2. Устройство для осуществления способа по п.1, содержащее синуснокосинусный вращающийся трансформатор вход которого соединен с источником синусоидального сигнала переменногр тока, а выходы подключены к одним входам блока определения квадранта и через последовательно соединенные первый коммутатор и выпрямитель к одному входу элемента сравнения, источник синусоидального сигнала переменного тока подключен к другим входам элемента сравнения и блока определения квадранта, выход которого подключен к управляющему входу первого коммутатора, отличающ е е с я тем.,, что, с целью расширения диапазона однозначного преобразования угла, в .него введены последовательно соединенные формирователь опорных широтно-импульсных модулированных сигналов, втсрой коммутатор и сумматор, другой вход которого соединен с выходом элемента сравнения , а управляющий вход второго коммутатора соединен с выходом блока определения квадранта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в широтно-импульсный модулированный сигнал | 1983 |
|
SU1113827A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1262730A1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
| Способ преобразования угла поворота вала в код | 1988 |
|
SU1786662A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1179536A2 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1231610A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
1.Способ преобразования угла бала в широтно-импульсный модулированный сигнал основанный на прео(аэовании угла в электрические сигналы переменного тока, модулированные по амплитуде в функции синуса и косинуса угла поворота, определении одного из 1C-участков, которому соответствует текущее значение угла поворота, путем сравнения синусоидального сигнала переменного тока и юдyлIфoвaнныx сигналов по амплитуде и фазе, выделении на каждом участке напряжения, изменяющегося от нуля по синусоидальному закЪну, его клпрямлении, сравненении синусоидального сигнала переменного тока с нулевым напряжением и выпрямленным напряжением, формировании по моментам сравнения импульсов первого широтно-импульсного модулированного сигнала с периодом Jf равным периоду синусоидального сигнала переменного тока, отличающийся тем, что, с целью расширения диапазона однозначного i гфеобразования угла, формируют опорные гаиротно-импульсные модулирован(Л ные сигналы с периодом Т и длитель|-и о, i,...V-i) ностью импульсов f выбирают один из опорных широтноимпульсных модулированных сигналов в зависимости от участка, которому соответствует текущее значение угла поворота., и суммируют егО спервым СО 4 широтно-импульсным модулированным сигналом.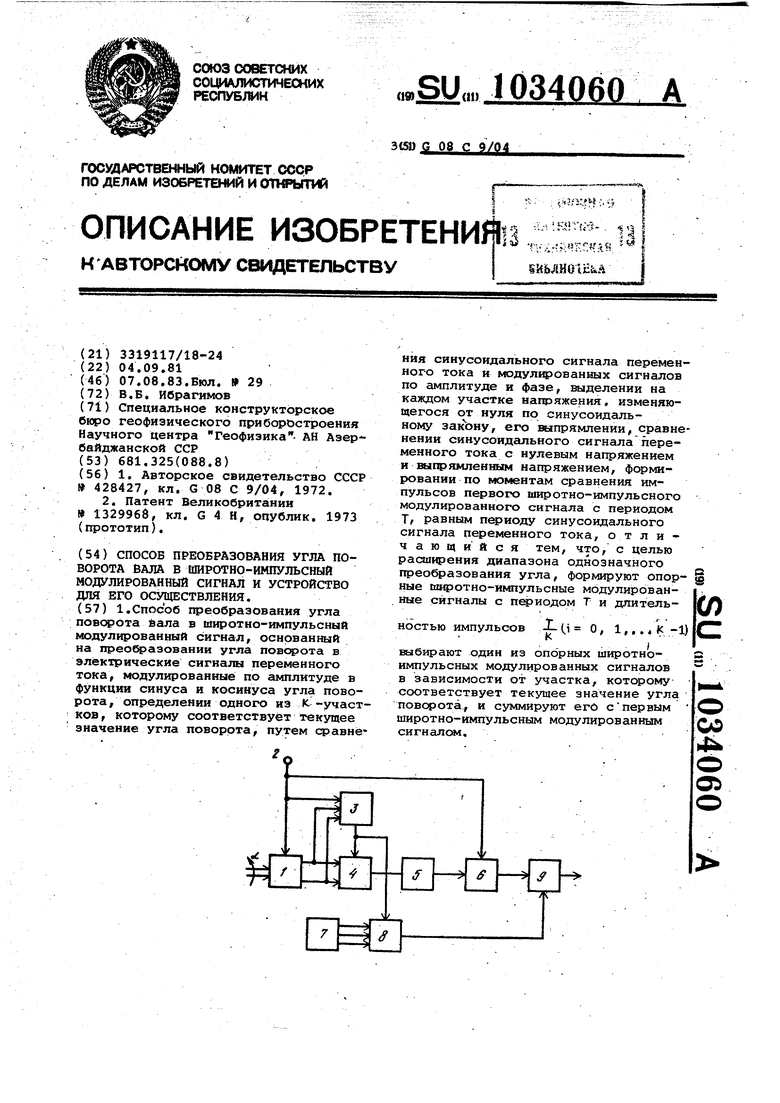
1
Изобретение относится к автоматике и вычислитнльной технике и может быть использовано для связи аналоговых источников информации с объектом управления.
Известны способы преобразования угла поворота в широтно-импульсный модулированный ШИМ сигнал, основанные на преобразовании угла повот рота в многофазные электрические сигналы переменного тока, модулированные в функции синуса угла повсхзота, выпрямлении этих сигналов, определении одного из К-участков, которому соответствует текущее значение угла поворота, выделении из выщзямленных сигналов напряжения, изменяющегося от нуля по синусоидальному закону, сравнении синусоидального сигнала переменного тока с нулевым напряжением и напряжением выделенным из выпрямленных сигналов и формировании по моментам сравнени импульсов ШИМ-сигналов с периодом, равным периоду синусоидального сигнала переменного тока. Далее ШИМсигналы преобразуются в код, которы согласуется с номером R-участка, которому соответствует текущее значение угла повфота ClJ.
, Недостатком способа является малый диапазон изменения длительности импульсов иим-сигнал6в.
Наиболее близким по технической сущности к предлагаемому Является способ преобразования угла поворота вала в ШИМ-сигнал, основанный на преобразовании угла поворота в электрические сигналы переменного тока, модулированные по амплитуде в функции синуса и косинуса угла поворота, определении одного из kучастков, которому соответствует текущее значение угла повсфота путе сравнения синусоидального сигнала переменного тока и модулированных
сигналов по амплитуде и фазе, выделении на каждом участке напряжения, изменяющегося от нуля по синусоидальному закону, его выпрямлении, сравнении синусоидального сигнала переменного тока с нулевым выпрям-; ленным натфяжением и выпрямленным напряжением, формщ)овании по моментам сравнения импульсов первого ШИМ-сигнала с периодом Т , равным периоду синусоидального сигнала пегременного тока 12..
Устройство для осуществления известного способа содержит синуснокосинусный вращающийся трансформатор, вход которого соединен с источникЪм синусоидального сигнала переменного тока, а выходы подключены к одним входам блока определения квадранта и через последовательно соединенные первый коммутатор и выпрямитель к одному входу элемента сравнения, источник синусоидального сигнала переменного тока подключен к другим входам элемента сравнения и блока определения квадранта, выхо которого подключен к ущ авляввдему входу первого коммутатора С2 J.
Недостатком известного способа и устройства для его осуществления, является малый диапазон однозначно го преобразования угла в ШИМ-сигнал ограниченный длительностью К-участка, т.е. 23Г радиан. К
Цель изобретения - расширение диапазона до 2Л однозначного преобразования угла поворота в ШИМ-сигнал..
Поставленная цель достигается тем, что согласно способу преобразования угла поворота вала в ШИМсигнал, основёшном на преобразовгГНИИ угла повсфота в электрические сигналы переменного тока, модулированные по амплитуде в функции синуса и К9синуса угла поворота, ощ еделении одного из К -участков которЬ соответствует текущее значение угла поворота, путем сравнения- синусоидального сигнала переменного тока и модулированных сигналов по амплитуде и фазе, выделении на каждом участке напряжения, изменяющегося от нуля по синусоидальному закону, его выпрямлении, сравнении синусоидального сигнала племенного тока с нулевым напряжением и выпрямленным Напряжением, форм1фовании по мо ментам сравнения импульсов первого ШИМ-сигнала. с периодом Т , равным периоду синусоидального сигнала пер менного тЬка, формируют опорные . ШИМ-сигналы с пфиодом f и длитель Т / ностью импульсов If-1 U 0,1,,.., К-1), выбирают один из ШИМ-сигналов в зависимости от участка, которому соответствует текущее значение угла поворота, и СУММ1ФУЮТ его с ШИМ-сигналом. Кроме того, в устройство для осу ществлёния гредпагаемого способа, содержащее синусно-косинусилй враща щийся трансформатор, вход которого соединен с источником синусоидального сигнала переменного тока, а выходы подключены к одним входам блока определения квадранта и через последовательно соединенные первый комиутатср и выпрямитель к одному входу элемента сравнения, источник синусоидального сигнала переменного тока Подключен к другим входам элемента сравнения и блока определения квадранта, выход которого подключен к управляющему входу коммутатора, .введены последовательно соединенные формирователь оперных ШИМ-сигнашоэ, второй коммутатор и сумматор, другой вход которого соединен с илходом элемента сравнения, а управляющий вход второго коммутатора соединен с выходом блока определения квадранта. На чертеже представлена блок-схе ма устройства для осуществления предлагаемого способа. Устройство содержит синусно-косинусный вращающийся трансформатор 1, вход которого соединен с источником 2 синусоидального сигнала пер менного тока, а выходы подключены к одним входам блока 3 определения квадранта и через последовательно соединенные коммутатор 4 и вы1чэямитель 5 к одному входу элемента 6 сравнения, источник 2 подкл чен к другим входам элемента б и блока 3, выход которого подключен к управляющему входу коммутатора 4, последовательно соединенные формиро ватель 7 опорных ШИМ-сйгналов, второй коммутатор 8 и сумматор 9, доуг вход которого соединен с выходсм элемента 6, а управляюиий вход коммутатсчза 8 соединен с выходом блока 3определения квадранта. Устройство работает следующим образом. Bkn объекта перемещения связан с синусно-косинусного вращающегося трансформатора (СКВТ / 1. На выходе источника 2 фсрм1фуются сигналы переменного тока с периодом Т. На шлходе СКВТ 1 формируются электрические сигналы п еменного тока, модулированные по амплитуде в функции синуса н косинуса угла поворота. В блоке 3 путем сравнения амплитуды и фазы входных сигналов формщ уется код квадранта, которсмщг соответствует текущее значение угла поворота ротора СКВТ. На выходе коммутатора 4выделяются сигналы переменного тока, соответствующие синусоидальному сигналу первого или третьего квадранта, которые в выфямителе 5 преофаэуются в сигналы постоянного тока, изменякяциеся от нуля по синусоидальному закону. Сигнал переменного тока источника 2 сравнивается в элементе 6 с нулевым напряжением и напряжением, сформированным выпрямителем 5. В результате на выходе элемента б формируются ИИМ-сигНсШ с . периодом Т и длительностью импульсов, пропорциональный углу поворота ротора СКВТ 1 внутри квадранта. Максимальная длительность выходных ямпульсов элемента б равна . Фсрмирователь 7 вырабатывает три последовательности ШйМ-сигналов с периодом Т и длительностью импульсов Т Т ЗТ т 2 -г. Если текущее значение угла поворота соответствует второму, третьему или четвертому октанту, то в соответствии с ущ)авляющим сигналом блока 3 на выходе коммутаторе 8 выбирается одна из трех последовательностей с длительностью импульсов Т т ЗТ соответственно х или -5-, или --г, ШИМ-сигналы с выхода элемента б и коммутатора 8 поступают на -входы сумматора 9,на выходе которого формируется ШИМ-сйгнал с периодом Т и длительностью Импульсов, изменяющихся от О до Т при изменении угла поворота от О до 360°. Выходные импульсы элемента б формируются в первой четверти периода исходного сигнала источника 2. Передние фронты этих импульсов совпадают с моментами переходов выходного сигнала источника 2 через нуль при положительном градиенте. Для обеспеченчя синхронизации выходных импульсов элемента б и коммутатора 8 вход формирователя 7 должен быть засйнхро$1034060
ниэирован выходными сигналами ис- Таким образом, предлагаемый споточника 2, а задние фронты; выходных соб преобразования угла поворота в импульсов формирователя 7 должны пропорциональный ШИМ-сигнал и устройсовпадать с передним фронтом выход- ство для его осуществления расширяных импульсов элемента б. Тогда , ют диапазон однез начного преобразоматор 9 превращается в овычный логи-5 вания угла от/2У до 2t ческий элемент ИЛИ. К
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линия изготовления реберного заполнителя | 1985 |
|
SU1329968A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
