СА: ю
Сл
ел
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| Бесконтактный линейный вращающийся трансформатор | 1976 |
|
SU658671A1 |
| Датчик угла | 1985 |
|
SU1417127A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Индукционный бесконтактный датчик угла | 1976 |
|
SU587318A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1774439A1 |
| Индукционный датчик углового ускорения | 1974 |
|
SU586389A1 |
| СПОСОБ ВЗАИМНОЙ УСТАНОВКИ СИНХРОННОГО ДВИГАТЕЛЯ И СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1994 |
|
RU2079964C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |

СПОСОБ ОПРЕДЕЛЕНИЯ НУЛЕВОГО ПОЛОЖЕНИЯ ИНДУКЦИОННОГО ДАТЧИКА УГЛА при стыковке с исполнительным механизмом, включающий подачу напряясения на обмотку возбуждошя, измерение напряжения на измерительной обмотке, поворот корпуса датчика до получения минимальной величзшы измеряемого напряйсения, о т л и ч а ю щ и и с я тем, что, с целью упрощения процесса юстироыси, взаимное расположение ротора к статора индукционного датчика угла, соответствующее минимальной велич1Ше напряжения вьрсодной обмотки осуществляют после сочленения выходных валов индукционного датчика угла и исполнительного механизма путем поворота корпуса до совмещения меток, нанесенных на торец невыходного конца вала и корпус индукционного датчика угла. (Л с /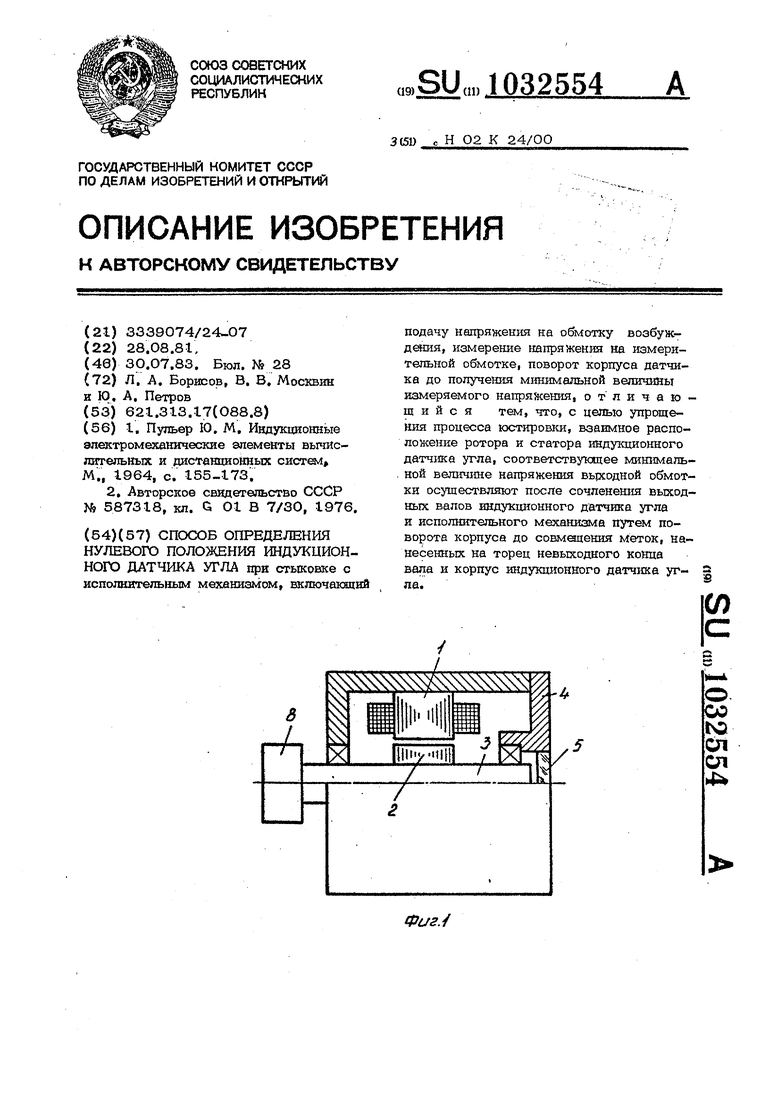
Фаг.-/ Иэобретешю относится к индукционны датчикам угла. Известны индукционные датчики с явн вьфахсенмыми полюсами на роторе и обмотками на статоре L1 J. Недостатком данных индукционных датчиков угла является отсутствие индикации нулевого поло5кения ротора относительно статора. Наиболее близким по технической сущ ; ности к предлагаемому является индукционный бесконтактный датчик угла, содержащий статор с обмотками и безобмоточный ротор С 2. Недостатком известного датчика является отсутствие фиксации нулевого положения датчика угла и исполнительного механизма при их сочленении за один уст нов. Целью изобретения является упрощение процесса К)ст1фовки. Указа1Шая цель достигается тем, что определение нулевого полонсения индукционного датчика угла при стыковке с исполнительньм механизмом, путем подачи напряжения на обмотку возбуждения, измерения напряжения на измерительной обмотке, поворота корпуса датчика до получения минимальной величюты измеряемого напряжения, выполняется взаимным расположением статора и ротора индукционного датчика угла, соответствующее ми нимальной величине напряжешга выходной обмотки, после сочленения выходных вало индукционного датчика угла и исполнительного механизма пут&л noaopoia корпуса до совмещения меток, нанесенных на торец невыходного коЕца и корпус дат чика. На фиг. 1 показан швдукционный датчик, продольный разрез; на фиг, 2 - вид со стороны невыходного конпа вала; на
Фи2.2 фиг. 3 - вид со .стороны входного вала. Индукционный бесконтактный датчик угла содержит пакет статора I с обмотками, ротор 2, вал 3, подшипниковую крышку 4 с отверстием по оси вала, в котором герг етично размещен прозрачный материал 5, на торцах вала и фланца радиальные риски 6 и 7, выходной конед вала со стыковочным элементом 8, ориентирующий ; паЗ} который совпадает по угловому положенто с риской 7, Способ определения нулевого положения индукционного датчика угла при стыковке с исполнительным механизмом заключается в следующем, - Взаимное расположение ротора и статора индукционного датчика угла, соотвествукядее минимальной величине напряжения на выходной обмотке статора, осуществляют после сочленения выходных валов даттщка и исполнительного механизма путад совмещения меток, нанесенHbjx на торец невьйсодного вала датчика и торец его корпуса, причем за положением метки, расположенной на невыходном конце вала датчика наблюдают через смотровое стокло, установленное герметично во фланце индукционного датчика угла, напротив невыходного конца валае При повороте ротора в ту или другую сторону от нулевого положения, на выходной обмотке появляется сигнал, пропорщшнальный углу поворота ротора, В настоящее время процесс юстировки производится методом послещовательных приближений,многократно перезакреп-/ ляя валы. Предлагаемый способ юстировки сводштся к однократному сочленению лов датчика и исполнительного; механизма, что значительно сокращает время, затрачиваемое на сборку изделий.
| I | |||
| Пупьер Ю | |||
| М, Индукционные эпектромезшшгческие элементы вычислотепьных и дистанционных систем М., 1964, с | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Индукционный бесконтактный датчик угла | 1976 |
|
SU587318A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
