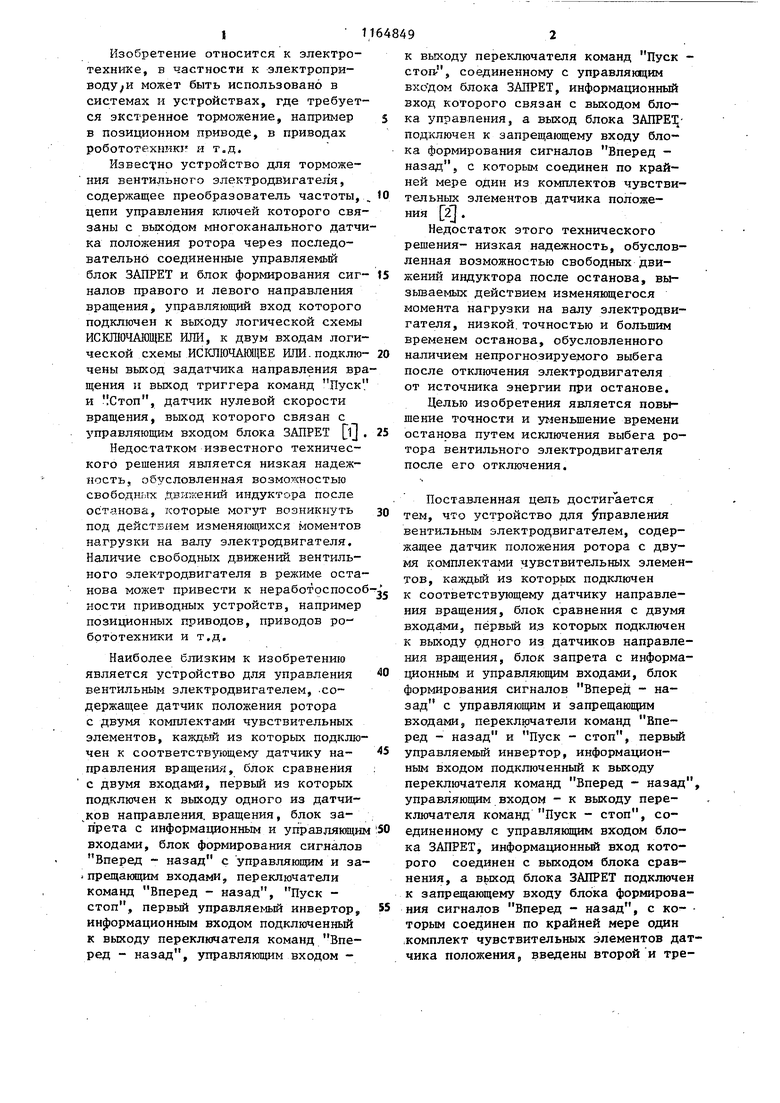
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1095321A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1135002A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Лентопротяжный механизм | 1979 |
|
SU868830A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1007162A1 |
| Вентильный электропривод | 1985 |
|
SU1317630A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Двухдвигательный электропривод | 1984 |
|
SU1249687A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕВНЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, содер жащее датчик положения ротора с двумя комплектами чувствительных элементов, каждый из которых подключен к соответствукцему датчику направления вращения, блок сравнения с двумя входами, первый из которых подключен к выходу одного из датчиков на- щ авления вращения, блок запрета с информационньм и управляющим входами, блок формирования сигналов Вперед - назад с управляющим и запрещающий входам, переключатели ко-, манд Вперед - назад и Пуск - стоп, первый управляемый инвертор, информационным входом подключенный к выходу переключателя команд Вперед - назад, управлянш(им входом - к выходу переключателя команд Пуск - стоп, соединенному с управляющим входом блока ЗАПРЕТ, информационный вход которого связан с выходом блока сравнения, а выход блока ЗАПРЕТ подключен к запрещающему входу блока формирования сигналов Вперед - назад, с кото1н м соединен по крайней мере один из комплектов чувствительных элементов датчика положения, отличающее с я тем, что, с целью повышения точности и уменьшения времени останова за счет исключения выбега ротора вентильного электродвигателя nor VO еле отключения, введены второй и третий управляемый инверторы, два четырехвходовых сумматора, причем выход второго датчика направления вращения подключен к второму входу .блока сравнен11я, с выходом первого инвертора соединен информационный вход второго инвертора, выходом свя;занного с информационным входом треть9д 4 90 его инвертора, выход которого подклютчей к управляющему входу блока формирования сигнала Вперед - назад, iU CD первые и вторые входы сумматоров соединены с выходами первого и второго датчиков направления вращения соответственно, третьи входы сумматоров - с выходом переключателя команд /Вперед - назад, выход переключателя команд стоп подключен к четвертым входам сумматоров, выход калдого сумматора соединен с управ.лянщим входом одного из введенных, соответствующего данному сумматору, инвертора.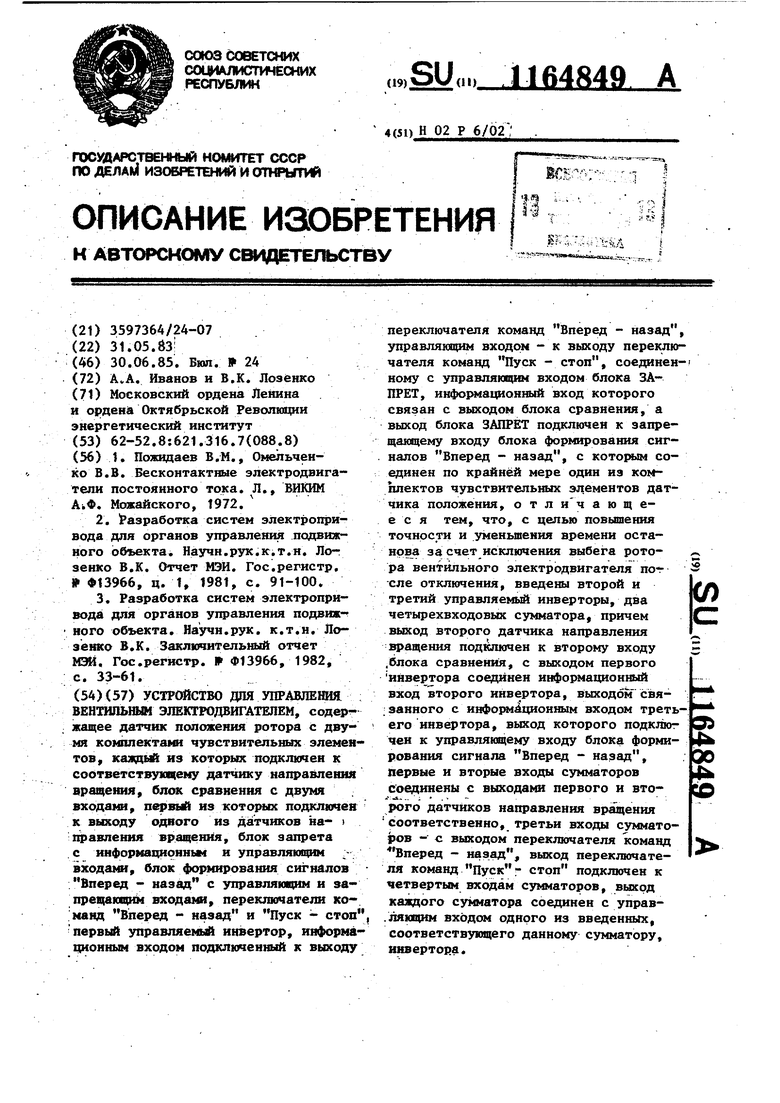
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пожидаев В.М., Омельченко В.В | |||
| Бесконтактные электродвигатели постоянного тока | |||
| Л., ВИКИМ А.Ф | |||
| Можайского, 1972 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| азработка систем электропривода для органов управления подвижного объекта | |||
| Назгчн.рук.к.т.н | |||
| Лозенко В.К | |||
| Отчет МЭИ | |||
| Гос.регистр | |||
| Многокамерная газовая печь непрерывного действия | 1927 |
|
SU13966A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Научн.рук | |||
| к.т.н | |||
| Лозенко В.К | |||
| Заключительный отчет май | |||
| Гос.регистр | |||
| Многокамерная газовая печь непрерывного действия | 1927 |
|
SU13966A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
