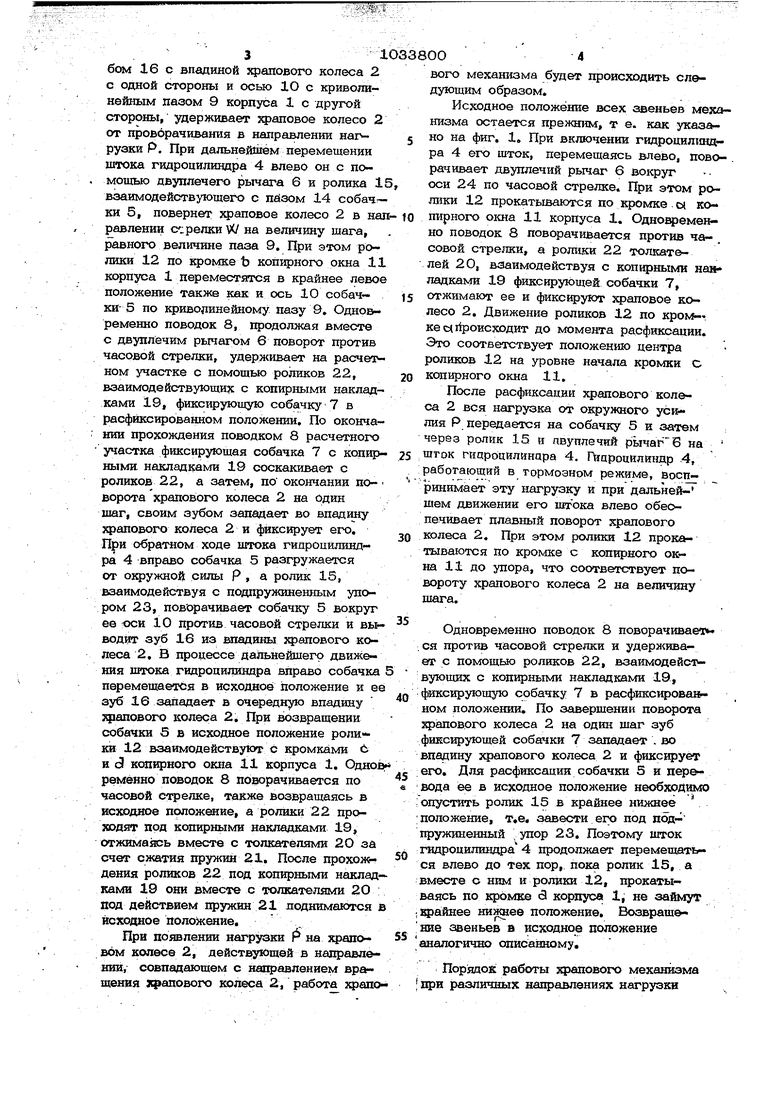
Изобретение относится к механизмам прерывистого движения и может быть использовано в любой отрасли машиностроения. Известен зфаловой механизм содержащий корпус, храповое колесо, рабочую собачку, фиксирующую собачку с копирными накладками, поводок с толкателями на одном .конце, взаимодействующими с копирными накладками, и привод . Недостатком известного механизма является неработоспособность при знакоf переменной нагрузке, вызывающей самопроизвольный поворот храпового колеса при совпадении направления нагрузки с направлением вращения колеса и расфиксации храпового колеса фиксирующей собачкой. Цель изобретения - повышение надеж ности работы механизма при изменении направления нагрузки. . Указанная цель достигается тем, что храповой механизм, содержащий корпус,, колесо, собачку, фиксирующую собачку с копирными накладками, поводок с толкателями на одном конце, взаимодействующими с копирными наклад ками, и привод, снабжен установленным на другом конце поводка двуплечим ры- чагом, один конец которого взаимодейст вует с приводом, размещенной на друго конце двуплечего рычага осью с тремя последовательно расположенными роликами, подпружиненным к среднему ролику и взаимодействующим с ним упором, размещенным на собачке, в последней вьшолнен паз, в котором расположен средний ролик, а в корпусе - криволиней ный паз, в котором на оси установлена собачка, и окно, с которым взаимодейст вуют крайние ролики. На фиг. 1 изображен храповой мехагнизм, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1;. на фиг. 4 - разрез В-В на фиг.1; на фиг. 5 - ввд Г на фиг.2. , Храповой механизм содержит корпус аповое колесо 2, жестко установленно на валу 3, гидроцилиндр 4, являющийс приводом храпового механизма, собачку 5 и двуплечий ьгчаг б, являющиеся следующими Элементами между гвдрои линдром 4 и храповым колесом 2, фиксирующую собачку 7, удерживающую храповое колесо 2 при расфиксированной собачке 5, поводок 8, свободно установленный на валу 3 и осуществляющий кинематическую связь между гидрод линдром 4 и фиксирующей собачкой 7 В корпусе 1 вьшолнен криволинейный паз 9, в котором размещается ось 10 собачки 5 и окно 11, в котором пере-, мещаются ролики 12 , установленные на оси 13 двуплечего рычага 6. В собач -ке 5 выполнен паз 14, в котором перемещается ролик 15, установленный на оси 13 двуплечего рычага в, и зуб 16, взаимодействующий с впадиной храпового колеса 2. Фиксирующая собачка 7 подпружинена пружиной 17 и содеркит зуб 18, взаимодействующий с впадиной храпового колеса 2, и копирные накладки 19. На свободном конце поводка 8 установлены толкатели 2 О, подпружиненные пружинами 21, и несущие ролики 22, которые взаимодействуя с копирнь ми накладками 19, в зависимости от направления движения поводка 8 отжимают фиксирующую собачку 7 либо отжимаю- ся сами. В передней стенке собачки 5 смонтирован подпружиненный упор 23, взаимодействующий с роликом 15. Двуплечий рьиаг 6 соединен с.поводком 8 осью 24. Храповой механизм работает следук шим образом. В исходном положении (фиг.1)обе . собачки 5 и 7 находятся в зафиксированном положении и удерживают храповое колесо 2 от проворрта под действием нагрузки Р, шток гидроцилиндра 4 выдвинут в крайнее правое положение, двуплечий рычаг 6 и поводок 8 занимают вертикальное положение. Храповому колесу 2 необходимо обеопечить постоянное направление вращения, например, по стрелке W , т.е. против часовой стрелки. В цанном случае напра&ление нагрузки противоположно направлению вращения :фапового колеса. При включении гидроцилиндра 4 его ютюк перемещается влево, поворачивая при этом двуплечий рычаг 6 вокруг оси 24 по часовой стрелке. При наличии нагруэки R на храповом колесе 2, направле - . ной по часовой стрелке, ролики 12 катятся по kpOMKe ,Л копирного окна 11, а поводок 8 поворачивается против часовой стрелки. Ролики 22 толкателе лей 20, взаимодействуя с копиряыми накладками 19 фшюирующей собачки 7, отжимают ее и расфиксируют зфшювое колесо 2, одновременно ролики 12 и и 15 перемешаются из верхней части юоп ирного окна 11 корпуса 1 и паза 14 собачки 5 в нижнкио до упора. При этом собачка 5, взаимодействуя своим зубом 16 с впадиной :фапового колеса 2 с одной стороны и осью 10 с криволинейным лазом 9 корпуса 1 с -другой стороны, удерживает храповое колесо 2 от проворачивания в направлении нагрузки Р. При дальнейшем перемещении штока гидроцилиндра 4 влево он с помощью двуплечего рычага 6 и ролика 1 взаимодействующего с пйзом 14 собач:- ки 5, повернет храповое колесо 2 в на равлении ссрелки на величину шага, равного величине паза 9. При этом ролики 12 по кромке b копирного окна 11 корпуса 1 переместяргся в крайнее левое положение также как и ось Ю собач- ки- 5 по криволинейному пазу 9, Одновременно поводок 8, продолжая вместе с двуплечим рычагом 6 поворот против часовой стрелки, удерживает на расчетном участке с помощью роликов 22, взаимодействующих с копирными накладками 19, фиксирующую собачку 7 в расфйкс1фованном положении. По окончании прохождения поводком 8 расчетного участка фиксирующая собачка 7 с копирными накладками 19 соскакивает с роликов 22, а затем, по окончании поворота храпового колеса 2 на один шаг, своим зубом западает во впад1шу зфапового колеса 2 и фиксирует его. При обратном ходе штока гидроиилиндра 4 вправо собачка 5 разгружается от окрухшой силы Р , а ролик 15, взаимодействуя с подпружиненным упором 23, поворачивает собачку 5 вокруг ее юи 10 против часовой стрелки и вь& водит зуб 16 из впадины храпового колеса 2. В процессе дальнейшего двилсения штока гндропилиндра вправо собачка перемещается в исходное положение и е зуб 16 западает в очередную впадину храпового колеса 2, При возвращении собачки 5 в исходное положение ролики 12 взаимодействуют с кромками 6 и d копирного окна 11 корпуса 1. Однов ремённо поводок 8 поворачивается по часовой стрелке, также возвращаясь в ксхоаяое положение, а ролики 22 проходят под копирными накладками 19, отжимаясь вместе с толкателями 2О за счет сжатия пружин 21. После прохождения роликов 22 под копирными наклад ками 19 они вместе с толкателями 20 под действием пружин 21 поднимаются исходное положение. При появлении нагрузки на храповом колесе 2, действующей в направлении, совпадающем с направлением вращения зфапового колеса 2, работа храпо вого механизма будет происходить следующим образом. Исходное положение всех звеньев механизма остается прежним, т е. как указано на фиг. 1 При включении гидроцилиндра 4 его щток, перемещаясь влево, поворачивает двуплечий рычаг б вокруг оси 24 по часовой стрелке. При этом ролики 12 прокатываются по кромке . ы копирного О1сна 11 корпуса 1. Одновременно поводок 8 поворачивается против часовой стрелки, а ролики 22 толкателей 20, взаимодействуя с коп ирными на ладками 19 фиксирующей собачки 7, отжимают ее и фиксируют храповое колесо 2. Движение роликов 12 по ct происходит до момента расфиксации. Это соответствует положешоо центра роликов 12 на уровне начала кромки С копирного окна 11. После расфиксации храпового колеса 2 вся нагрузка от окружного Р передается на собачку 5 и затем через ролик 15 и пвуплечий рычаг Б на шгок гицроцилинара 4. Гйцроцилиндр .4, рабогающий в тормозном режиме, Воспринимает эту нагрузку и при дальнейшем движении его штока влево обеопечивает плавный поворот храпового колеса 2, При этом ролики 12 прокатываются по кромке с копирного окна 11 до упора, что соответствует повороту храпового колеса 2 на величину шага. Одновременно поводок 8 поворачиваем ся против часовой стрелки и удерживает с помощью роликов 22, взаимодействующих с копирными накладками 19, фиксирующую собачку 7 в расфиксирова ном положении. По завершении поворота храпового колеса 2 на один шаг зуб фиксирующей собепкн 7 западает . во впадину храпового колеса 2 и фиксирует его. Для расфиксации собачки 5 и перевода ее в исходное положение необходимо опустить ролик 15 в крайнее нижнее положение, т.е. завести его под подпружиненный /упор 23. Поэтому шток гидроцилиндра 4 продолжает перемещаться влево до тех пор,, пока ролик 16, а вместе с ним и ролики 12, прокатываясь по кромке в корпуса 1, не займут Щ}айнее нижнее положение. Возвращ&ние звеньев в исходное положение аналогично описазЕШОму, Пор:ядок работы храпового механизма jjpn различных направлениях нагрузки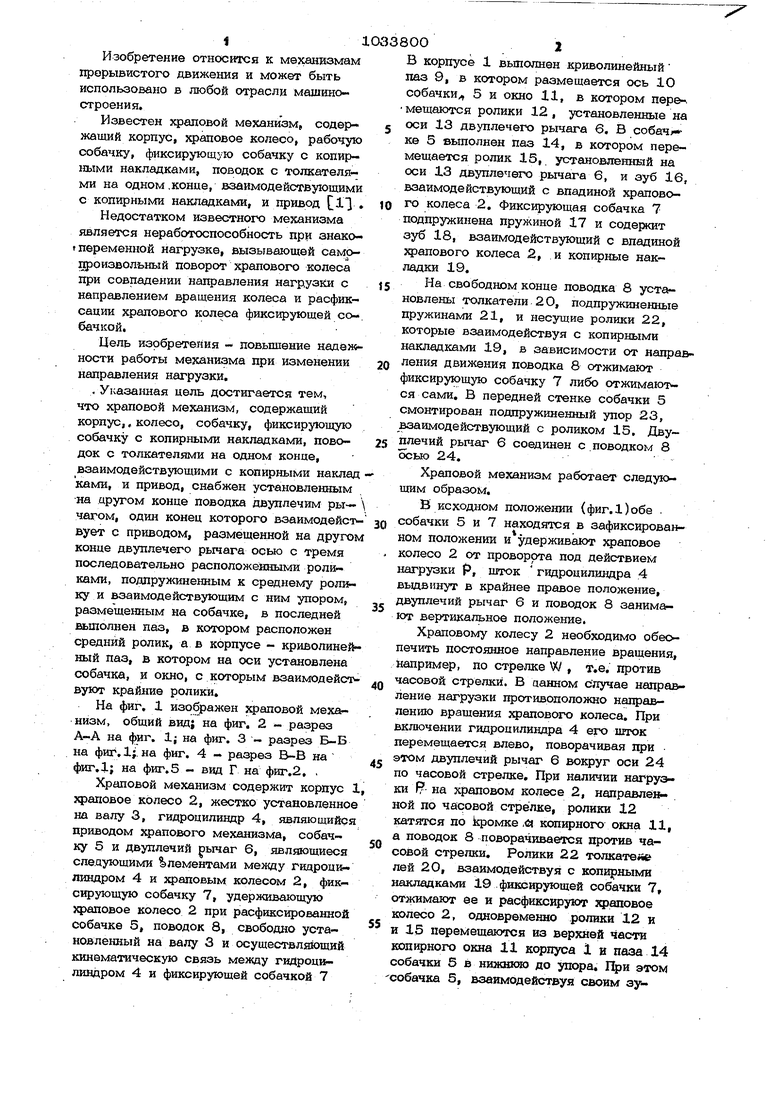
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| Делительное устройство | 1984 |
|
SU1238945A1 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
| УСТРОЙСТВО для КЛЕПКИ полых ЦИЛИНДРИЧЕСКИХ | 1973 |
|
SU393019A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Храповой механизм | 1980 |
|
SU949262A1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ И СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА | 2015 |
|
RU2617805C2 |
| Рычажно-храповой механизм | 1982 |
|
SU1027458A1 |
ХРАПОВОЙ МЕХАНИЗМ , содержащий корпус, колесо, собачку, ; фиксирующую собачку с КОП1ФНЫМИ накладками, поводок с толкателями на одном KOHue« взаимодействующими с копирными накладками, и привод, о т л и ч а и и с я тем, что, с целью повышения надежности работы при изменении направления аагруаки, механизм снабжен установленным на другом конце поводка двуплечим рычагом, один конец которого взаимодействует с приводом, размещенной на другом конце двуплечего .рычага осью с тремя последовательно расположенными роликами, подпружиненным к среднему ролику и взаимодействующим с ним упором, размещенным на собачке, в последней выполнен паз, в котором расположен средний ролик, а в корпусе- криволинейный паз, в котором на оси , установлена собачка, и OKHCV с которым взаимодействуют крайние ролики. (Л с о со с 00 о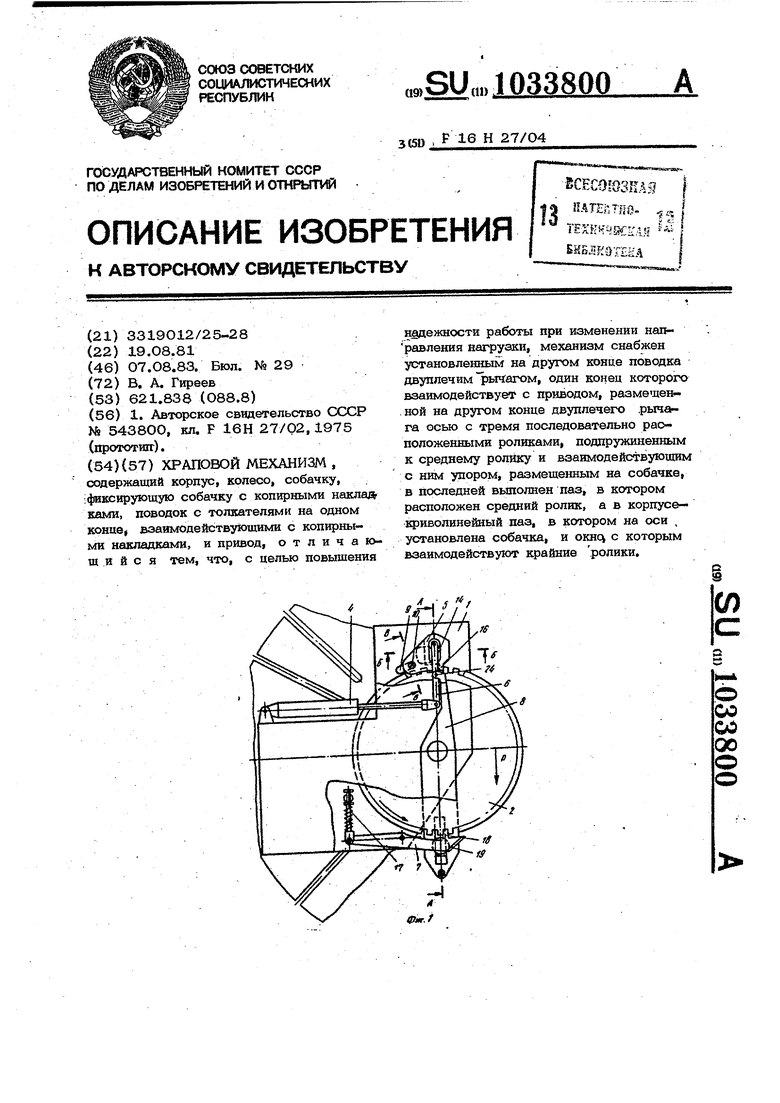
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для останова банкаброша по окончании съема | 1926 |
|
SU5438A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
