««iiiligib-aiafe;. ются соответственно пртым и шестым входами блока формирования, второй элемент И-НЕ, первый вход которого соединен с выходом второго триггера и с четвертым входом элемента 5И, а второй вход - с выходом элемента 5И третий элемент И-НЕ, первый вход которого соединен с выходом третьего триггера и с четвертым входом элемента 4И, а второй вход - с выходом элемента 411, и второй элемент «И, первый вход которого соединен с выходом второго элемента И-НЕ, второй вход - с выходом третьего элемента И-НЕ и с пятым входом элемента 5И, третий вход - с третьим входом элемента 5И, четвертый вход - с выходом первого элемента И-НЕ, а выход является четвертым выходом блока формирования. 3. Устройство по п.1, о т л и ч а ю |д е е с я тем, что блок позиционирования включает в себя первый эле мент ЗИЛИ, первый, второй и третий входы которого являются соответственно пятым, шестым и седьмым входам блока позиционирования, первый элемент И, первый вход которого соединен с третьим входом элемента ЗИЛИ, второй вход является третьим входом 1 9 , блока позиционирования, а выход является четвертым выходом блока позиционирования, второй элемент И, первый вход которого соединен с вторым входом первого элемента ЗИЛИ, второй вход является первым входом блока позиционирования, а выход является пятым выходом блока позиционирования, третий элемент И, первый вход которого соединен с первым входом первого элемента ЗИЛИ, а второй вход является вторым входом блока позиционирования, второй элемент ЗИЛИ, каждый вход которого соединен с выходом одного из элементов И, а выход является третьим выходом блока позиционирования, инвертор, вход которого соединен с выходом второго элемента ЗИЛИ, элемент ЗИ, первый вход которого является четвертым входом блока позиционирования , второй вход соединен с выходом первого элемента ЗИЛИ, третий вход с выходом инвертора, а выход является вторым выходом блока позиционирования, и элемент-ИЛИ-НЕ, первый вход которого соединен с выходом второго элемента ЗИЛИ, второй вход - с первым входом элемента ЗИ, а выход является первым выходом блока позиционирования.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции дисбаланса | 1985 |
|
SU1273758A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1037094A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
Изобретение относится к машиностроению, а именно, к средствам автоматической балансировки коленчатых -валов.
Известно устройство к балансировочному станку, содержащее два измерительных канала, каждый из которых обеспечивает измерение параметров дисбаланса коленчатого вала в прямоугольной системе координат, определяет необходимость высверливания при .коррекции дополнительного отверстия на противовесе коленчатого вала, блок коррекции, куда и передается информация о высверливании,дополнительного отверстия EI .
Недостатком этого устройства является то, что оно не обеспечивает управления работой блока коррекции балансировочного автомата.
Наиболее близким по технической сущности к предлагаемому является устройство для коррекции дисбаланса коленчатого вала, содержащее блок измерения, блок отсчета, первый вход которого соединен с первым выходом блока измерения, первый и второй входы блока измерения соединены соответственно с вторым и третьим входами блока отсчета, блок коррекции, первый выход которого соединен с четвертым входом блока отсчета, и блок управления, выход которого соединен с вторым выходом, а выход - с вторым входом блока коррекции С2 .
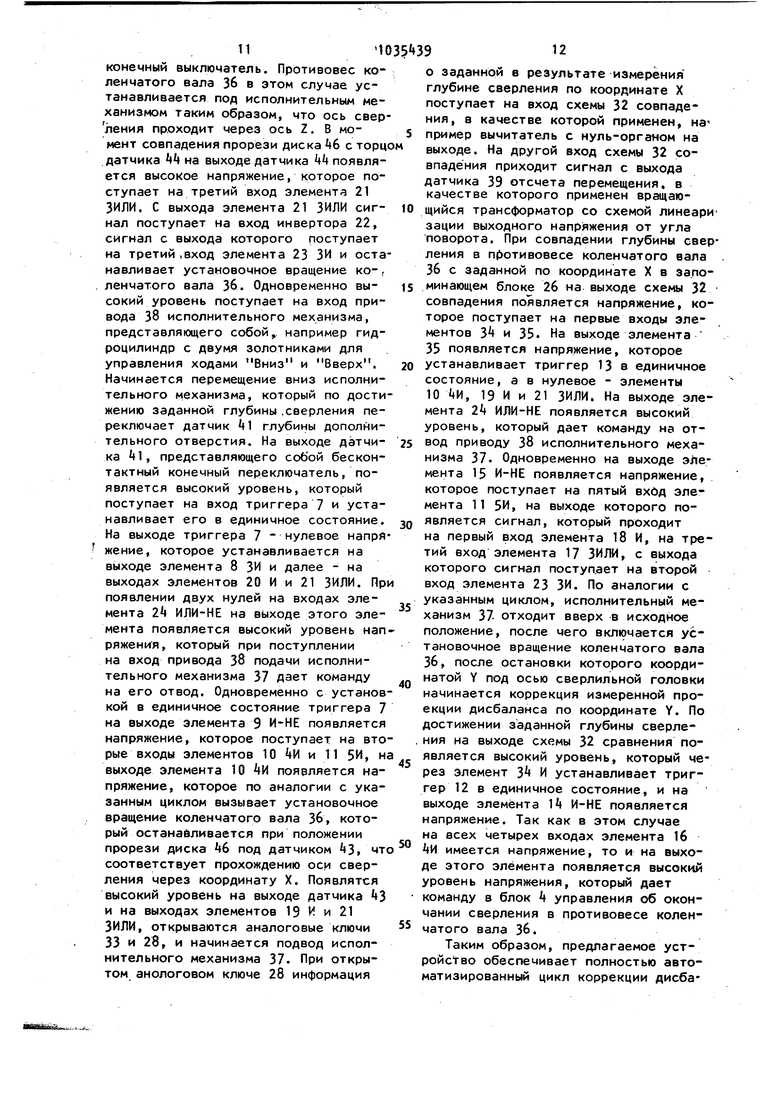
Недостатком этого устройства является то, что оно не обеспечивает полной автоматизации дисбаланса при необходимости нескольких сверлений в противовесе коленчатого вала. Цель изобретения - повышение производительности процесса балансировки Указанная цель достигается тем, что устройство для коррекции дисбаланса коленчатого вала, содержащее блок измерения, блок отсчета, первый .вход которого соединен с первым выходом блока измерения, первый и второй входы блока измерения соединены соответственно с вторым и третьим входами блока отсчета, блок коррекции первый выход которого соединен с четвертым входом блока отсчета, и блок у равления, снабжено блоком по:зициониро вания, первый, второй, третий и четвертый входы которого соединены соот ветственно с вторым, третьим, четвер тым и пятым выходами блока коррекции первый и второй выходы - с первым и вторым входами блока коррекции, третий выход - с третьим входом блока коррекции и пятым входом блока отсчета, четвертый выход - с вторым входом блока отсчета, а пятый выход с третьим входом блока отсчета, блоком формирования команд, первый, второй и третий входы которого соединены с вторым, третьим и четвертым выходами блока измерения, четвертый вход - с шестым выходом блока коррекции, пяты и шестой - с первым и вторым выходами блока отсчета, первый, второй и третий выходы - соответственно с пятым, шестым и седь№1м входами блока позиционирования, а четвертый выход и седьмой вход - соответственно с входом и выходом блока управления, Кроме того, блок формирования команд включает в себя первый триггер, вход которого является четвертым входом блока формирования, элемент ЗИ, первый вход которого соединен с выходом этого триггера, второй вход является первым входом блока формирования, а третий вход является седь мым входом блока формирования, первы элемент И-НЕ, первый вход которого соединен с выходом триггера, второй с выходом элемента ЗИ и является пер вым выходом блока формирования, пер- вый элемент (И, первый вход которого является вторым входом блока формирования, второй вход соединен с выхо дом элемента И-НЕ, третий вход - с третьим входом элемента ЗИ, а выход является вторым выходом блока формирования, элемент 5И, первый вход которого является третьим входом блока формирования, второй вход соединен с выходом элемента И-НЕ, третий вход с- третьим входом элемента а выход является третьим выходом блока формирования, второй и третий триггеры, входы которых являются соответственно пятым и шестым входами блока формирования, второй элемент , первый вход которого соединен с выходом второго триггера и с четвертым входом элемента 5И, а второй вход - с выходом элемента 5И, третий элемент И-НЕ, первый вход которого соединен с выходом третьего триггера и с четвертым входом элемента И, а второй вход - с выходом элемента И, и второй элемент И, первый вход которого соединен с выходом второго элемента И-НЕ, второй вход - с выходом третьего элемента И-НЕ и с пятым входом элемента 5И, третий вход - с третьим входом элемента 5И, четвертый вход с выходом первого элемента И-НЕ, а выход является четвертым выходом блока формирования. Блок позиционирования включает в себя первый элемент ЗИЛИ, первый, второй и третий входы которого являются соответственно пятым, шестым и седьмым входами блока позиционирования, первый элемент И, первый вход которого соединен с третьим входом элемента ЗИЛИ, второй вход является третьим входом блока позиционирования, а выход является четвертым выходом блока позиционирования, второй элемент И, первый вход которого соединен с вторым входом первого элемента ЗИЛИ, второй вход является первым входом блока позиционирования, а выход является пятым выходом блока позиционирования, третий элемент И, первый вход которого соединен с первым входом первого элемента ЗИЛИ, а второй вход является вторым входом блока позиционирования, второй элемент ЗИЛИ, каждый вход которого соединен с выходом одного из элементов И, а выход является третьим выходом блока позиционирования, инвертор, вход которого соединен с выходом второго элемента . ЗИЛИ, элемент ЗИ, первый вход кото рого является четвертым входом блока позиционирования, &торой вход соединен с выходом первого элемента ЗИЛИ, третий вход - с выходом инвертора, а выход является вторым выходом блока позиционирования, и элемент ИЛИ-НЕ, первый вход которого соединен с выходом второго элемента ЗИЛИ, второй вход - с первым входом элемента ЗИ, а выход является первым выходом блока позиционирования. На чертеже изображена структурная схема устройства для коррекции дисбаланса коленчатого вала. Устройство содержит блок 1 измерения, блок 2 отсчета, первый вход которого соединён с первым выходом блока 1 измерения, первый и второй входы блока 1 измерения соединены со ответственно с четвертым и пятым вхо дами блока 2 отсчета, блок 3 коррекции, первый выход которого соединен с вторым входом блока 2 отсчета, бло Ц управления, блок 5 позиционированйя, первый, второй. Третий и четвертый входы которого соединены соот ветственно с вторым, третьим, четвер
тым и пятым выходами блока 3 коррекции, первый и второй выходы - с первым и вторым входами блока 3 коррекции, третий выход - с третьим входом блока 3 коррекции и третьим входом блока 2 отсчета, четвертый выход - с четвертым входом блока 2 отсчета, а пятый выход - с пятым входом блока 2 отсчета, блок 6 формирования команд, первый, второй и третий входы которого соединены с вторым, третьим и четвертым выходами блока 1 измерения, четвертый вход - с шестым выходом блока 3 коррекции, пятый и шестой с первым и вторым выходами блока отсчета, первый, второй и третий выходы - соответственно, с пятым, шестым и седьмым входами блока 3 позиционироёания, а четвертый выход и седьмой вход - соответственно с входом и выходом блока k управления.
Блок б формирования команд включает в себя первый триггер 7 вход которого является четвертым входом блока 6 формирования, элемент 8 ЗИ, первый вход которого соединен с выходом триггера 7, второй вход является первым входом блока 6 формирования, а третий вход является седьмым входом блока б формирования, первый элемент 9 И-НЕ, первый вход которого соединен с выходом триггера 7 второй вход - с выходом элемента 8 ЗИ и является первым выходом блока формирования, первый элемент 10 itM, первый вход которого является вторым входом блока б формирования, второй вход соединен с выходом элемента Э И-НЕ, третий вход - с третьим вховторой вход - с выходом элемента
10«И, а второй элемент 1б И, первый вход которого соединен с выходом второго элемента 1 И-НЕ, второй вход - с выходом третьего элемента 15 И-НЕ, и с пятым входом элемента
115И, третий вход - с третьим входом элемента 11 5И, четвертый вход с выходом третьего элемента 15 И-НЕ, а выход является четвертым выходом блока б сравнения.
Блок 5 позиционирования включает в себя первый элемент 17 ЗИЛИ, первый, второй и третий входы которого, являются соответственно пятым, шестым, и седьмым входами блока 5 позиционирования, первый элемент 18 И, первый вход которого соединен с третьим входом элемента 17 ЗИЛИ, второй вход является третьим входом блока 5 позиционирования, а выход является четвертым выходом блока 5 позиционирования, второй элемент 19 И, первый вход которого соединен с вторым входом первого элемента 17 ЗИЛИ, второй вход является первым входом блока 5 позиционирования, а выход - пятым выходом блока 5 позиционирования, третий элемент 20 И, первый вход которого соединен с первым входом первого элемента 17 ЗИЛИ, а второй вход является вторым входом блока 5 позиционирования, второй элемент 21 ЗИЛИ, каждый вход которого соединен с выходом одного из элементов 18-20 И, а выход яв ляется третьим выходом блока 5 позиционирования, инвертор 22, вход кото-, рого соединен с выходом второго элемента 21 ЗИЛИ, элемент 23 ЗЛ, первый дом элемента 8 ЗИ, а выход является вторым выходом блока 6 формирования, элемент 11 5И, первый вход которого является третьим входом блока 6 формирования, второй вход соединен с выходом элемента 9 И-НЕ, третий входс третьим входом элемента 10 fH, а выход является третьим выходом блока 6 формирования, второй и третий триггеры 12 и 13, входы которых являются соответственно пятым и шестым входами блока 6 формирования, второй элемент I И-НЕ, первый вход которого соединен с выходом второго триггера 12, с четвертым входом элемента 11 5И, а второй вход - с выходом элемента 11 5И, третий элемент 15 И-НЕ, первый вход которого соединен с выходом третьего триггера 13 и с четвертым выходом элемента 10 , а вход которого является четвертым входом блока 5 позиционирования, второй вход соединен с выходом первого элемента 17 ЗИЛИ, третий вход - с выходом инвертора 22, а выход является вторым выходом блока 5 позиционирования, и элемент 2k ИЛИ-НЕ, первый вход которого соединен с выходом второго элемента 21 ЗИЛИ, второй вход - с пер вым входом элемента 23 ЗИ, а выход является первым выходом блока 5 позиционирования. Блок 1 измерения, включает в себя двухканальный.измеритель 25 обеспечивающий измерение параметров дисбаланса коленчатого вала в прямоугольной системе координат, аналоговый запоминающий блок 2б, входы которого соединены с выходами первого канала измерителя 25, два аналоговых ключа 27 и 28, вход каждого из которых соединен с одним из выходов запоминающего блока 26, а выходы соединены между собой и являются первым выходом блока 1 измерения, три триггера 2931, вход каждого из которых соединен с одним из выходов измерителя 25, а выходы являются вторым, третьим и четвертым выходом блока 1 измерения соответственно. Триггер 29 предназначен для выдачи команды о необходимости высверливания дополнительного отверстия, триггер 30 -о составляющей дисбаланса по координате X, а триггер 31 - о составляющей дисбалан са по координате Y. Блок 2 отсчета включает в себя схему 32 совпадения, первый вход которой является первым входом блока 2 отсчета, аналоговый ключ 33 выход которрго соединен с вторым входом схемы 32 совпадения, а вход являетс } вторым входом блока 2 отсчета, два эл элемента З и 35 И, первые входы кот рых соединены между собой и с выходо схемы 32 совпадения, второй вход эле мента З .И .является четвертым входом блока 2 отсчета, а второй вход элемента 35 И является пятым входом блока 2 отсчета. Блок 3 коррекции; кинематически связан с коленчатым валом 36, на котором через X и У обозначены оси кор рекции на противовесе, а через Z ось, через которую проходит направление высверливания дополнительного отверстия. Блок 3 содержит исполни,тельный механизм 37 в качестве кото рого применена сверлильная головка. 10 8 привод 38 подачи исполнительного механизма первый вход которого является третьим входом блока 3 коррекции а второй вход является первым входом блока 3 коррекции, датчик 39 отсчета перемещений, кинематически связанный с исполнительным механизмом, датчик «О, выход которого является пятым выходом блока 3 коррекции, датчик 41 глубины дополнительного отверстия, выход которого является шестым выходом блока 3 коррекции привод k2 установочного вращения, вход которого является вторым входсм блока 3 коррекции, датчик З ориентации коленчатого вала по координате X, выход которого является вторым выходом бяо- . ка 3 коррекции, датчик )( ориентации коленчатого вала под дополнительное отверстие, выход которого является третьим выходом блока 3 коррекции, датчик 5 ориентации коленчатого вала по координате У, выход которого является четвертым выходом блока 3 коррекции, и металлический диск с прорезью, установленный на валу привода Ц2 установочного вращения колеичатого вала. Устройство работает следующим образом. Полный автоматический цикл балансировки включает два основных этапа: измерение параметров дисбаланса и коррекцию дисбаланса по результатам измерения. Так как в предлагаемом устройстве рассматривается только процесс автоматизации коррекции дисбаланаса, то задача блока 1 измерения в объеме предлагаемого устройства сводится к выдаче необходимой для работы блока 3 коррекции информации о параметрах дисбаланса коленчатого вала в прямоугольной системе координат и необходимых команд для последовательной обработки трех отверстий (двух по координатам и одного дополнительного ) в противовесе. В процессе измерения помимо аналоговой информации о параметрах дисбаланса, в зависимости от его значения и угла, получают дискретную ин1 юрмация на выходах триггеров 29-31 единичное состояние указывает на необходимость сверления по данной координате. При этом могут получаться различные комбинации состояния триггеров . Наиболее общим является случай, когда все триггеры находятся в единичном состоянии, т.е. сверл ние необходимо производить по трем координатам X, Y и Z. Параметры дисбаланса коленчатого вала 36 измеряются и запоминаются в двухканальном измерителе 25. Измерение параметров дисбаланса произво дится в прямоугольной системе координат, и аналоговая информация о параметрах дисбаланса для правой плоскости коррекции для каждой из осей коррекции передается после окончания измерения в запоминающий блок 26. Одновременно измеритель 25 с помощью компараторов (на чертеже не показаны) установленных на выходе каждой из координат и настроенных на минимальный уровень, соответствуюи1ий остатом ному дисбалансу коленчатого вала по координате, определяют необходимость коррекции дисбаланса по каждой из координат и выдает эту информацию на триггеры 30 и 31. Если по координате X или Y требуется провести коррекцию дисбаланса, соответствующую этой коор динате, триггер (30 для X и 31 для Y) устанавливается в единичное состояние после окончания измерения и сохраняет это состояние до окончания коррекции дисбаланса. Если значение коррекции по одной из координат больше предельно допустимого, что соответствует максимальной глубине сверления, измеритель 25 производит измерение параметров дисбаланса по координатам X и Y с учетом дополнительного отверстия между осями коррекции, совпадающим с X и Y. При этом команда на сверление дополнительного отверстия выдается измерителем 25 на триггер 29, единичное состояние которого также сохраняется до конца цикла коррекции. Таким образом, перед началом коррекции дисбаланса в правой плоскости имеется информация в запоминающем блоке 2б о глубине сверления по каждой из координат и информация, записанная в триггерах 29-31, о необходимости сверления .трех отверстий в противовесе коленчатого вала. Так как работа блоков 1 и 3 измерения и коррекции при измерении и коррекции дисбаланса по левой плоское ти коррекции полностью идентична с правой, то левый канал измерителя 25 содержит только аналогичные с правым каналом выходы без указания их связей с блоком 3 коррекции. 1 Э .10 Перед началом работы блока 3 коррекции исполнительный механизм 37 находится вверху, т.е. в исходном положении, которое контролируется датчиком kQ контроля исходного положения, представляющим собой бесконтактный конечный выключатель. Работа блока 3 коррекции начинается по команде блока 4 управления, подаваемой одновременно на входы триггеров 7, 12и 13, и происходит их установка в нулевое состояние. За нулевое состояние триггера принимается состояние, при котором на выходе триггера присутствует низкий уровень напряжения. Каждый из трех триггеров 7, 12 и 13R-типа с установкой в нулевое состояние по R-входу низким уровнем напряжения. Когда на R-входе высокий уровень, то при поступлении сигнала на S-вход триггер устанавливается в единичное состояние, характеризующееся наличием на прямом выходе высокого уровня напряжения и сохраняет это состояние до следующего импульса установки в нулевое состояние по R-входу. Связи блока k управления с триггерами 7, 12 и 13 на схеме не показаны. По команде Начало коррекции из блока -управления, подаваемой на соединенные между собой третьи входы элементов 8 ЗИ, 10 tM и 11 5И, на выходе элемента 8 ЗИ появляется высокий уровень, так как на первом его входе - сигнал с выхода триггера 7, а на втором входе - с выхода триггера 29. Высокий уровень с выхода элемента 8 ЗИ поступает на первый вход элемента 17 ЗИЛИ, на выходе которого также появляется высокий уровень напряжения, поступающий на вход элемента 23 ЗИ. Так как исполнительный механизм 37 находится в исходном положении, то на первом входе элемента 23 ЗИ - уровень напряжения. На выходе элемента 23 ЗИ появляется высокий уровень, который поступает на вход привода Й2 установочного вращения коленчатого вала Зб. Привод k2 представлят собой, например электродвигатель со схемой управления, высокий уровень на входе которой вызывает вращение электродвигателя, а низкий - остановку. Вращение коленчатого вала продолжается до тех пор, пока прорезь на диске 6 не совпадает с торцом датчика f, представляющего собой бесконтактный конечный выключатель. Противовес коленчатого вала 36 в этом случае устанавливается под исполнительным механизмом таким образом, что ось сверления проходит через ось Z. В момент совпадения прорези диска с торцо датчика на выходе датчика 44 появляется высокое напряжение, которое поступает на третий вход элемента 21 ЗИЛИ. С выхода элемента 21 ЗИЛИ сигнал поступает на вход инвертора 22, сигнал с выхода которого поступает на третий .вход элемента 23 ЗИ и останавливает установочное вращение ко-, ленчатого вала Зб. Одновременно высокий уровень поступает на вход привода 38 исполнительного механизма, представляющего собой например гидроцилиндр с двумя золотниками для управления ходами Вниз и Вверх. Начинается перемещение вниз исполнительного механизма, который по дости жению заданной глубины .сверления переключает датчик 41 глубины дополнительного отверстия. На выходе датчика 41, представляющего собой бесконтактный конечный переключатель, появляется высокий уровень, который поступает на вход триггера 7 и устанавливает его в единичное состояние. На выходе триггера 7 нулевое напря жение, которое устанавливается на выходе элемента 8 ЗИ и далее - на выходах элементов 20 И и 21 ЗИЛИ. Пр появлении двух нулей на входах элемента 24 ИЛИ-НЕ на выходе этого элемента появляется высокий уровень нап ряжения , который при поступлении на вход привода 38 подачи исполнительного механизма 37 Дает команду на его отвод. Одновременно с установ кой в единичное состояние триггера 7 на выходе элемента 9 И-НЕ появляется напряжение, которое поступает на вто рые входы элементов 10 4И и 11 5И, н выходе элемента 10 4И появляется напряжение, которое по аналогии с указанным циклом вызывает установочное вращение коленчатого вала Зб, который останавливается при положении прорези диска 46 под датчиком 43, чт
соответствует прохождению оси сверления через координату X. Появлятся высокий уровень на выходе датчика 43 и на выходах элементов 19 И и 21 ЗИЛИ, открываются аналоговые ключи 33 и 28, и начинается подвод исполнительного механизма 37. При открытом анологовом ключе 28 информация
де этого элемента появляется высокий уровень напряжения, который дает команду в блок 4 управления об окончании сверления в противовесе коленчатого вала Зб.
Таким образом, предлагаемое устройство обеспечивает полностью автоматизированный цикл коррекции дисбаО заданной в результате измерения глубине сверления по координате X поступает на вход схемы 32 совпадения, в качестве которой применен, на пример вычитатель с нуль-органом на выходе. На другой вход схемы 32 совпадения приходит сигнал с выхода датчика 39 отсчета перемещения, в качестве которого применен вращающийся трансформатор со схемой линеарИ зации выходного напряжения от угла поворота. При совпадении глубины сверления в противовесе коленчатого вала 36 с заданной по координате X в запоминающем блоке 26 на выходе схемы 32 совпадения появляется напряжение, которое поступает на первые входы элементов 34 и 35. На выходе элемента 35 появляется напряжение, которое устанавливает триггер 13 в единичное состояние, а в нулевое - элементы 10 4И, 19 И и 21 ЗИЛИ. На выходе элемента 24 ИЛИ-НЕ появляется высокий уровень, который дает команду на отвод приводу 38 исполнительного механизма 37. Одновременно на выходе элемента 15 И-НЕ появляется напряжение, которое поступает на пятый вхОд элемента 11 5И, на выходе которого появляется сигнал, который проходит на первый вход элемента 18 И, на третий вход элемента 17 ЗИЛИ, с выхода которого сигнал поступает на второй вход элемента 23 ЗИ. По аналогии с указанным циклом, исполнительный механизм 37 отходит вверх в исходное положение, после чего включается установочное вращение коленчатого вала 36, после остановки которого координатой Y под осью сверлильной головки начинается коррекция измеренной проекции дисбаланса по координате Y. По достижении заданной глубины сверления на выходе схемы 32 сравнения появляется высокий уровень, который через элемент 34 И устанавливает триггер 12 в единичное состояние, и на выходе элемента 14 И-НЕ появляется напряжение. Так как в этом случае на всех четырех входах элемента 16 4И имеется напряжение, то и на выхоланса коленчатого вала с учетом сверг лемий отверстий по координатам и до.полнительнрго отверстия между осями
координат; использование его повышает производительность процесса балансировки коленчатых валов на 30%.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторс-кое свидетельство СССР по заявке № 3257797/25-28, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для коррекции дисбаланса ротора | 1976 |
|
SU599173A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
