Изобретение относится к автоматике и вычислительной технике и предназначено для использования, например , в системах числового программно- го управления станками и другим технологическим оборудованием о
Цель изобретения - упроа;ение устройства и расширение функциональных возможностей путем обеспечения линейной интерполяции
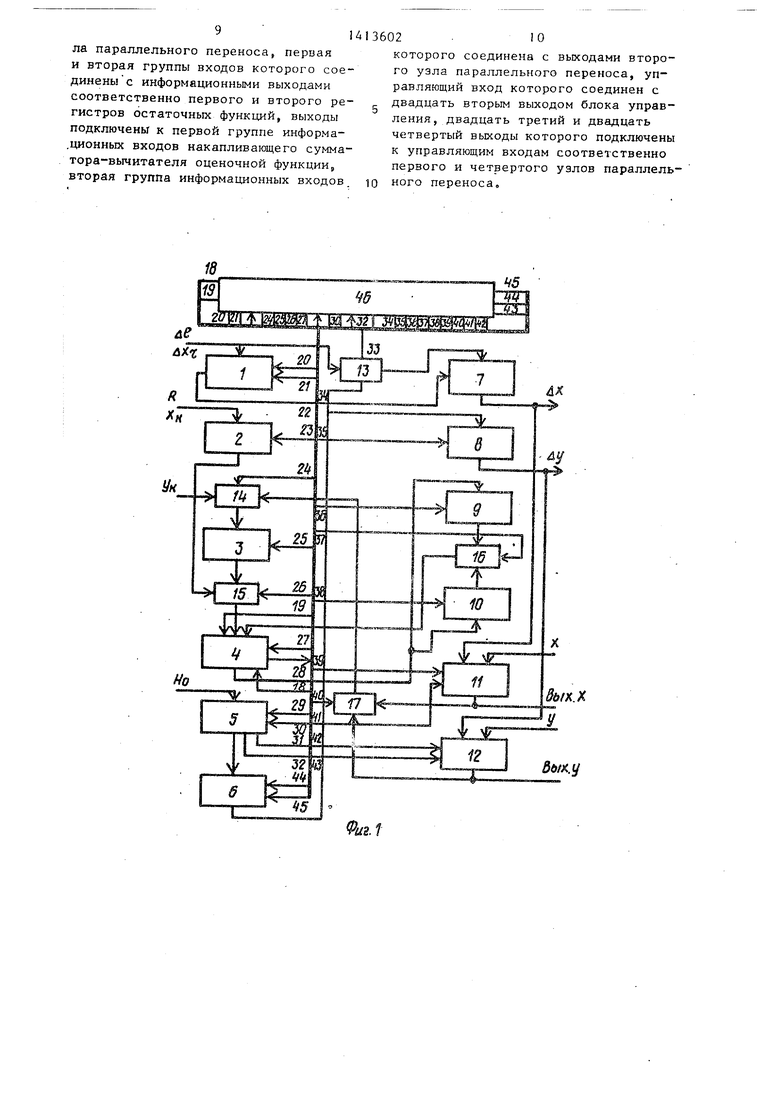
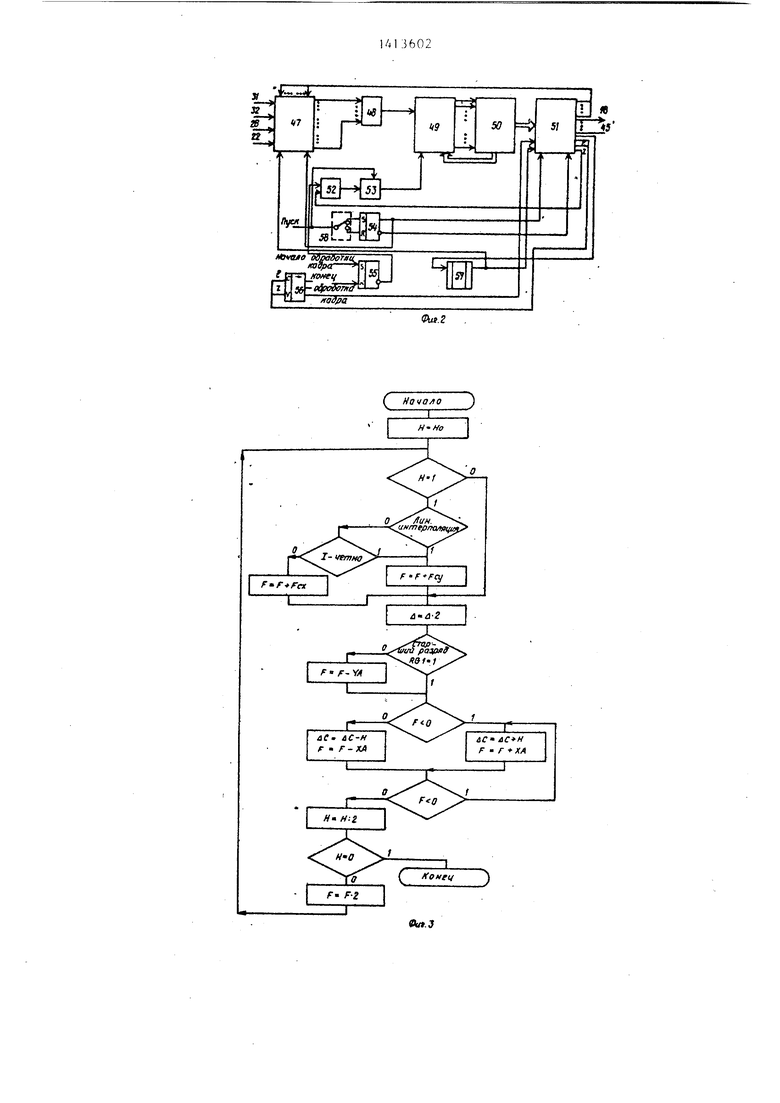
На фиг«1 представлена структурная схема устройства; на фиг, 2 - блок- схема блока управления; на фиг. 3 и 4 - алгоритмы работы устройства и блока управления.
Интерполятор содержит регистр 1 сдвига/приращения, регистр 2 радиуса окружности, регистр 3 координаты конечной точки, накапливающий сумматорвычитатель 4 оценочной функции, регистр 5 сдвига величины шага, накапливающий сумматор 6 приращений,регистры 7 и 8 приращений, регистры 9 и 10 остаточных функций, накапливающие су маторы 1 1 и 2 координат текущей точки узлы (группы) 13-17 параллельного переноса (мультиплексоры на два входа), выходы 18-21, вход 22, выходы 23-27, вход 28, выходы 29,30, входы 31-45 блока 46 управления
Блок 46 управления содержит ( дешифратор 47, элемент ИЛИ 48, блок 49 микропрограммного управления (БМУ), постоянный запоминающий блок 50, дешифратор 51, элемент И 52, генератор 53 тактовых импульсов, RS- триггеры 54 и 55, регистр 56 сдвига, счетчик 57 импульсов и переключатель 58с
Переключатель 58 задает режим работы интерполятора (линейная или кру- годая интерполяция), устанавливая в единичное или нулевое состояние первый RS-триГгер 54 Второй RS-триггер
55служит для фиксации начала или конца отработки кадра В случае наличия сигнала конца отработки кадра (кок) единичный сигнал с инверсного выхода триггера 55 при наличии сиг- нала от дешифратора 51 проходит через элемент И 52 н отключает генератор 53 тактовых импульсов Регистр
56сдвига предназначен для определения момента окончания вычисления приращений ПО осям X и Y (при круговой интерполяции). Счетчик 57 служит для задания порядка чередования вычисления приращений по координатам
В основе работы интерполятора лежит алгоритм линейной интерполяции по методу оценочной функции„ Суть алгоритма () состоит в вычислении оценочной функции F; по вьфаже- ниямг F;- Т;., - YA - sgnF;., ХА, если старший разряд величины (регистр сдвига) равен единице, и F; F;, - sgnF;, ХА - в противном случае, где sgnF;., ef-1; +l| - знак оценочной функции. Величина приращения Н J в каждом цикле уменьшается в два раза и служит для вычисления приращения UC; ЛС;., - sgnF.,H; причем начальное значение Н 2 (г - разрядность регистров приращений).
Возможность использования зтого алгоритма для вычисления приращений окружности основана на следующих соображениях Координаты окружности могут быть получены интегрированием по методу прямоугольников с недостатком и избытком и с чередованием вычислением от шага к щагу (последовательность вычислений X,Y,Y,X):
i-(i i -YibcxL X; - ДХ;/.ч
YU, Y; + Xi, uti Y; + AY;+. Уиг Y.4, -ь Xj,,. Y;, + uYj,
14-г
+ (i+iub -Xj., -uX
ч+г
Из уравнений для определения приращений
V
ДХ Л 1 sincit g- Ы,
UY Л1 cos«6 - Л1, К
Vk где ul г-- .- приращение длины
дуги;
V - контурная скорость; f - постоянная несущая
частота следящего
привода, можно записать оценочные функции:
FX ЕьХ - Y41, FY RuY - Xil,
(2)
позволяющие определить требуемые приращения.
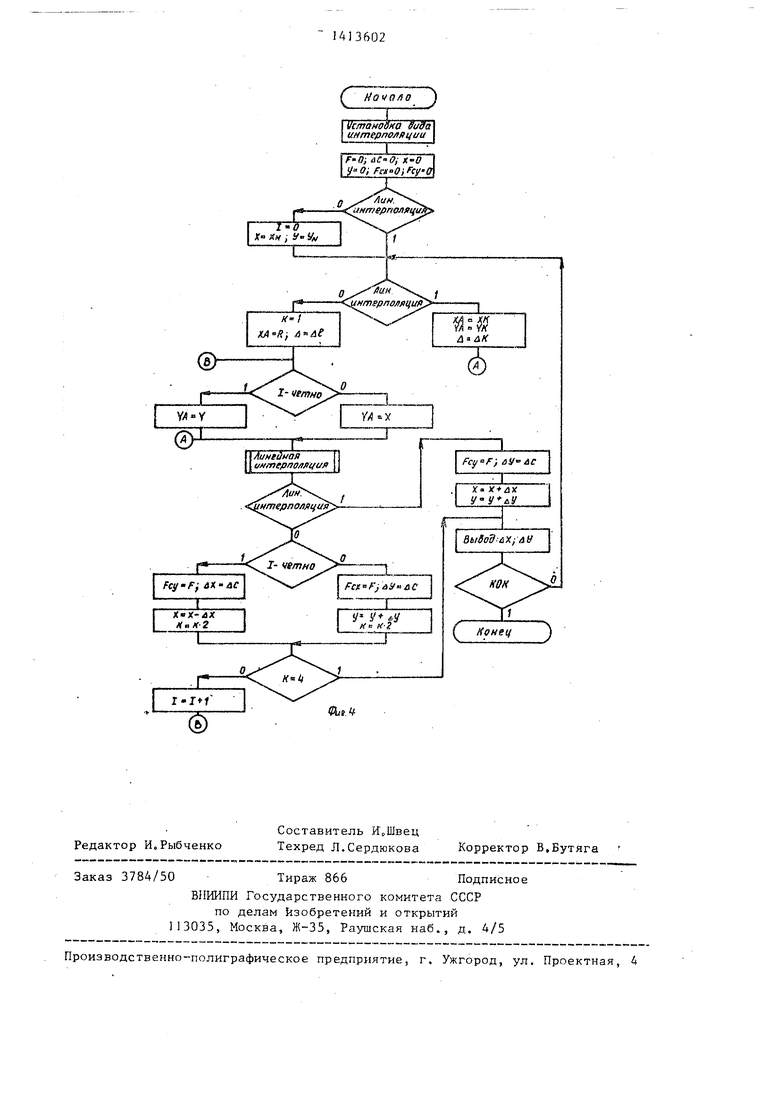
Таким образом, вычислительный процесс круговой интерполяции состоит из последовательности (l), а приращения на каждом шаге определяют по алгоритму линейной интерполяции (), Блок-схема обобщенного алгоритма линейно-круговой интерполяции приведена на фиг.4
31
Устройство работает следующим образом,
В начальный момент времени обнуляются регистры 9 и 10 остаточных функций, сумматоры 11 и 12 координат текущей точки, сумматор 6 приращений и сумматор 4 оценочной функции. Зате в зависимости от вида интерполируемой траектории (линейная или круговая интерполяция) осуществляется занесение соответствующей информации в регистры и сумматоры. Так, в случае линейной интерполяции в регистры 2 и 3 заносятся величины Х и Y (координаты конечной точки прямой), а в регистр 1 сдвига - величина тактового приращения UX-j, которая, проходя через первую группу 13 параллельного переноса, заносится в регистр 7 приращения После этого происходит переход к выполнению микропрограммы линейной интерполяции, В режиме круговой интерполяции в сумматоры 11 и 12 координат текущей точки заносятся значения координат начальной точки окружности Хц и Yj, в регистр I сдвига - величина аппроксимирующей хорды Л1, а в ре- гистр 2 - радиус окружности R Кроме того, устанавливается в единичное состояние регистр 56 сдвига в блоке 46 управления, через четвертую группу 17 параллельного переноса передается либо код величины Y с сумматора 12, либо код величины X с сумматора 11, Код соответствующей величины, проходя через третью группу 14 параллельного переноса, заносится в регистр 3, после чего происходит переход к вьшолнению микропрограммы линейной интерполяции
Рассмотрим работу интерполятора при реализации микропрограммы линейной интерполяциио В регистр 5 сдвига заносится величина начального шага Н и анализируется ряд логических условий Если (сигнал на шине 32), установлен режим круговой интерполяции (триггер 54 в нулевом состоянии) и I .нечетно (младший разряд счетчика 57 равен нулю), то к содержимому сумматора 4 оценочной функции добавляется код остаточной функции из регистра .9, который проходит через пятую группу 16 параллельного Лереноса, если I четно (младший разряд счетчика 57 равен единице), выполняется операция суммирование со2
держимого сумматора 4 оценочной функции и регистра 10„ При равенстве ив случае линейной интерполяции (триггер 54 в единичном состоянии) к содержимому сумматора 4 оценочной функции добавляется код регистра 10. После выполнения указанных операций. либо в случае происходит сдвиг
содержимого регистра 1 сдвига на разряд влево с целью анализа очередной цифры в двоичном представлении величины ДХ или л1о
Если старщий разряд регистра 1
сдвига равен единице (наличие сигнала на щине 22), из содержимого сумматора 4 оценочной функции вычитается код регистра 3, который проходит через вторую группу 15 параллельного переноса а После выполнения зтой операции или при равенстве старшего разряда регистра 1 сдвига нулю анализируется знак сумматора 4 оценочной
функции
Если (отсутствие сигнала на шине 28), выполняются операции вычитания из содержимого сумматора 4 оценочной функции кода регистра 2, проходящего через вторую группу 15 параллельного переноса, и из сумматора 6 приращений - кода регистра 5 сдвига величины шага, В противном случае (F«iO) к сумматорам 4 оценочной функЦии и б приращения подсуммируются указанные величины Затем еще раз осуществляется проверка знака оценочной функции, и при повторно производятся операции суммирования в
сумматорах 4 и 6.
Как только величина оценочной функции станет положительной, происходит переход к новой.итерации, для
чего уменьшается шаг в два раза
(сдвиг содержимого регистра 5 сдвига на разряд вправо) и при Н/0 (отсутствие сигнала на шине 31) F увеличивается в два раза (сдйиг содержимого сумматора 4 оценочной функции на разряд влево), после чего происходит переход в микропрограмме (фиГоЗ) на анализ равенства и повторение перечисленных выше операций Если же после очередного уменьшения величины шага он окажется равным нулю, то вьтолнение микропрограммы определения приращения прямой заканчивается
51
В режиме линейной интерполяции на регистр 10 остаточной функции передается код сумматора 4 оценочной функции, на регистр 8 - код сумматора 6 приращений и происходит подсуммиро- вание кодов регистров 7 и 8 соответственно к сумматорам 11 и 12 координат текущей точки. Таким образом, на выходных шинах формируются очередные рассчитанные величины йХ и дУ, X и Y.
В режиме круговой интерполяции после выполнения микропрограммы расчета приращения осуществляются следующие операции 15сли I четно (млад ший разряд счетчика 57 равен едини- ;це), на регистр 10 остаточной функции передается код сумматора 4 оце- :ночной функции., на регистр 7 - код сумматора 6 приращений, который проходит через первую группу 13 параллельного переноса. Затем происходит вычитание кода регистра 7 из сумматора 1 1 координаты X текущей точки, осуществляется сдвиг слево на разряд единицы в регистре 56 сдвига блока 46 управления В противном случае (I нечетно) на регистр 9 остаточной функции передается код сумматора 4 оценочной функции, на регистр 8 - код сумматора 6 приращений после чего происходит подсуммирова- ние кода регистра 8 к содержимому суматора 12 координаты Y текущей точки и о-существляется сдвиг в регистре 56 сдвига
После сдвига информации в регистре 56 сдвига анализируется состояние его третьего выхода, и, если этот сигнал соответствует нулевому уровню (к 4), в счетчик 57 добавляется единица и происходит переход в микропрограмме (фиго4) для вычисления . Приращения окружности по второй оси координат о Если же на третьем выходе регистра 56 сдвига установлена еди ница ()5 вычисления очередных приращений окружности заканчиваются
После того, как в регистрах 7 и 8 будут сформированы новые значения приращений лХ и uY а в сумматорах II- и 12 - значения текущей координаты, указанные величины передаются на исполнительные механизмы. Затем в зависимости от состояния триггера: 55 в блоке 46 управления работа интерполятора либо заканчивается (если имеется сигнал Конец отработки кад-
2 6
ра), либо осуществляется переход к микропрограмме (фиг е.4) для расчета очередных приращений траектории
(при отсутствии сигнала Конец отработки кадра).
Устройстао 46 управления работает следующим образом
В начальный момент времени (по
сигналу Пуск) запускается генератор 53 и сигналом с его выхода заносится код адреса, по которому определяется первая микрокоманда микропрограммы управления работы интерполятора, которая записана в блоке 50 постоянного запоминающего устройства (ПЗУ). По сигналу Пуск с помощью переключателя 58 фиксируется вид интерполяции и устанавливается
в соответствующее состояние триггер 54 о Кроме того, в начальный момент времени сигналом Начало отработки кадра устанавливается в единичное состояние триггер 55 о После этого
происходит считьшание микрокоманд из ПЗУ 50 и передача их на второй дешифратор 51j который под действием микрокоманды вырабатывает определенную последовательность сигналов; управляющих по щинам 18-45 работой интерполятора, причем для формирования следующего ад.реса микрокоманды используется семиразрядн-ая шина, соединяющая выходы ПЗУ 50 с соответствующими входами управления регистром адреса микрокоманд-в БМУ 49,
Для выработки сигналов условных переходов используется первый дешифратор 47 и элемент РШИ 48 Прохождение сигналов условных переходов через элемент ИЛИ 48 к входу БМУ 49 осуществляется под управлением сигналов обратной -связи бт второго дешифратора 51 Переход от одной микрокоманды к другой в микропрограммах осуществляется через равные промежутки времени, определяемые периодом следования тактовых импульсов от генератора 53 тактовых импульсов,
Сигналом окончания работы устройства является сигнал, поступающий от элемента И 52, который, в свою очередь, формируется при наличии одновременно двух сигналов: от второго дешифратора 5 и с инверсного выхода второго триггера 55, Формула изобретения Интерполятор, содержащий накапли- вающий сумматор-вычитатель оценочной
714
функции, информационные выходы которого подключены к информационньм- входам первого и второго регистров остаточных функций, синхровходы которых соединены соответственно с первым и вторым выходами блока управления, третий, четвертый и пятый выходы ко- торЬго подключены соответственно к первому и второму управляющим входам и входу синхронизации накапливающего сумматора-вычитателя оценочной функции, выход старшего разряда которого соединен с первым входом блока управления, шестой и седьмой выходы которого соединены соответственно с входом синхронизации и управляющим входом регистра величины шага, информационные входы которого подключены к шине ввода величины начального шага, а информационные выходы соединены с информационными входами накапливающего сумматора приращений, выходы двух младших разрядов подключены соответственно к второму и третьему входам блока управления, восьмой и девятый выходы которого соединены соответственно с входом синхронизации и управляющим входом накапливающего сумматора приращений, десятый и одиннадцатый выходы подключены соответственно к входу синхронизации и -управляющему входу первого накапливающего сумматора координаты текущей точки, первая группа информационных входов соединена с шиной ввода величины X, информационные выходы подключены к выходной шине величины X, причем двенадцатый и тринадцатый выходы блока управления соединены соответственно с входом синхронизации и управляющим входом второго накапливающего сумматора координаты текущей точки, первая группа информационных входов которого соединена с шиной ввода величины У, информационные выходы подключены к выходной шине величины У, о т л и - чающийс я тем, что,, с целью упрощения и расширения функциональных возможностей путем обеспечения линейной интерполяции, в него введены первый, второй и третий регистры приращений, регистр координаты конечной точки, регистр радиуса окружности, первый, второй, третий, четвертый- и пятый узлы параллельного переноса, причем шина ввода величины Д1 (ЛХ) подключена к соединенным меж2
ду собой первой группе входов первого узла параллельного переноса и информационным входам первого регистра приращения, выход старшего разряда которого соединен с четвертым входом блока управления, четырнадцатый и пятнадцатый выходы которого подключены -соответственно к входу синхронизации и входу управления первого регистра приращения, шина ввода величины R подключена к информационным входам регистра радиуса окружности, синхро- вход которого соединен с шестнадцатым выходом блока управления, информационные выходы подключены к первой группе входов второго узла параллель- ного переноса, Бторая группа входов которого соединена с информационньми
выходами регистра координаты конечной точки, вход информации которого соединен с семнадцатым выходом блока управления, информационные входы подключены к выходам третьего узла па
раллельного переноса, первая группа входов которого соединена с шиной ввода величины У, управляющий вход подключен к восемнадцатому выходу блока управления, вторая группа вхоДов соединена с соответствующими выходами четвертого узла параллельного переноса, первая и вторая группы входов которого подключены к информационным входам соответственно первого и второго накапливающих сумматоров координаты текущей точки, вторые группы информационных входов которых подключены к объединенным между бой соответственно выходной шине величины ДХ и информационным выходам второго регистра приращения, выходной шине величины ЛУ и информационным выходам третьего регистра прира- I - .-.
щения, при этом информационные входы второго регистра приращения подключены к выходам первого узла параллельного переноса, вторая группа I
входов которого подключена к объединенным между собой информационным выходам накапливающего суммато.ра приращений и информационным входам
третьего регистра приращения, синхро- вход которого соединен с девятнадца- тым выходом блока управления, двенадцатый выход которого подключен к синхровходу второго регистра приращения, двадцать первый выход подключен к управлякщему входу з
у14
ла параллельного переноса,, первая и вторая группы входов которого соединены с информационными выходами соответственно первого и второго регистров остаточньпс функций, выходы подключены к первой группе информа- .ционных входов накапливающего сумма- тора-вычитателя оценочной функции, вторая группа информационных входов.
13602 0
которого соединена с выходами второго узла параллельного переноса, управляющий вход которого соединен с
двадцать вторым выходом блока управ- 5„
ления, двадцать третий и двадцать
четвертый выходы которого подключены к управляющим входам соответственно первого и четвертого узлов параллель- КЗ ного переноса.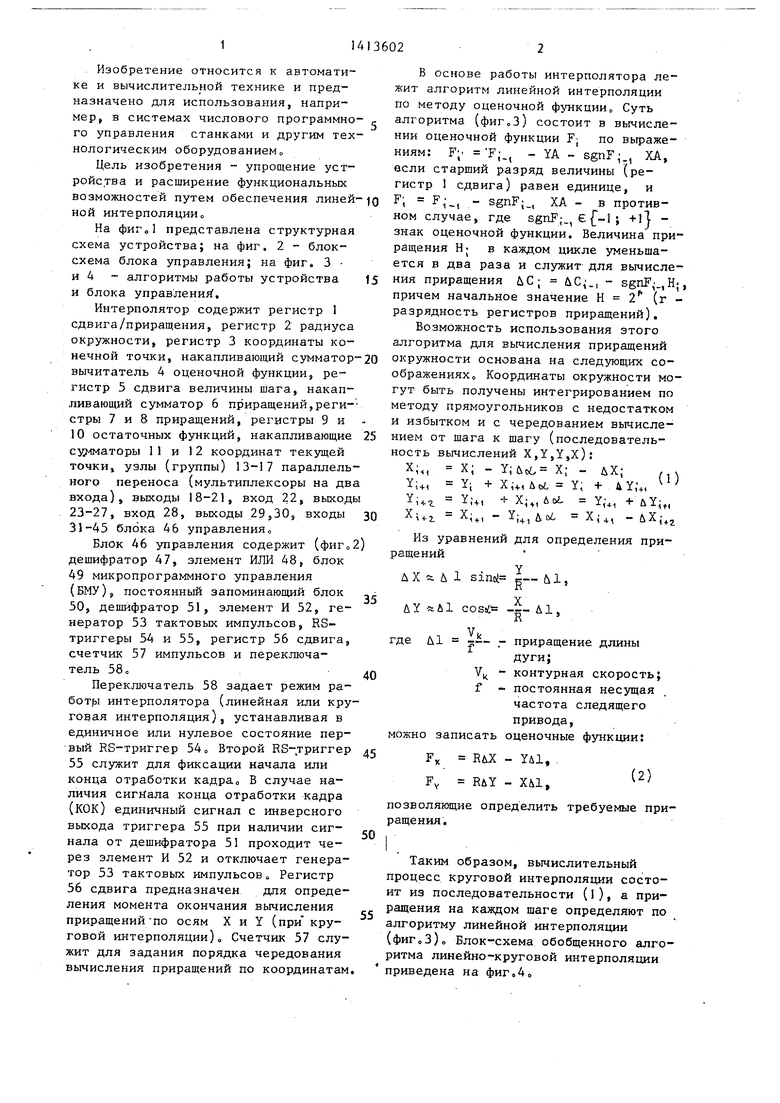
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1988 |
|
SU1541557A1 |
| Круговой интерполятор | 1982 |
|
SU1081623A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками и технологическими процессами Целью изобретения является упрощение интерполятора и расширение его функциональных возможностей за счет линейной интерполяции. Поставленная цель достигается тем, что в интерполятор, содержащий накапливающий сум- матор-вычитатель оценочной функции, два регистра остаточных функций, блок управления, регистр координаты конечной точки, регистр величины шага, шину ввода величины начального шага, накапливающий сумматор приращений, два накапливающих сумматора координаты конечной точки, шины ввода величин X и Y, введены три регистра приращений, регистр координаты конечной точки, регистр радиуса окружности, пять узлов параллельного переноса и соответствующие связи. 4 ил. § (/)
ле
Вык.к
бш.у
X ,iP
зг
«
tt
.
( Начало
( Хонеу 
| Бреслав ИоЗ | |||
| и др | |||
| Структура и точность кругового интерполятора с большим шагом интерполяции - Станки с числовым программным управлением, участки и автоматические линии на их основе | |||
| М,: МДНТП, 1974, с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Круговой интерполятор | 1982 |
|
SU1081623A1 |
