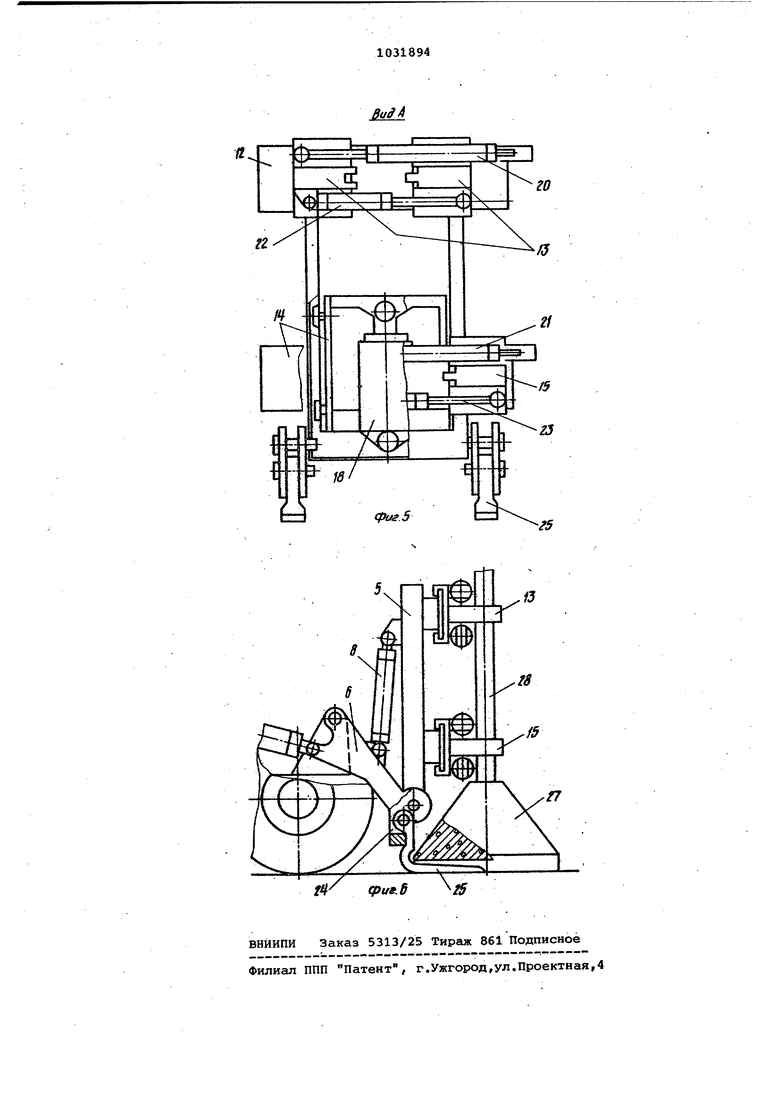
Изобретение относится к подъемно транспортному машинострбению, в час ности к самоходным устройствам для монтажа и переноса опор линий электропередач. Известно самоходное устройство для монтажа и переноса опор линий электропередач, содержащее смонтиро ванную на самоходном шасси поворотную раму с приводом ее поворота, связанную с ней траверсу с захватом и стопорное приспособление, для этой поворотной рамы fl . Однако в известном самоходном устройстве отсутствие бокового пере мещения захвата требует дополнитель ного маневра для центровки опоры при монтаже или захвате опоры. Цель изобретения - повышение про изводительности устройства путем со кращения времени монтажа опор. Пост,авленная цель достигается тем, что в самоходном устройстве дл монтажа и переноса опор Линий элект передач, содержащем смонтированную на самоходном шасси поворотную раму сприводом ее поворота, связанную С ней траверсу с захватом и стопорное приспособление, для этой поворотной, рамы, последняя снабжена дополнительной траверсой с захватом и выполнена из двух секций, соединенных между собой с помощью шарниров и гидроцилиндров, при этом нижняя секция выполнена с упорами для опор, а на верхней секции установлены все указанные траверсы с захва тами, одна из которых выполнена с возможностью перемещения вдоль секции, а все указанные захваты выполнены с возможностью независимого .поперечного перемещения. Кроме того, стопорное приспособл ние выполнено в виде пневмозахватов а верхняя секция оснащена для них выступами. На упорах нижней секции установлены съемные вилы-подхваты. На фиг. 1 изображено предлагаемое устройство в транспортном положений с опорой; на фиг. 2 - то же, в положе нии установки на площадку; на фиг. 3 - то же, в положении установки в стакан подножника; на фиг. 4 - то же, в положении опускания onojxj, вынутой из стакана поднож ника на землю; на фиг. 5 - вид А на фиг. 2; на фиг. б - вариант подъема опоры с использованием вил подхвата Устройство содержит шасси 1, на котором впереди смонтирован отвальный нож 2, а сзадина раме шасси при помощи стоек с шарнирными узлами 3 поворотная рама 4, которая состоит из верхней 5 и нижней 6 секций. Эти секции соединены между собой шарнирами 7 и гидроцилиндрами 8. Поворот рамы 4 осуществляе.тся гидроцилиндром 9, один конец которого закреплен при помощи шарнира 10на раме шасси, а другой шарниром 11соединен с поворотной рамой 4. На верхней секции 5 поворотной рамы 4на неподвижной траверсе 12 размещен челюстной захват 13, подвижная траверса 14 с челюстным захватом 15, выступы 16 для пневматических захватов 17 и гидроципиндр 18 для перемещения подъемной траверсы 14. Пневмозахваты 17 (фиг. 2) для фиксации поворотной рамы 4 в транспортном положении размещены на подставке 19, закрепленной на раме шасси.. Пневмозахваты связаны с пневмосистемой шасси гибким шлангом, а кран управления ими размещен в Кабине водителя. Челюстной захват 13 перемещается вдоль траверсы 12 гидроцилиндрами 20 Лфиг. 3 ,. а челюстной захват 15 вдоль траверсы 14 гидроцилиндрами 21. Зажим захватов осуществляется гидроцилиндрами 22 и 23. ; На нижней секции 6 поворотной рама 4 имеются упоры 24, на которых проделаны отверстия для пальцев вил подхватов 25.Стакан 26 смонтирован на подножнике 27 и служит для установки опоры 28. Устройство работает следующим образом. Монтаж ( демонтаж)опор линии электропередач СЛЭП ). . Для монтажа опоры 28, когда она лежит на земле, самоходное шасси 1 .подгоняется рабочим органом к основанию опоры 28, выступы 16 освобождаются от пневматических захватов 17, поворотная рама 4 опускается гидроцидиндром 9, далее гидроцилиндром 8 секция 5 поворотной рамы 4 на1А1оняется в сторону опоры 28 до ; плоскости параллельной оси опоры. Затем гидроцилиндрами 22 и 23 раскрываются челюстные захваты 13 и 15, центрируются по оси опоры 28. и с помощью гидро цилиндров 22 и 23 зажимается опора 28. После этого секция 5вместе с опорой 28 гидроцилиндрами 8 подымается до вертикального положения и опора 28 переносится к подножнику 27, где 0на подводится к верхнему обрезу стакана 26 подножника 27, ослабляется захват 13 так, чтобы опора могла.; перемещаться внутри его, и перемещением траверсы 14 с захватом 15 при помощи гидроцилиндра 18 опора 28 опускается в стакан 26 подножника 27. Демонтаж опоры осуществляют в обратном порядке. :Пёренос опоры в собранном виде. Самоходное шасси рабочим органом подгоняется к опоре ЛЭП, рама 4 гид-, роцилиндрсм 9 переводится в вертикальное положение, захваты 13 и 15 секции 3 раскрываются и центрируются относительно оси опоры, шасси подъезжает к опоре вплотную, захватом 15 зажимает стакан 26, аверхним захватом 13 - опОру 28.
Затем с помощью гидроцилиндра 9 рама 4 вместе с опорой 28 переводитс в горизонтальное;положение и фиксируется пневматическими захватами 17 за 16, после чего опора транспортируется к месту назначения.
В новом месте установки onojaa отвалом 2 выравнивается плсядадка. Описанньм порядком рама 4 с опорой переводится в вертикальное положение захваты 13 и 15 разжимаются, шасси 1 отъезжает от опоры, рама 4 переводится в горизонтальное положение , -
Перенос опоры в разобранном виде.
Шасси 1 подгоняется к опоре. Рама 4 переводится в вертикальное положение и т.д. Разница в том, что захват, .15 захватывает не стакан поднсжника 26, а опору 28, а захват 13, захватив опору 28, не зажимает его. После этого, гидроцилКНДР 18 перемещает траверсу 14 с захватом 15 и опорой 28 вверх до выхода опоры 28 из стакана 26 подножника 27. Шасси 1 отъезжает от подножника 27 и гидроиллиндр 18 опускает траверсу
14с захватом 15 до тех пор, пока низ опоры 28 не окажется у земли. Л Затем захват 13 тоже зажимает опору 28.Перевод рамы 4 в горизонтальное положение и фиксацию ее проводят аналогично п. 2. Если транспортировке додлёжит длиийая опора, то она перепускается гёэ захватам 13 и
15в сторону захвата 15. Выполняется это-следукицим обра-зом. . . : - -.
Захват 15 ослабляется, гидроцилиндром 18 траверса 14 с захватом
15 перемещается в сторону вершины . опоры 28 по раме 4. В верхнем поло жении траверсы 14 захват 15 зажимает опору 28, а захват 13 ослабляет зажим. Затем гидроцилиндр 18 возвращает траверсу 14 с захватом 15 вместе с опорой .28 в, прежнее положение, после чего захв,ат 13 зажимает опору 28, Этот цикл 1 повторяется несколько раз в зависимости от величины перепуска опбрл 28. Опора
0 транспортируется в заданное место, Где она перепускается по захватам 13 и 15 обратно и поворотом ракы 4 опора опускается на землю {, в штабель ) или ставится в стакан 26 нод5ножника 27.
Пе,ренос опоры путем подхвата подножника вилами подхвата 25. .
На упоры 24 рамы 4 навешиваются , вилы подхвата 25. Подъезд к опоре
0 28 и поворот рамы 4 осуществляют по п. 2, Затем напором шасси 1 вилы подхвата 25 заводятся под основание подножника 27, захваты 13 и 15 захватывают опору 28, рама 4 несколько
5 наклоняется в сторону шасси 1. В таком положении опора 28 перемещается. Если опора при перемещений требует, сохранения вертикального положения, тогда., гидроцилинд рами 8 ее довора0чивают вместе с секцией 5 рамы 4 до вертикального положен-ия.
Если опору требуется транспортировать в горизонтальном положении, тогда раму 4 с захваченной опорой
5 переводят в горизонтальное положение и транспортируется так, что подножник 27 кроме опирания в упоры 24 придерживается вилами подхвата 25,
Применение изобретения позволит
0 повысить производительность труда при строительстве ЛЭП, уменьшить количество техники по сравнению с известной технологией строительства ЛЭП.
У5
(pus. 4
/J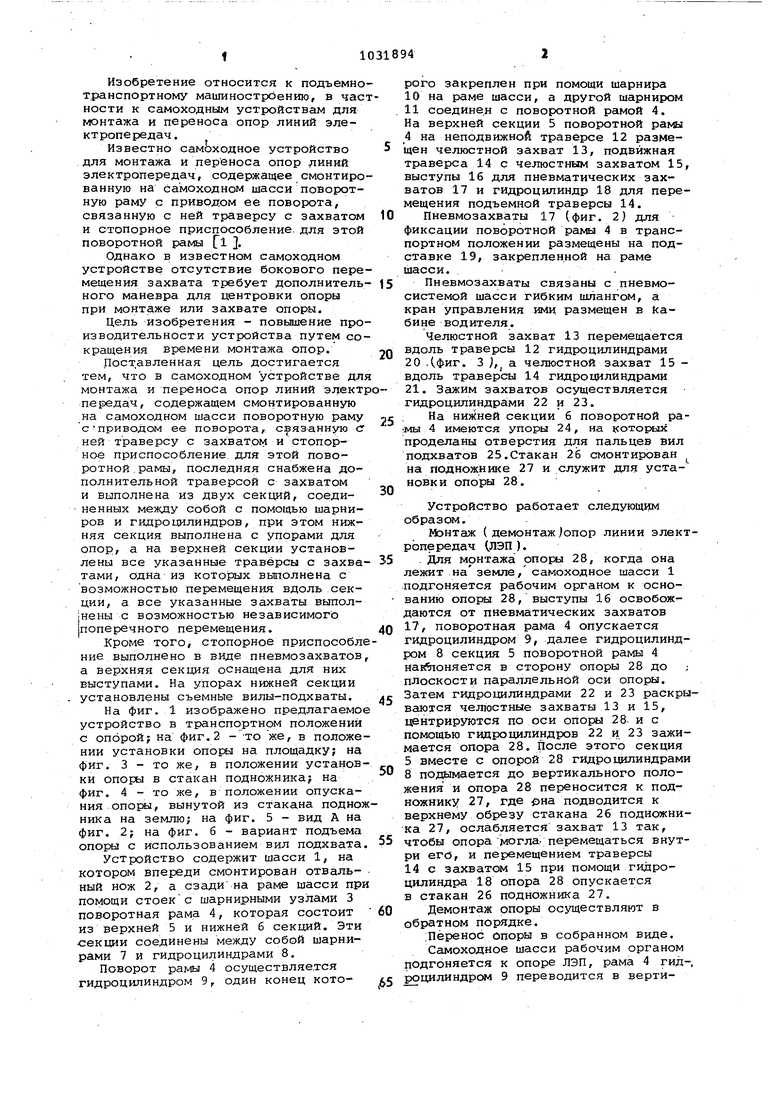

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса опор линий электропередач | 1990 |
|
SU1756185A1 |
| Самоходное устройство для переноски опор линий электропередач | 1977 |
|
SU639808A1 |
| Устройство для монтажа опор линий электропередачи | 1981 |
|
SU1000387A1 |
| Устройство для транспортировки и монтажа длинномерных грузов | 1987 |
|
SU1461659A1 |
| Грузоподъемное устройство | 1985 |
|
SU1370060A1 |
| Передвижное подъемное устройство для монтажа длинномерных секционных конструкций | 1981 |
|
SU989016A1 |
| Транспортное средство для перевозки длинномерных грузов | 1986 |
|
SU1311965A1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| КОРЧЕВАТЕЛЬ | 1972 |
|
SU419204A1 |
| Машина для заготовки пневой древесины | 1979 |
|
SU869682A1 |

1. САМОХОДНОЕ УСТРОЙСТВО ДЛЯ даНТАЖА и ПЕРЕНОСА ОПОР ЛИНИЙ ЭДЕКТРОПБРЕДАЧ, содержащее смонтированную на самоходном шасси поворотную раму с приводом ее поворота, связанную с ней траверсу с захватом и стопорное приспособление для этой поворотной рамы, отличающееся тем, что, с целью повышения производительности устройства путем сокращения времени монтажа и перемещения опор, поворотная рама снабже(Pc/f.f на дополнительной траверсой с захватом и выполнена из двух секций, соединенных между собой с помощью шарниров и гидроцилиндров, при этом нижняя секция выполнена с упорами для опор, а на верхней секции установлены все упомянутые траверсы с захватами, одна из которых выполнена с возможностью перемещения вдоль секоди, а все указанные захваты выполнены с возможностью независимого поперечного перемещения. 2.Устройство по п. 1, о т л и т ч а ю щ е. е с я тем, что стопорное приспособление выполнено, в виде пневмозахватов, а верхняя секция оснащена для них выступами.§ 3.Устройство по п. 1, отли(Л чающееся тем, что на упорах нижней секции установлены съемные вилы-подхваты. 7 СО оо со |i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самоходное устройство для переноски опор линий электропередач | 1977 |
|
SU639808A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
