2. Устройство по п. 1, отличающееся тем, что механизм поворота контейнера выполнен в виде двух расположенных друг в друге и шарнирно связанных между собой рамок, при этом ось вилки поворота контейнера установлена с возможностью осевого перемещения в. упруго подвешенной во внутренней рамке
Крестовине, причем внутренняя рамка установлена на наружной, а наружная - на стойке с возможностью перемещения внутренней рамки в двух взаимно перпендикулярных напр влениях посредством винтовых передач, снабженных индивидуальными при- водами с прогрс1ммным устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вибрационной обработки | 1981 |
|
SU975352A1 |
| Устройство для поштучной выдачи плоских заготовок | 1983 |
|
SU1098630A1 |
| Плоскорешетный сепаратор | 1976 |
|
SU749454A1 |
| ПРОФИЛЕГИБОЧНЫЙ СТАН | 2004 |
|
RU2276627C1 |
| Фрикционный вариатор | 1982 |
|
SU1203273A1 |
| ВЫКЛЮЧАТЕЛЬ | 1971 |
|
SU298967A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ ПОЛИМЕРНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2598981C1 |
| УСТРОЙСТВО СВЕРЛИЛЬНО-ФРЕЗЕРНОЕ УСФ | 2006 |
|
RU2309821C1 |
| Производственный модуль для штамповочных работ | 1988 |
|
SU1685576A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
1. УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ ОБРАБОТКИ, содержащее станину, стойку и сферический контейнер, установленный посредством роликовых .опор в двух вилках, одна из которых ведущая - кинематически связана с установленным на станине механизмом ЦЧ вращательного движения контейнера, а другая снабжена осью, кинематически связанной со смонтированным на стойке механизмом поворота контейнера, при этом ведущая вилка снабжена выполненными в виде осей направляющими, роликовые опоры жестко связаны с ползунами,установленными на направляющих посредством подпружиненных втулок, отличающееся тем, что, с целью интенсификации процесса цбраёотки, направляющие выполнены из немагнитного материала, снабжены прикрепленными к вилкам стаканами с соленоидными катушками, при этом втулки ползунов размещены внутри стаканов.. «g (Л с 4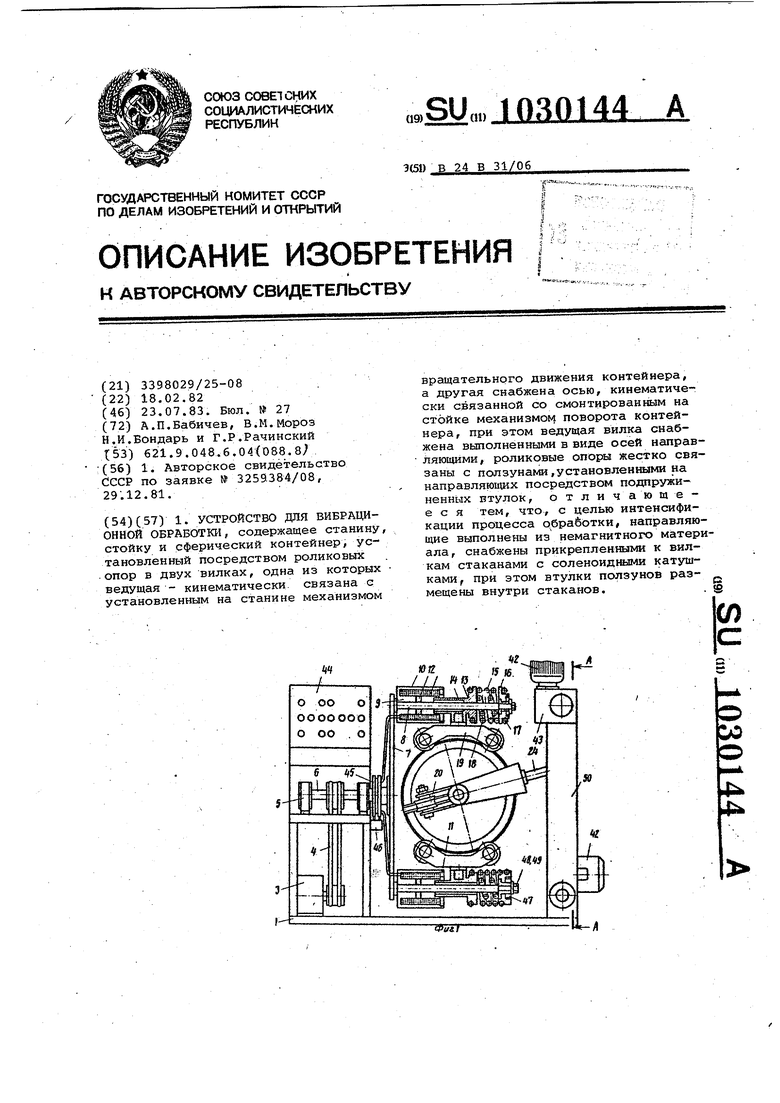
Изобретение относится к машиностроению и приборостроению и может быть использовано для отделки зачистки, очистки, упрочнения деталей подготовки их под покрытия, для снятия внутренних напряжений в деталях
Известно устройство для вибрационной обработки, содержащее станину, стойку и сферический контейнер, установленный посредством роликовых опор в двух вилках, одна из которых ведущая - кгнематически связана с установленным на станине механизмом вращательного движения контейнера, а другая снабжена осью, кинематически связанной со смонтированным На стойке механизмом поворота контейнера, при этом ведущая вилка снабжена выполненными в виде осей напраляющими, а роликовые опоры жестко связаны с ползунами, установленными на направляющих посредством подпружиненных втулок flTНедостатком известного устройства является низкая интенсивность обработки, обусловленная тем, что обрабатывающее воздействие на загрузку контейнера оказывается Только его вращением и поворотом.
Цель изобретения - интенсификация процесса обработки.
Поставленная цель достигается тем, что в устройстве для вибрационной обработки, содержащем станину, стойку и сферический контейнер, установленный посредством роликовых опор в двух вилках, одна из котюрых ведущая - кинематически связана с установленным на статине механизмом вращательного движения контейнера, а другая снабжена осью, кинематически связанной со смонтированным на стойке механизмом поворота контейнера, ведущая вилка, снабжена выполненными в-виде осей направляющими/ а роликовые опоры жестко связаны с ползунами, установленными на направляющих посредством подпружиненных втулок, причем направляющие выполнены из Немагнитного материала, снабжены прикрепленными к вилкам стаканами с соленоидными катушками, при этом втулки ползунов размещены
внутри стаканов.
Кроме того, механизм поворота контейнера выполнен в виде двух расположенных друг в друге и шарнирно связанных между собой рамок, при
О этом ось вилки поворота контейнера .установлена с возможностью осевого перемещения в упруго подвешенной во внутренней рамке крестовине, причем внутренняя рамка установлена
5 на наружной, а наружная - на стойке с возможностью перемещения внутренней рамки в двух взаимно перпендикулярных направлениях посредством винтовых передач, снабженных индивидуальными приводами с программным
устройством.
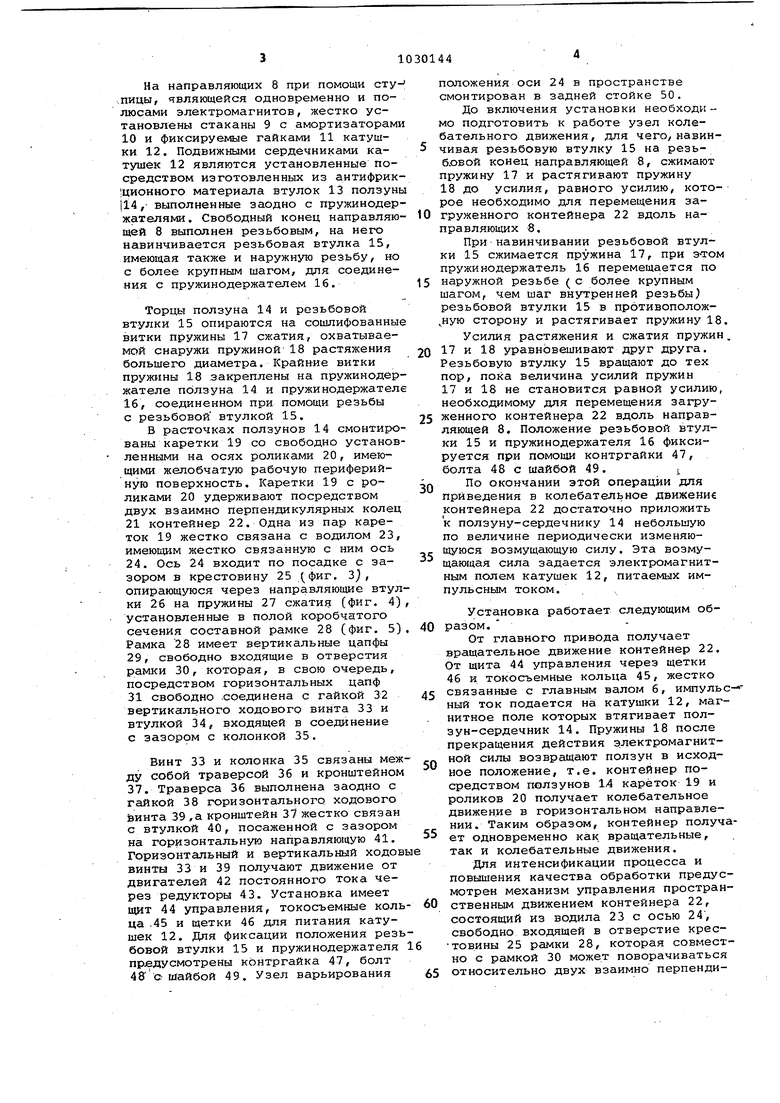
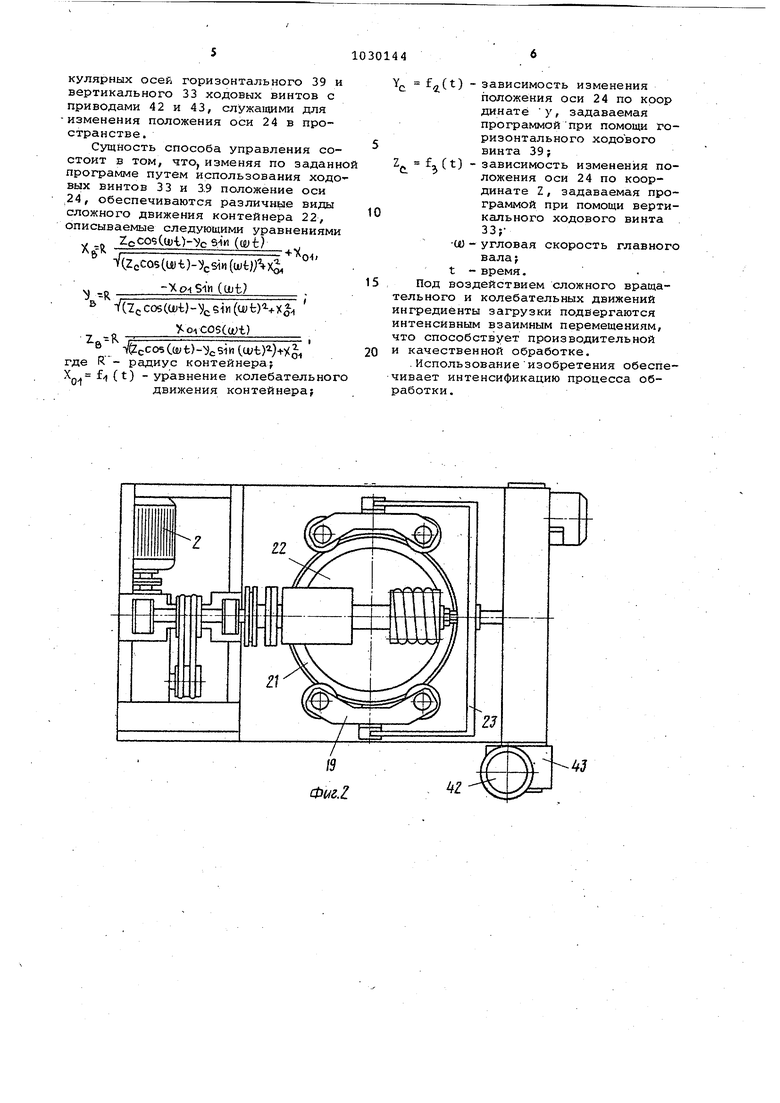
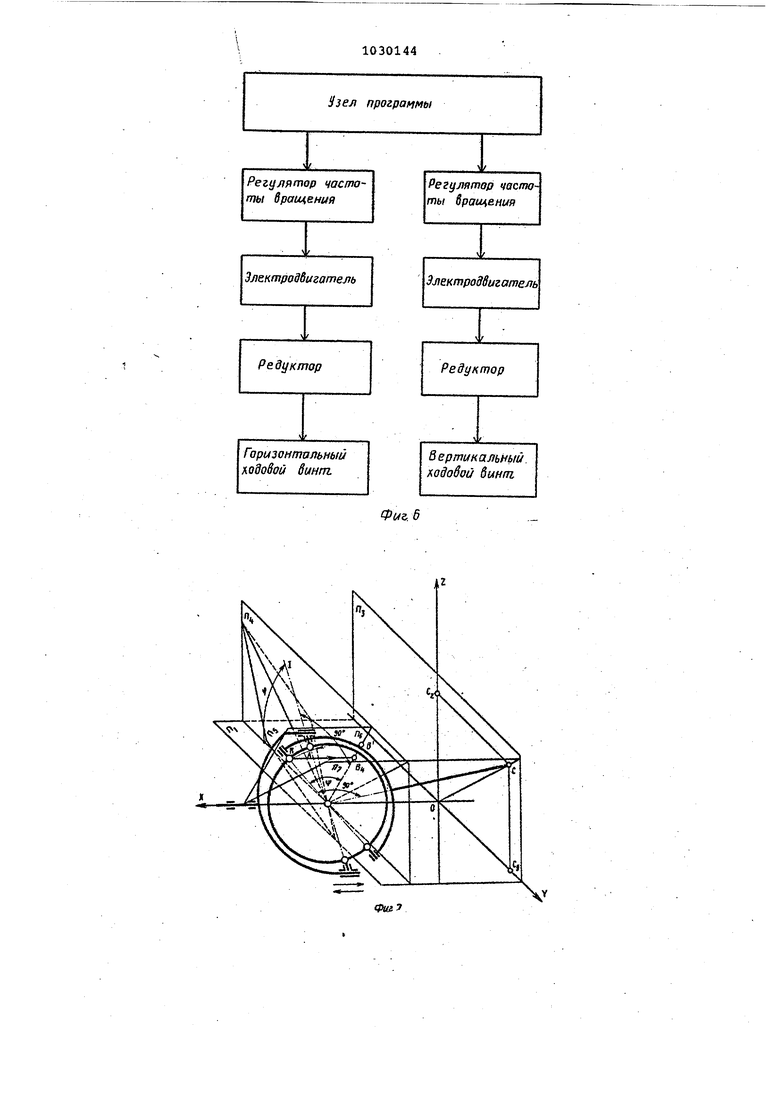
На фиг. 1 изображена предлагаемая установка; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на ,фиг. 3; на фиг. 5 - рамка, поперечное сечение; на фиг. б - схема управления пространственным движением
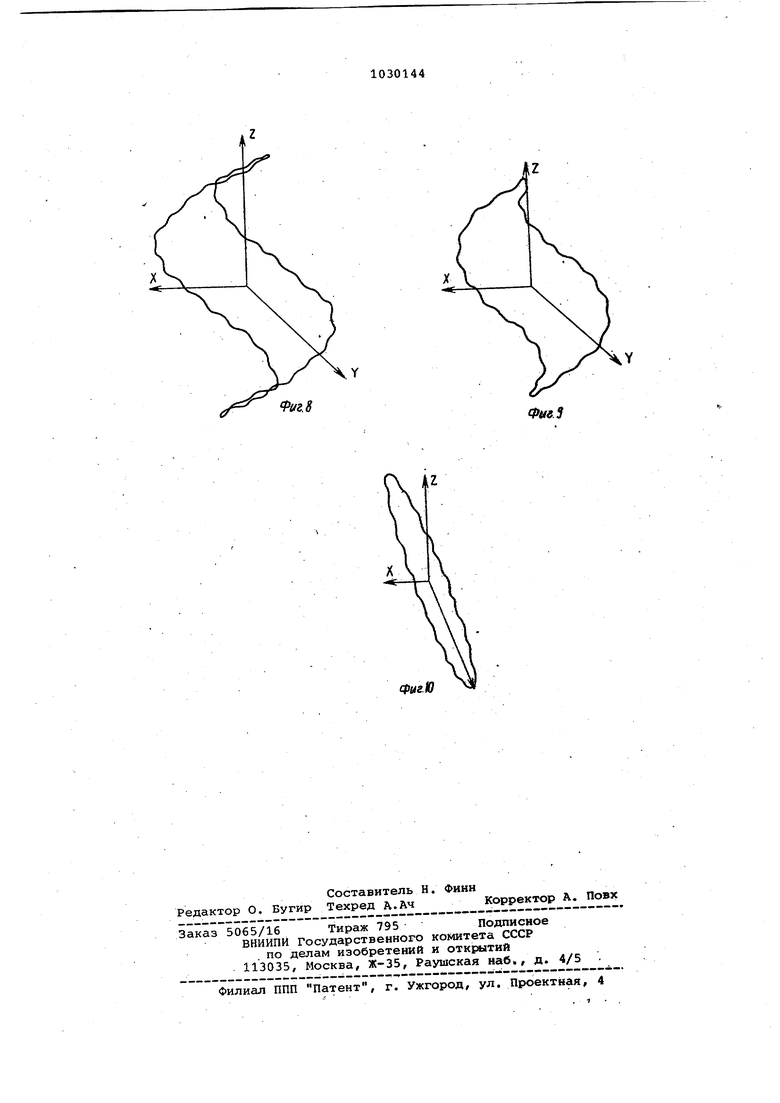
контейнера;на фиг. 7 - математичеекая модель управления пространственным движением контейнера; на фиг. 8 - траектория движения точки В контейнера при перемещении точки С по окружности; на фиг. 9 - траектот
рия движения тЬчки В контейнера при перемещении точкиС по эллипсу; на фиг. 10 - траектория движения точки В контейнера при неизменном значении координат УС и Zc.
Вибротурбуляционная установка состоит из станины 1, на которой установлен привод, состоящий из электродвигателя 2, вариатора 3 и ременной передачи 4, опор 5 качения
главного, вала б, жестко связанного с ведущей вилкой 7, имеющей направ ляющие 8, выполненные из немагнитного материала, например нержавеющей стали. На направляющих 8 при помощи сту .пицы, являющейся одновременно и полюсами электромагнитов, жестко установлены стаканы 9 с амортизаторам 10 и фиксируемые гайками 11 катушки 12. Подвижными сердечниками катушек 12 являются установленные посредством изготовленных из антифрик ;ционного материала втулок 13 ползун |14,- выполненные заодно с пружинодер жателями. Свободный конец направляю щей 8 выполнен резьбовым, на него навинчивается резьбовая втулка 15, имеющая также и наружную резьбу, но с более крупным шагом, для соединения с пружинодержателем 16. Торцы ползуна 14 и резьбовой втулки 15 опираются на сошлифованны витки пружины 17 сжатия, охватываемой снаружи пружиной 18 растяжения большего диаметра. Крайние витки пружины 18 закреплены на пружинодер жателе ползуна 14 и пружинодержател 16, соединенном при помощи резьбы с резьбовой втулкой 15. В расточках ползунов 14 смонтиро ваны каретки 19 со свободно установ ленными на осях роликами 20, имеющими желобчатую рабочую периферийную поверхность. Каретки 19 с роликами 20 удерживают посредством двух взаимно перпендикулярных колец 21 контейнер 22. Одна из пар кареток 19 жестко связана с водилом 23, имеющим жестко связанную с ним ось 24. Ось 24 входит по посадке с зазором в крестовину 25 (фиг. З) , опирающуюся через направляющие втул ки 26 на пружины 27 сжатия (фиг. 4) установленные в полой коробчатого сечения составной рамке 28 (фиг. 5) Рамка 28 имеет вертикальные цапфы 29, свободно входящие в отверстия рамки 30, которая, в свою очередь, посредством горизонтальных цапф 31 свободно .соединена с гайкой 32 вертикального ходового винта 33 и втулкой 34, входящей в соединение с зазором с колонкой 35. Винт 33 и колонка 35 связаны меж ду собой траверсой 36 и кронштейном 37. Траверса 36 выполнена заодно с гайкой 38 горизонтального ходового винта 39 ,а кронштейн 37 жестко связан с втулкой 40, посаженной с зазором на горизонтальную направляющую 41. Горизонтальный и вертикальный ходов винты 33 и 39 получают движение от двигателей 42 постоянного тока через редукторы 43. Установка имеет щит 44 управления, токосъемные коль ца -45 и щетки 46 для питания катушек 12. Для фиксации положения резь бовой втулки 15 и пружинодержателя предусмотрены контргайка 47, болт 48 о шайбой 49. Узел варьирования положения оси 24 в пространстве смонтирован в задней стойке 50. До включения установки необходимо подготовить к работе узел колебательного движения, для чего/навинчивая резьбовую втулку 15 на резь6.0ВОЙ конец направляющей 8, сжимают пружину 17 и растягивают пружину 18 до усилия, равного усилию, которое необходимо для перемещения загруженного контейнера 22 вдоль направляющих 8. При навинчивании резьбовой втулки 15 сжимается пружина 17, при з-том пружинодержатель 16 перемещается по наружной резьбе ( с более крупным шагом, чем шаг внутренней резьбы) резьбовой втулки 15 в противополож,ную сторону и растягивает пружину 18. Усилия растяжения и сжатия пружин. 17 и 18 уравновешивают друг друга. Резьбовую втулку 15 вращают до тех пор, пока величина усилий пружин 17 и 18 не становится равной усилию, необходимому для перемещения загруженного контейнера 22 вдоль направляющей 8. Положение резьбовой втулки 15 и пружинодержателя 16 фиксируется при помощи контргайки 47, болта 48 с шайбой 49. По окончании этой операции для приведения в колебательное движение контейнера 22 достаточно приложить к ползуну-сердечнику 14 небольшую по величине периодически изменяющуюся возмущающую силу. Эта возмущающая сила задается электромагнитным полем катушек 12, питаемых импульсным током. Установка работает следующим образом. От главного привода получает вращательное движение контейнер 22. От щита 44 управления через щетки 46 и токосъемные кольца 45, жестко связанные с главным валом 6, импульс- ный ток подается на катушки 12, магнитное поле которых втягивает ползун-сердечник 14. Пружины 18 после прекращения действия электромагнитной силы возвращают ползун в исходное положение, т.е. контейнер посредством ползунов 14 кареток 19 и роликов 20 получает колебательное движение в горизонтальном направлении. Таким образом, контейнер получает одновременно как. вращательные, так и колебательные движения. Для интенсификации процесса и повышения качества обработки предусмотрен механизм управления пространственным движением контейнера 22, состоящий из водила 23 с осью 24, свободно входящей в отверстие крестовины 25 рамки 28, которая совместно с рамкой 30 может поворачиваться относительно двух взаимно перпендикулярных осей горизонтального 39 и вертикального 33 ходовых винтов с приводами 42 и 43, служащими для изменения положения оси 24 в пространстве. Сущность способа управления состоит в том, что, изменяя по заданной программе путем использования ходовых винтов 33 и 3.9 положение оси 24, обеспечиваются различные виды сложного движения контейнера 22, описываемые следующими уравнениями у -о Z:eCO5(U)i)-Vc e-in (Wt) 6 -гг:-гг--. . . .„ i(2cCoe(ijyi)-5cSiM(a.t)AxS, -X 0-1 Sin (Oit 1f(7cCOs(()-)cSi (и;Ь)ЧХ „ y-orCO$(a;t) 7 rR I iZcC05Coyfc) ))-i-y где R - радиус контейнера; X f(t) -уравнение колебательного движения контейнера c Zтеин ин чт и чи ра 4) зависимость изменения положения оси 24 по крор динатё У, задаваемая программойпри помощи горизонтального ходового винта 39; f, (t) - зависимость изменения положения оси 24 по координате Z, задаваемая программой при помощи вертикального ходового винта 33;се) - угловая скорость главного t - время. Под воздействием сложного вращаьного и колебательных движений гредиенты загрузки подвергаются енсивным взаимным перемещениям, способствует производительной ачественной обработке. .Использование изобретения обеспевает интенсификацию процесса оботки.
Из ел программы
Регулятор частоты вращений
Злектроддигатель
Редуктор
Гаризонтал ныи xodoSou винт
Регулятор частоты вращения
)Jteкmpoд8uгameль
Редуктор
Вертикальньш кодовой бинт
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3259384/08, 29:12.81. | |||
