/
S
Изобретение относится к подъемно- транспортному машиностроению, а именно к устройствам для захвата длинномерных грузов, и может быть использовано на погрузочно-разгрузочных работах в различных областях народного хозяйства.
Цель изобретения - расширение ... функциональных возможностей путем изменения зоны захвата объекта в вертикальной и горизонтальной плоскостях.
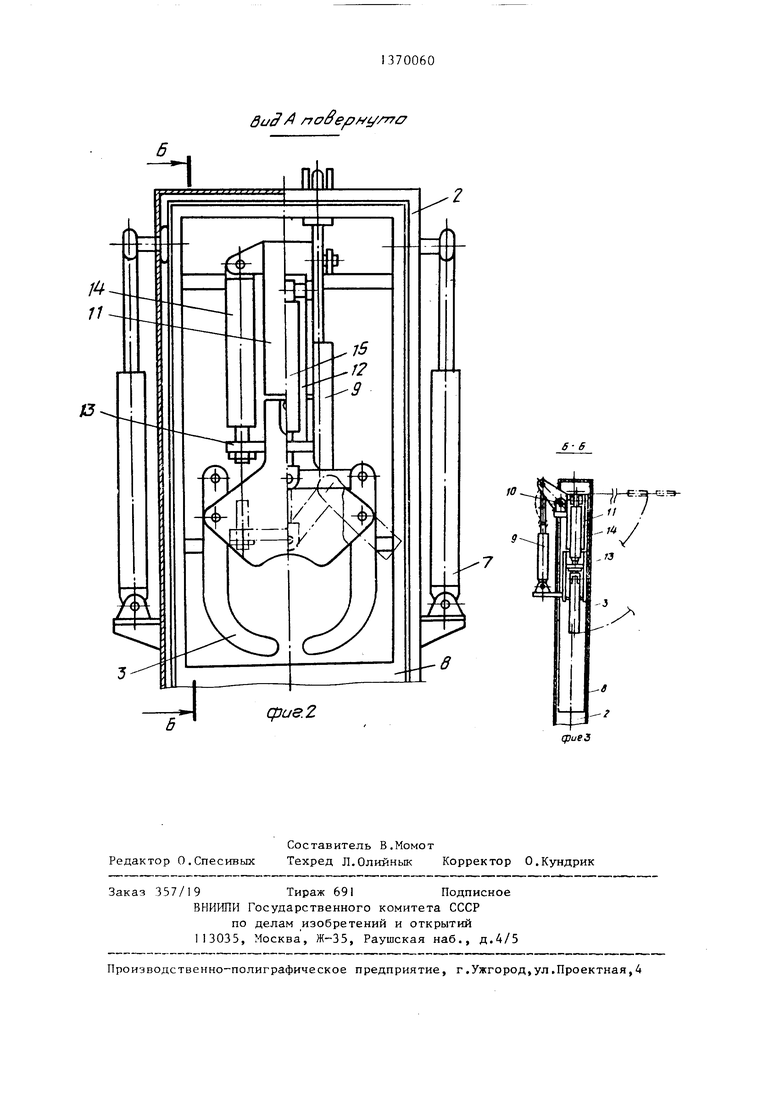
На фиг.1 показан общий вид устройства, вид сбоку; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - разре Б-Б на фиг.2.
Грузоподъемное устройство смонтировано на самоходном шасси 1 и имеет раму 2, клещевой за}сват 3 и подвижную по раме 2 приводом 4 каретку 5 с вилочным захватом 6. Верхняя часть рамы 2 снабжена дополнительной подвижной относительно нее приводом 7 кареткой 8, на которой установлена с возможностью поворота в вертикальной плоскости приводом 9 относительно шарнира 10 дополнительная телескопическая рама 11. Вьщвижная часть 12 последней посредством траверсы 13 связана с приводом ее выдвижения-14. Управление клещевым захватом 3 производится приводом 15.
Работа устройства осуществляется следующим образом.
При производстве работ по перемещению длинномерных грузов, например опор ЛЭП, необходимо установить грузоподъемное устройство из транспортного в рабочее положение, затем приводом 4 каретка 5 с вилами 6 подводится к опоре ЛЭП, самоходным шасси 1 вилы 6 заводятся под нее, поднимают каретку 5 с вилами 6 и открьшают опору от земли. Приводом 7 дополнительная каретка 8 с захватом 3 перемещается вдоль рамы 2 и подводится к месту захвата опоры ЛЭП. Привод 9 поворачивает дополнительную раму I1 с
захватом 3, а привод 14 выдвигает его до прижатия к опоре ЛЭП, затем приводом 15 обеспечивается обхват опоры ЛЭП захватом 3. Установив раму
2грузоподъемного устройства в транспортное положение, опору ЛЭП транспортируют к месту монтажа.
Операции по установке опоры ЛЭП производятся в обратном порядке.
При использовании грузоподъемного устройства на погрузочно-разгруэочных работах в качестве манипулятора вилы 6 каретки 5 демонтируют. Приводом 7 дополнительная каретка 8 с захватом
3перемещается вдоль рамы 2. Захват 3 приводом 9 поворачивается на требуемый угол относительно рамы 2, затем приводом 14 выдвигается и подводится к грузу, а приводом 15 зажимает груз. Приводом 7 каретка 8 с захватом 3 и грузом поднимается, а самоходное щасси 1 перемещается к месту разгрузки. Операция разгрузки осуществляется в обратной последовательности.
Формула изобретения
Грузоподъемное устройство, содержащее самоходное щасси, смонтированную на нем с возможностью поворота приводом в вертикальной плоскости раму, установленные на последней с возможностью продольного перемещения
приводом клещевой захват и каретку с вилочным захватом, отличающееся тем, что, с целью расширения функциональных возможностей путем изменения зоны захвата объекта в вертикальной и горизонтальной плоскостях, оно снабжено смонтированной на раме с возможностью продольного перемещения приводом дополнительной кареткой и установленной на ней с возможностью
поворота приводом в вертикальной плоскости дополнительной телескопической рамой, связанной с приводом ее вьщвижения, а клещевой захват установлен на выдвижной части последней.
За / 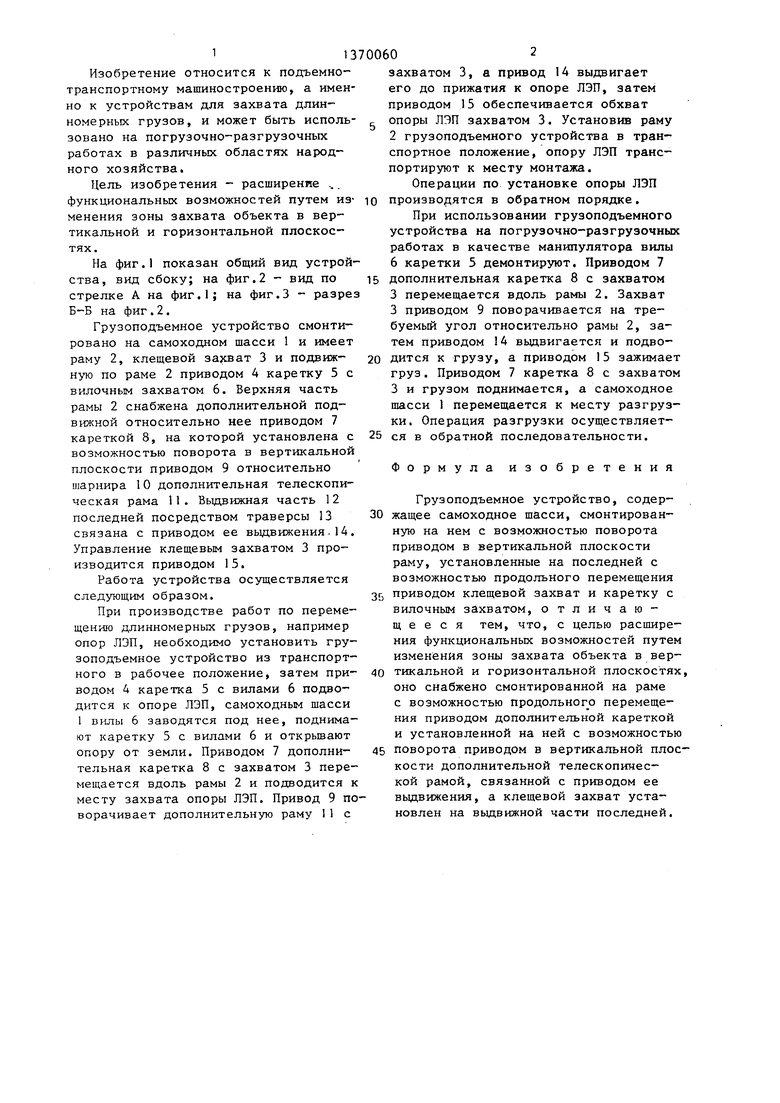
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2141446C1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| ПОГРУЗОЧНО-ТРАНСПОРТНАЯ МАШИНА ДЛЯ СОРТИМЕНТОВ | 1991 |
|
RU2026211C1 |
| МАШИНА ДЛЯ ПОГРУЗКИ, ПЕРЕВОЗКИ И РАЗГРУЗКИ ДЛИННОМЕРНЫХ ГРУЗОВ | 1965 |
|
SU175828A1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1987 |
|
SU1444192A1 |
| Погрузчик | 1986 |
|
SU1493608A1 |
| ПОГРУЗЧИК ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ВАГОНОВ | 1993 |
|
RU2092429C1 |
| Автопогрузчик | 1980 |
|
SU887455A1 |
| Транспортное средство для перевозки контейнеров | 1979 |
|
SU789295A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для захвата длинномерн1 1х грузов, и может быть использовано на погрузочно-разгрузоч- ных работах. Цель изобретения - расширение функциональных возможностей путем изменения зоны захвата объекта в вертикальной и горизонтальной плоскостях. Грузоподъемное устройство смонтировано на самоходном шасси 1 и имеет раму 2, клиновой захват 3 и подвижную по раме 2 приводом 4 каретку 5 с вилочным захватом 6. Верхняя часть рамы 2 снабжена дополнительной подвижной относительно нее приводом 7 кареткой, на которой установлена с возможностью поворота в вертикальной плоскости приводом 9 дополнительная телескопическая рама. Выдвижная часть последней снабжена приводом. 3 ил. с (Л
| Устройство для переноски опор передвижной контактной сети | 1973 |
|
SU515708A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
