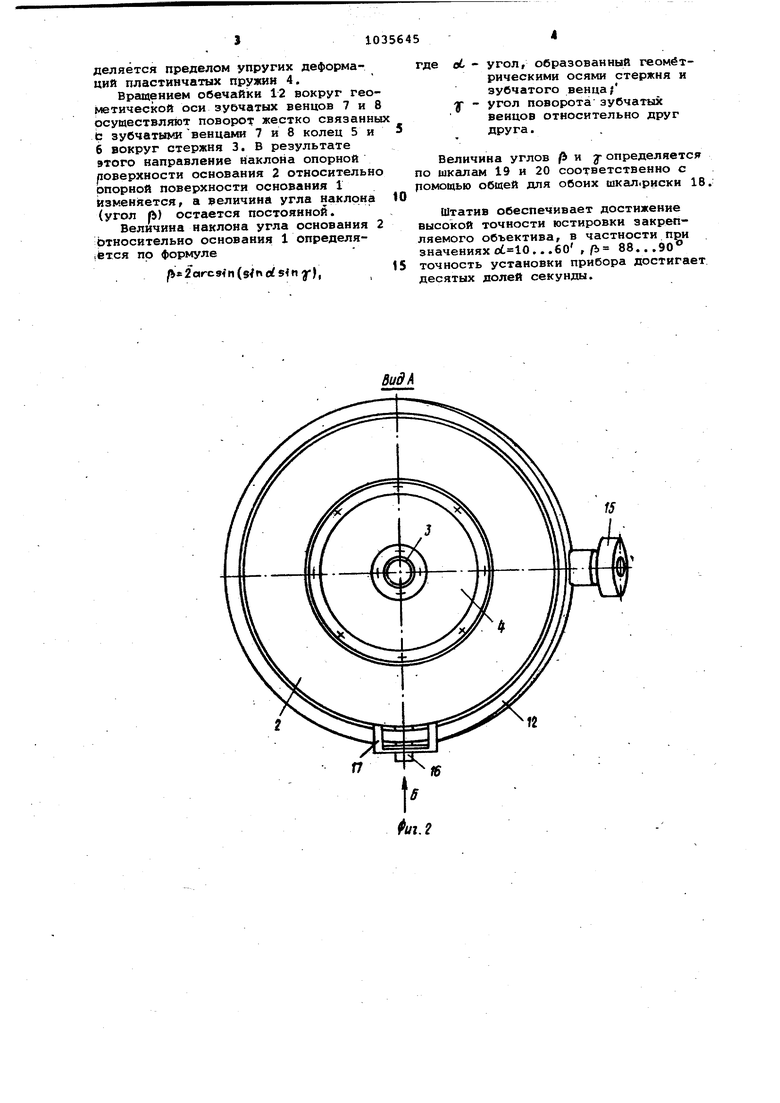
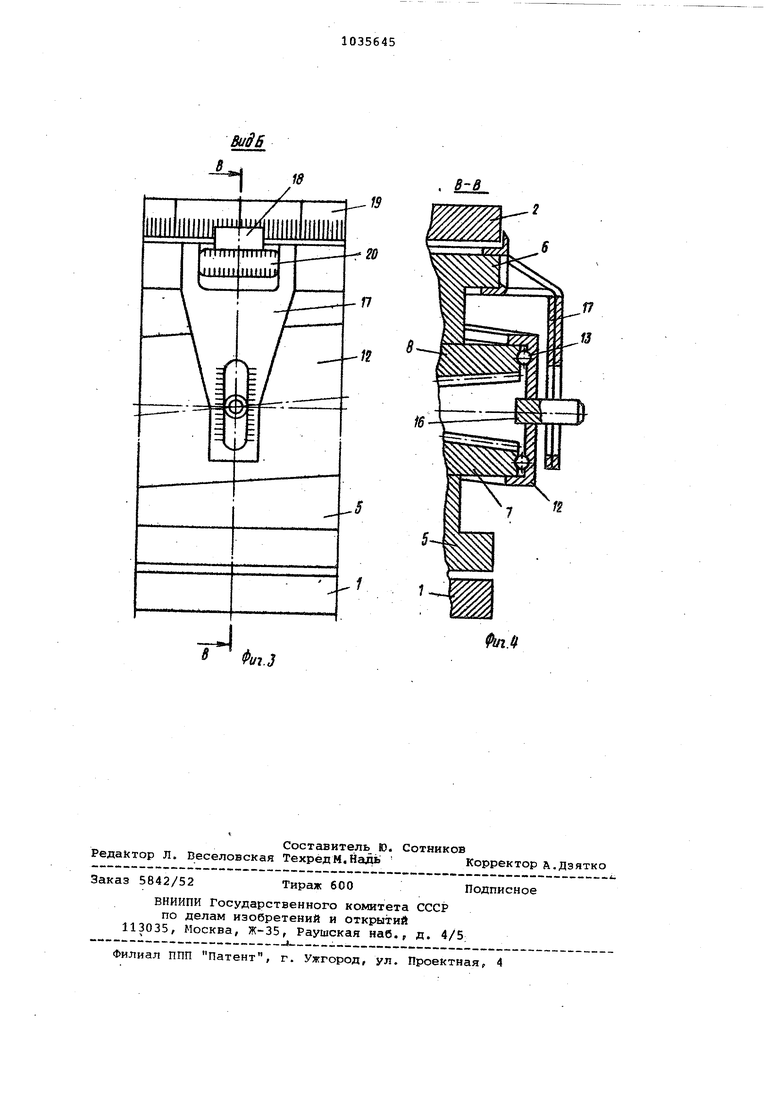
Изобретение относится к приборостроению, в частности к средствам, обеспечивающим точную ориентацию в пространстве закрепленного на них объекта,, Известно координатное устройство содержащее верхнее основание для размешения ориентируемого объекта, нижнее основание и несколько кинема тических пар, посредством которых верхнее и нижнее основания связаны между собой с возможностью обеспече ния шести степеней свободы верхнего основания ClJНедостатком данного устройства является/неудобство в эксплуатации, так как для ориентации верхнего осн вания необходимо выполнить большое количество установочных операций.Наиболее близок по технической сути к предложенному штатив, содержащий верхнее и нижнее основания, средство соединения оснований между собой и узел изменения относительного положения оснований 2. Недостаток такого штатива состои в невысокой степени точности юстировки, так как при фиксации взаимного положения оснований происходит отклонение от заданного положения. Цель изобретения - повышение точности юстировки. Поставленная цель достигается тем, что в штативе, содержащем верх нее и нижнее основания,- средство соединения оснований между собой и узел изменения относительного пол жения оснований, верхнее и нижнее основания выполнены в видё фланцев цилиндрическими выступами, обращенными навстречу друг другу, и отверстиями для размещения средства соединения оснований между собой, выполненного в виде стержня, концы которог жестко соединены с соответствующими фланцамиПластинчатыми пружинами, а узел изменения относительного положения оснований выполнен в виде обечайки, двух колец с зубчатыми коническими венцами и промежуточной шестерни, причем кольца размещены в обечайке и кинематически связаны ,между собой посредством промежуточ1ной шестерни, ось которой закреплен в обечайке и образует острый угол с геометрической осью стержня, при этом каждое из колец установлено на цилиндрическом выступе соответствующего фланца с возможностью взаимодействия с ним через промежуточные тела качения. На фиг. 1 изображен штатив, общий на фиг. 2 - вид А на фиг. 1 на фиг. 3 - вид Б на фиг. 2, на фиг. 4 - сечение В-В на фиг. 3. Штатив сьдержит нижнее 1 и.верхнее 2 основания, соединенные между собой посредством полого стержня и пластинчатых пружин 4. На обращенных друг к другу цилиндрических выступах фланцев, в виде которых выполнены основания 1 и 2 ,соответственно размещены кольца 5 и б с жестко закрепленными на них зубчатыми венцами 7 и 8, Кольца 5 и 6 взаимодействуют с фланцами оснований 1 и 2 через промежуточные тела качения в виде шариков 9 и прижаты к ним с помощью тарельчатых пружин 10, закрепленных посредством шайб 11. Зубчатые венцы 7 и 8 размещены в обечайке 12 и взаимодействуют с «ей посредством тел качения в виде шариков 13. Обечайка 12 выполнена из двух жестко связанных между собой полуколец. В обечайке 12 установлена коническая шестерня 14 с маховичком 15 и поводок 16. Шестерня 14 входит в зацепление с зубчатыми венцами 7 и 8, при этом ее геометрическая ось образует с опорной поверхностью основания 1 некоторый угол ot. На кольце 6 и поводке 16 установлено кольцо - указатель 17 с риской 18. На пружинах цилиндрических поверхностей основания 2 и кольца б нанесены соответственно шкала 19 для .определения угла поворота обечайки 12 и шкала 20 для определения угла наклона основания 2. Штатив работает следующим образом. Предварительно сам штатив закреп- ляют посредством нижнего основания 1 на неподвижной поверхности, а на его верхнем основании 2 закрепляют требующий точной ориентации в пространстве прибор. В исходном положении опорные поверхности оснований 1 и 2 параллельны друг другу. Вращением шестерни 14 посредством маховичка 15 зубчатые венцы 7 и 8 поворачиваются относительно друг друга и обечайки 12 вокруг их собственной геометрической оси, образующей с геометрической осью стержня 3 угол oL. При этом жестко связанные с зубчатыми венцами 7 и 8 кольца 5 и б, вращаясь вместе с зубчатыми венцами и взаимодействуя с основаниями 1 и 2 посредством шариков 9, стремятся. развернуть основания относительно друг друга вокруг геометрической оси перпендикулярной геометрической оси стержня 3. Так как основание 2жестко закреплено на неподвижной поверхности, то поворот может осуществить только основание 2. Таким образом, в результате вращения шестерни 14 основание 2 поворачивается относительно основания 1 вокруг оси перпендикулярной геометрической оси стержня 3 на некоторый угол /з, максимальная величина которого опреЯвляется пределом упругих деформаций пластинчатых пружин 4. Вращением обечайки 12 вокруг гео метической оси зу&чатых венцов 7 и осуществляют поворот жестко связанн 1з зубчатымивенцами 7 и 8 колец 5 и 6 вокруг стержня 3. В результате этого направление наклона опорной поверхности основания 2 относительн опорной поверхности основания 1 йзмен1пется, а величина угла наклона (угол ft) остается постоянной. Величина наклона угла основания (этносительно основания 1 определя,ётся по формуле pi 2arc9in ( 0 у), где об - угол, образованный геомётрнческими осями стержня и зубчатого венца; у угол поворота зубчатых венцов относительно друг друга. Величина углов и у определяется по шкалам 19 и 20 соответственно с помощью общей для обоих шкал риски 1В. Штатив обеспечивает достнжение высокой точности юстировки закрепляемого объектива, в частности при значениях ... 60 , 88...90° точность установки прибора достигает десятых долей секунды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| ШВЕЙНАЯ МАШИНА ЗИГ-ЗАГ | 1989 |
|
RU2050425C1 |
| Консольно-поворотный кран | 1985 |
|
SU1403549A1 |
| ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ИСХОДНЫХ ДАННЫХ ПРИ ЗЕНИТНОЙ СТРЕЛЬБЕ | 1925 |
|
SU4656A1 |
| Загрузочный механизм шахтной печи | 1989 |
|
SU1836433A3 |
| УСТРОЙСТВО для УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 1970 |
|
SU268676A1 |
| Стан холодной прокатки труб | 1985 |
|
SU1338910A1 |
| Ручной нож для резки мяса и тому подобного сырья | 1984 |
|
SU1554753A3 |

15
Т2
. L
Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шарловский Ю.В | |||
| Регулировочные устройства приборов и их элементы | |||
| М., Машиностроение, 1976, с | |||
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Штатив | 1976 |
|
SU586501A1 |
