Изобретение относится к устройствам автоматики и может быть использовано в системах числового программного управления металлорежущими станками.
Цифровой интерполятор является одной из наиболее важных частей контурных систем числового программного управления и служит для выработки программы работы станка между опорными точками по заранее заданному закону.
Известны трехкоординатные цифровые линейные интерполяторы, работающие по принципу вычисления оценочных функций и состоящие нз регистров, сумматоров, схем совпадений, блоков определения знаков оценочных функций и счетчика перемещений. В этих устройствах требуется выделение максимальной величины проекции прямой на координаты плоскости, что усложняет программирование.
Целью настоящего изобретения является получеиие схемы трехкоординатного цифрового линейного интерпочлятора, работающего с использованием оценочной функции, без искусственных приемов программирования при сохранении точности отработки.
Для этого первый выход регистра первой координаты через блок схем совпадения первого типа соединен с первым входом третьего сумматора, второй выход регистра первой координаты через блок схем совпадения второго типа
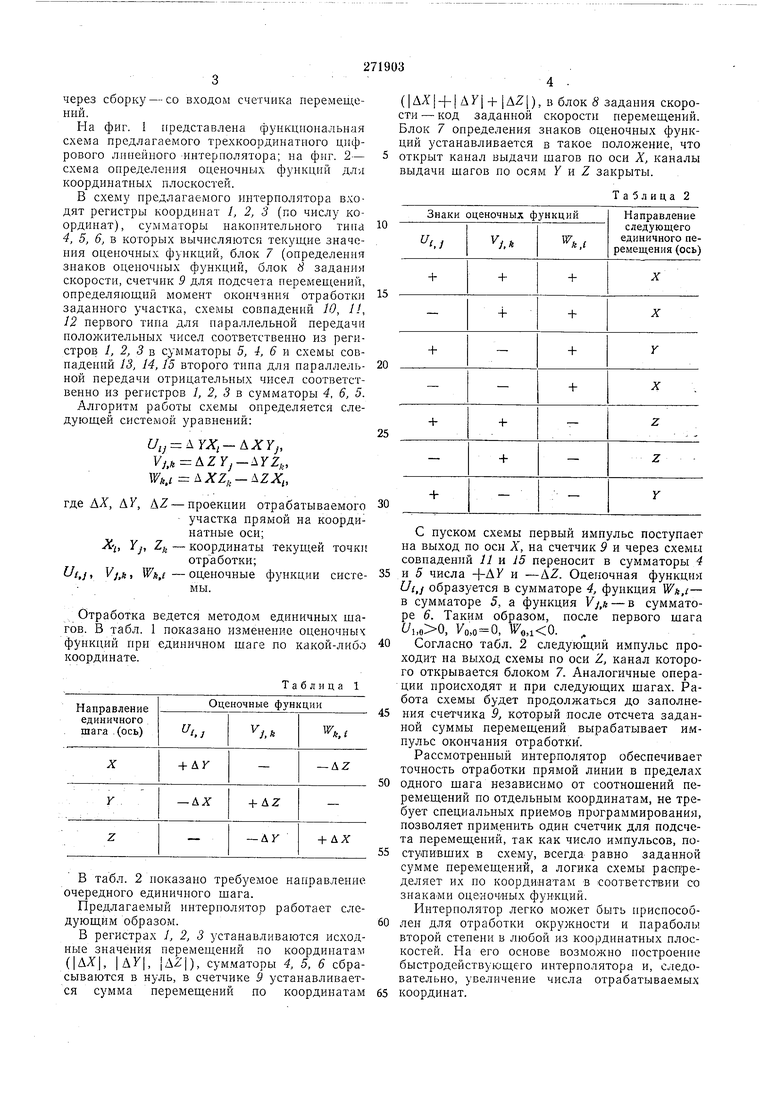
соединен с первым входом первого сумматора, первый выход регистра второй координаты через блок схем совпадения первого типа соединен со вторым входом первого сумматора, второй выход регистра второй координаты через блок схем совпадения второго типа соединен с первым входом второго сумматора, первый выход регистра третьей координаты через блок схем совпадения первого типа соединен со вторым входом второго сумматора, второй выход регистра третьей координаты через блок схем совпадения второго типа соединен со вторым входом третьего сумматора, выходы сумматоров соединены с соответствующими входами блока определения знаков оценочных функций, первый выход блока определения знаков оценочных функций подключен ко входу блока схем совпадения первого типа регистра второй коориднаты и ко входу блока схем совпадения второго типа регистра третьей координаты, второй выход блока определения знаков оценочных функций соединен со входом блока схем совпадений первого типа регистра третьей координаты и со входом блока схем совпадения второго типа регистра первой координаты, третий выход блока определения знаков оценочных функций соединен со входом блока схем совпадений ггервого типа регистра первой координаты, со входом блока схем совпадения второго типа регистра второй координаты и через сборку - со входом счетчика перемещений. На фиг. 1 представлена функциональная схема предлагаемого трехкоординатиого цифрового липейного интерполятора; на фиг. 2- схема определения оценочных функций дл-/1 координатных плоскостей. В схему предлагаемого интерполятора входят регистры координат /, 2, 3 (по числу координат), сумматоры накопительного тина 4, 5, 6, в которых вычисляются текущие значения оценочных функций, блок 7 (определения знаков оценочных функций, блок 8 задания скорости, счетчнк 9 для подсчета перемещений, определяющий момент окончания отработки заданного участка, схемы совнадений 10, II, 12 первого типа для параллельной передачи положительных чисел соответственно из регистров 1, 2, 3 в сумматоры 5, 4, 6 и схемы совиадений 13, 14,15 второго тииа для параллельной передачи отрицательных чисел соответственно из регистров 1, 2, 3 в сумматоры 4, 6, 5. Алгоритм работы схемы определяется следующей системой уравнений: Uij- YXf-/ XYj, V,,, W,,XZ,, где АХ, ДК, AZ - проекции отрабатываемого участка прямой на координатные оси; Xi, Yj, Zf - координаты текущей точк1 отработки; ij .ft . - оценочные функции системы. Отработка ведется методом единичных щагов. В табл. 1 показано изменение оценочных функций при единичном щаге по какой-либо координате. Таблица 1 В табл. 2 показано требуемое направление очередного единичного щага. Предлагаемый интерполятор работает следующим образом. В регистрах J, 2, 3 устанавливаются исходные значения перемещений по координатам (, |АУ|, |AZ|), сумматоры 4, 5, 6 сбрасываются в нуль, в счетчике 9 устанавливается сумма перемещений по координатам I АХ -f-1 Л У j -f j AZI), в блок 8 задания скороти - код заданной скорости перемещений. лок 7 определения знаков оценочных функий устанавливается в такое положение, что ткрыт канал выдачи щагов по оси X, каналы ыдачи щагов по осям У и Z закрыты. Таблица 2 С пуском схемы первый импульс поступает на выход по оси А, на счетчик 9 и через схемы совпадений 11 и 15 переносит в сумматоры 4 и 5 числа -|-АУ и -AZ. Оценочная функция Ui,j образуется в сумматоре 4, функция Wk,i- в сумматоре 5, а функция - в сумматоре 6. Таким образом, после первого щага t/i,, УО,О О, ,. Согласно табл. 2 следующий импульс проходит на выход схемы по оси Z, канал которого открывается блоком 7. Аналогичные операции происходят и при следующих щагах. Работа схемы будет продолжаться до заполнения счетчика 9, который после отсчета заданной суммы перемещений вырабатывает импульс окончания отработки . Рассмотренный интерполятор обеспечивает точность отработки прямой линии в пределах одного щага независимо от соотнощений перемещений по отдельным координатам, не требует специальных приемов программирования, позволяет применить один счетчик для подсчета перемещений, так как число импульсов, поступивщих в схему, всегда равно заданной сумме перемещений, а логика схемы pa-onipeделяет их по координатам в соответствии со знаками оце ночмых фуНКций. Интерполятор легко может быть приспособлен для отработки окружности и параболы второй степени в любой из координатных плоскостей. На его основе возможно построенне быстродействующего интерполятора и, следовательно, увеличение числа отрабатываемых координат.
Предмет изобретения
Трехкоординатный цифровой линейный интерполятор, работающий по принципу вычисления оценочных функций, состоящий из регистров, сумматоров, схем совпадений, блоков определения знаков оценочных функций, счетчика перемещений, отличающийся тем, что, с целью обеспечения простоты программирования, в нем первый выход регистра первой координаты через блок схем совпадения первого типа соединен с первым входом третьего сумматора, второй выход регистра первой координаты через блок схем совпадения второго типа соединен с первым входом первого сумматора, первый выход регистра второй координаты через блок схем совпадения первого типа соединен со вторым входом первого сумматора, вто рой выход регистра второй координаты через блок схем совпадения второго типа соединен с первым входом второго сумматора, первый выход регистра третьей координаты через бло1-: схем совпадения первого типа соединен со вторым входом второго сумматора, второй выход регистра третьей координаты через блок схем совпадения второго типа соединен со вторым входом третьего сумматора, выходы сумматоров соединены с соответствующими входами блока определения знаков оценочных функций, первый выход блока определения знакои оценочных функций подключен ко входу блока схем совпадения первого типа регистра второй координаты и ко входу блока схем совпадения второго типа регистра третьей координаты, второй выход блока определения знакои оценочных функций соединен со входом блока схем совпадеипй первого типа регистра
третьей координаты и со входом блока схем совпадения второго типа регистра первой координаты, третий выход блока определении знаков оценочных функций соединен со входом блока схем совпадений первого типа регистра, первой координаты, со входом блока схем совпадения второго типа регистра второй координаты и через сборку со входом счетчика перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР С ПЕРЕКЛЮЧАЕМОЙЛОГИКОЙ | 1969 |
|
SU256014A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Линейный интерполятор с оценочной функцией | 1975 |
|
SU545972A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |

Vj,fl0
Vj,n-0
U,l 0
A.,yy;
А./гУ
A,( f
n,i 0
fue Z
