(54) ХРАПОВОЙ МЕХАНИЗМ
. 1
Изобретение относится к общему машиностроению и может быть использовано в качестве шагового подъемно-опускаюшего механизма.
Известен храповой механизм, содержаший корпус, приводной вал с храповым колесом, рабочую и фиксирующую собачки, взаимодействующие с храповым колесом, и поводок, связанный с фиксирующей собачкой пружиной 1.
Недостатком указанной конструкции яв ляется фиксация храпового колеса только в одном направлении.
Наиболее близким по технической сущности и достигаемому результату к изобретению является храповой механизм, содержащий корпус, приводной вал с жестко закрепленными на нем храповыми колесами с встречно-направленными зубьями, поводок, рабочие и фиксирующие собачки, взаимодействующие с колесами и одна из фиксирующих собачек связана с поводком.
Вторая фиксирующая собачка связана со вторым поводком мехайизма. Рабочие со- бачки размещены на шток-ах приводных устройств - гидроцилиндров 2.
Недостатком этого механизма является отсутствие в рабочем режиме фиксации приводного вала от внешнего нагрузочного момента, направленного в одну сторону с действующей собачкой.
5
Цель изобретения - обеспечение возможности поворота приводного вала в одном направлении независимо от направления воздействия на него нагрузочного момента.
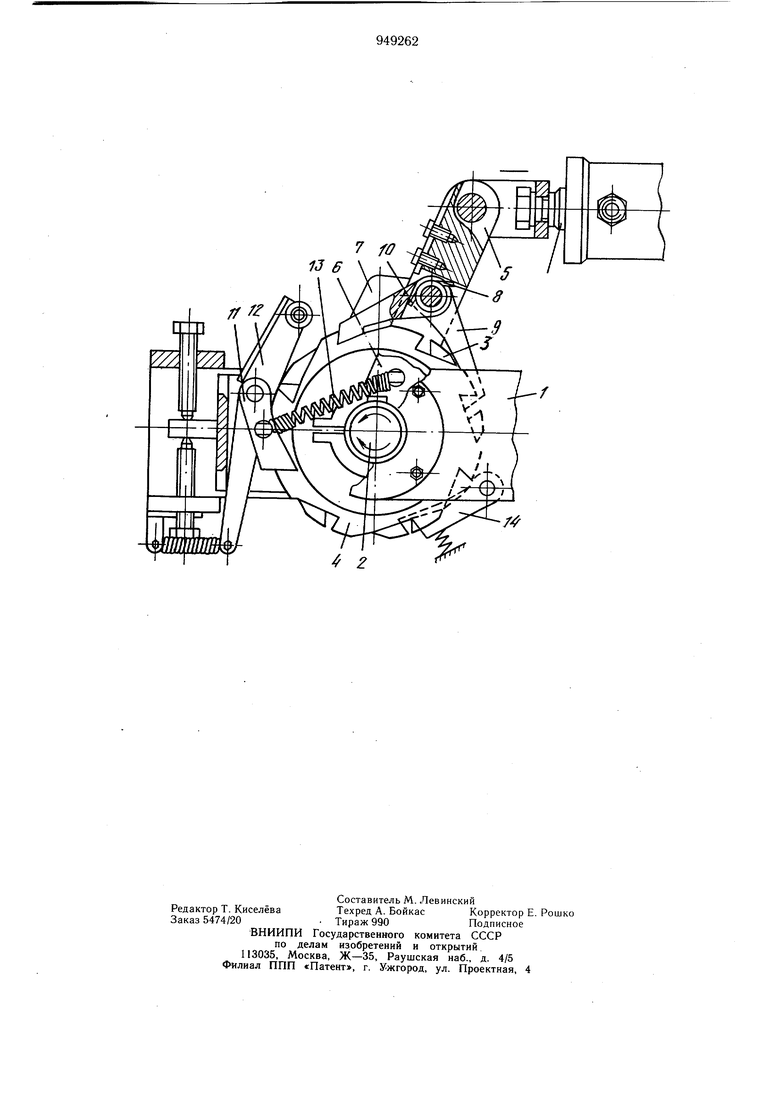
10 Поставленная цель достигается тем, что в храповом механизме, содержащем корпус, приводной вал с жестко закрепленными на нем храповыми колесами с встречно-направленными зубьями, поводок, рабочие и фиксирующие собачки, взаимодействующие с ко5 лесами,.и одна из фиксирующих собачек связана с поводком, рабочие собачки размещены на поводке и направлены в разные стороны, вторая фиксирующая собачка размещена на. корпусе, а механизм снабжен закрепленным на одной из рабочих собачек копиром, взаимодействующей с ним щтангой, на которой размещена первая фиксирующая собачка, и связывающей последнюю с поводком пружиной сжатия - растяжения. На чертеже изображен храповой механизм. Храповой механизм содержит корпус , приводной вал 2 с жестко закрепленными на нем храповыми колесами 3 и 4, поводок 5 с размещенной на нем рабочей собачкой 6, снабженной копиром 7 и отталкиваемой от храпового колеса 4 пружиной 8. Соосно и противоположно направленно собачке 6 на поводке 5 размещена вторая рабочая собачка 9, прижимаемая к храповом колесу 3 пружиной 10. Первая фиксирующая собачка 11 размещена на щтанге 12 и связана с поводком 5 пружиной 13 сжатия-растяжения. Вторая фиксирующая собачка 14 размещена на корпусе 1. Храповой механизм работает следующим образом. При движении поводка 5 в направлении, указанном на чертеже стрелкой, пружина 13 растягивается и удерживает фиксирующую собачку 11 в зацеплении с храповым колесом 4. Собачка 6 стремится откинуться из впадины колеса 4 под воздействием пружины 8. При дальнейщем движении поводка 5 на величину, необходимую для свободного выхода собачки 6, колесо 4 удерживается фиксирующей собачкой 11. Собачка 6 выводится из зацепления с храповым колесом 4 пружиной 8. При движении поводка 5 в обратном направлении против часовой стрелки относительно неподвижных вала 2 и храпового колеса 4 растянутая ранее пружина 13 сжимается и стремится вытолкнуть собачку 11 из зацепления с храповым колесом 4, чему препятствует крутящий момент на валу 2. Собачка 6 входит в зацепление с храповым колесом 4 при взаимодействии копира 7 со щтангой 12. Храповое колесо 4, собачка 6 с копиром 7 и поводок 5 вместе с валом 2 соверщают вращение на величину, необходимую для свободного выхода собачки 11 из зацепления против часовой стрелки, при этом сжатая пружина 13 выталкивает собачку 11 из зацепления с храповым колесом 4. Поводок 5 соверщает обратное движение, при этом собачка б в зацеплении с храповым колесом 4 и вал 2 соверщают вращательное движение по часовой стрелке на необходимый угол, арружина 13 натягивается и вводит собачку 11 в зацепление со следующим зубом храпового колеса 4, затем цикл повторяется. При отсутствии крутящего момента или при его действии на вал против часовой стрелки, поворот в направлении по часовой стрелке осуществляется с помощью храпового колеса 3 и собачек 9 и 14 по схеме обычного храпового механизма. Предлагаемый механизм позволит улучщить существующие подъемно-опускающие погрузочно-разгрузочные механизмы. Формула изобретения Храповой механизм, содержащий корпус, приводной вал с жестко закрепленными на нем храповыми колесами с встречно-направленными зубьями, поводок, рабочие и фиксирующие собачки, взаимодействующие с колесами, и одна из фиксирующих собачек связана с поводком, отличающийся тем, что, с целью обеспечения возможности поворота приводного вала в одном направлении независимо от направления воздействия на него нагрузочного момента, рабочие собачки размещены на поводке и направлены в разные стороны, вторая фиксирующая собачка размещена на корпусе, а механизм снабжен закрепленным на одной из рабочих собачек копиром, взаимодействующей с ним штангой, на которой размещена первая фиксирующая собачка, и связывающей последнюю с поводком пружиной сжатия-растяжения. Источники информации, принятые во внимание при экспертизе 1.Кожевников С. Н. Механизмы. М., «Машиностроение, 1976, с. 445-446, механизм 7.19. 2.Авторское свидетельство СССР № 229147, кл. F 16 Н 29/02, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи штучных заготовок из магазина | 1983 |
|
SU1159697A1 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ МОТОЦИКЛА | 1991 |
|
RU2019466C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ ГИЛЬЗОВОЙ МАШИНЫ | 1950 |
|
SU92081A1 |
| Механизм привода реверсивных транспортеров | 1973 |
|
SU464491A1 |
| Автоматическое поводковое устройство | 1978 |
|
SU719030A1 |
| Храповой механизм свободного хода | 1981 |
|
SU1027448A1 |
| Реверсивная муфта свободного хода | 1986 |
|
SU1318752A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1400714A1 |
| Дождевальный аппарат | 1986 |
|
SU1404028A1 |
| Храповой механизм | 1981 |
|
SU1033800A1 |