со со
сд
tfklf.l
113
Изобретение относится к машино- строению, а именно к захватам манипуляторов, предназначенным для механизации и автоматизации основных и вспомогательных операций.
Цель изобретения - расширение технологических возможностей захвата манипулятора за счет обеспечения переориентации зажатой детали и фикса- ции ее в крайних положениях.
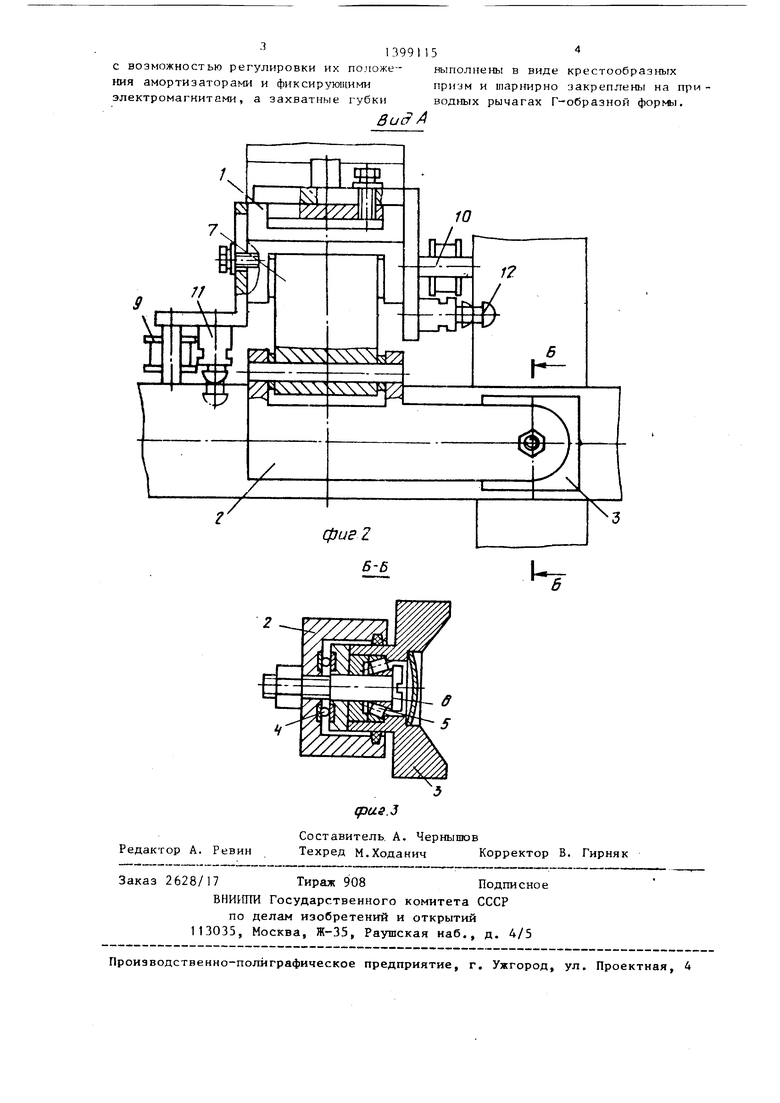
На фиг. 1 изображен захват манипулятора; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Захват манипулятора содержит корпус 1, Г-образные губки 2 с расположенными на них вращаю1цимися крестообразными зажимными призмами 3, установленными на упорные подшипники А и закрепленными на радиально-упор- ных подшипниках 5, посаженных ia оси 6, закрепленными в губках 2 зах- вата. Механизмь 7 параллелограмма связаны с приводом 8 линейного переме- щения, а электромагниты 9 и 10 установлены с возможностью регулировки их положения в зависимости от типоразмера детали. Амортизаторы 11 и 12 установлены также с возможностью регулировки их положения в зависимости от типоразмера захватываемой детали .
Захват манипулятора работает следующим образом.
При захвате горизонтально расположенной детали, не требующей переориентации в вертикальное положение, захват детали производится за центр тяжести детали. Для удержания детали в горизонтальном положении включается электромагнит 9, удерживающий от опрокидывания левый конец детали. При смещении центра тяжести вправо от центра зажимных призм 3 включения электромагнита 9 не требуется. При захвате горизонтально расположенной детали, требующей переориентации по ходу технологического процесса в вертикальное положение, захват производится со смещением центра зажимных призм 3 вправо от центра тяжести детали с одновременным.включением злектромагнита 9. Для переориента- ции детали электромагнит 9 отключается и деталь под действием силы тяжести проворачивается вместе с призмами 3 относительно губок на
2
подщипниках 4 и 5, установленных на оси 6, против часовой стрелки и занимает вертикальное положение, взаимодействуя с амортизатором 12, гасящим ударную нагрузку, и электромагнитом 10, служащим жестким упором, исключающим возможные колебания детали при переносе ее рукой робота (при его включении) и фиксирующим деталь в вертикальном положении.
При захвате вертикально расположенной детали не требующей переориентации, захват детали производится либо за центр тяжести, либо выше центра тяжести с одновременным включением электромагнита 10, служащего д.ая удержания детали в вертикальном положении, а амортизатор 12 отжимается деталью влево.
При захвате вертикально расположенной детали, требующей переориентации, захват производится ниже центра тяжести детали с одновременным вклю че1шем электромагнита 10 для удержания детали в вертикальном положении. Дпя переориентации детали электромагнит 10 отключается, амортизатор 12, возвращаясь в исходное положение, смещает центр тяжести детали с вертикальной оси, что приводит к опроки- №1ванию детали по часовой стрелке и переводу ее в горизонтальное положение. Амортизатор 11, взаимодействуя с нижним концом детали, провер- нувщимся по часовой стрелке относительно центра зажимных призм, отжимается вверх до тех пор, пока деталь не упрется в электромагнит 9, включение которого производится лишь при необходимости исключения возможных колебаний детали при ее переносе.
При разжиме захвата (независимо от пространственной ориентации зажатой детали) электромагниты обесточиваются .
Формула изобретения
Захват манипулятора, содержаний корпус и рычаги, кинематически связанные с корпусом и являющиеся звеном параллелограммного механизма, боковые звенья которого связаны с приводом, и захватные губки, установленные на рычагах, отличающийся тем, что, с целью расщи- рения тех нологических возможностей, он снабжен установленными на корпусе
1399115
с возможностью регулировки их положе- выполнены в виде крестообразных ния амортизаторами и фиксирующимипризм и шарнирно закреплены на при
электромагнитами, а захватные губкиводных рычагах Г-образной .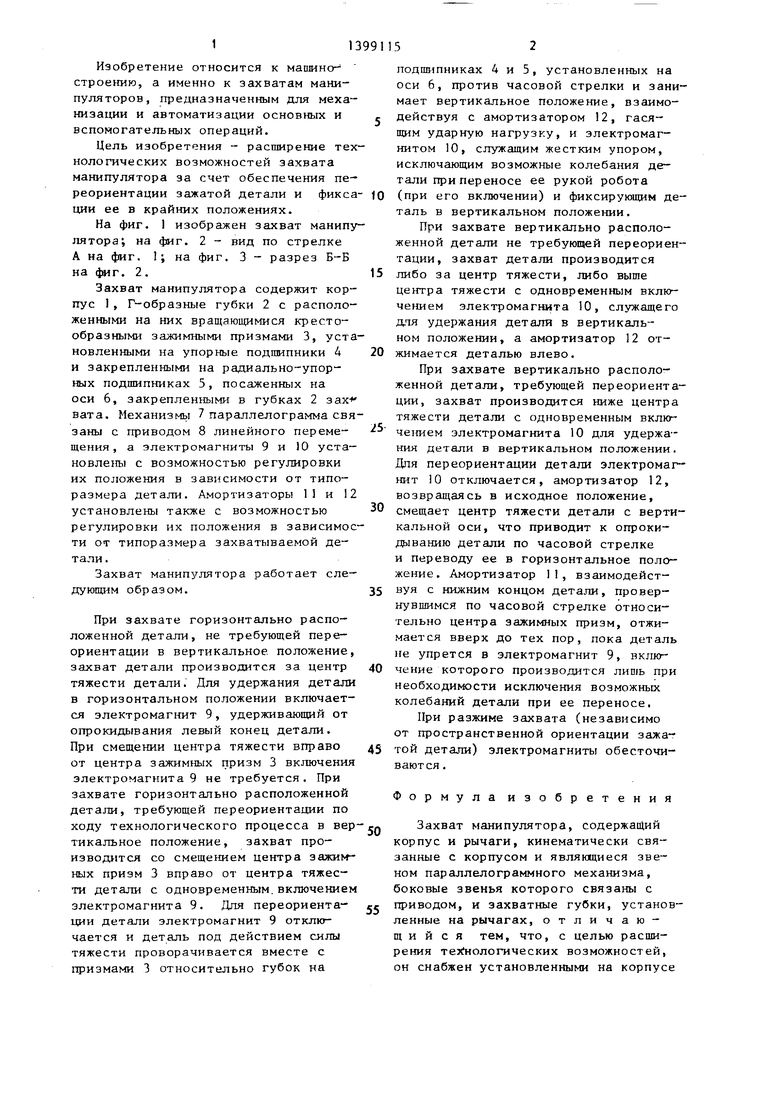
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU547336A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1987 |
|
SU1473944A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Захват промышленного робота | 1980 |
|
SU931468A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Схват | 1981 |
|
SU1013201A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
Изобретение относится к области машиностроения, а именно к захватньж органам манипуляторов. Целью изобретения является расширение технологических возможностей за счет обеспечения переориентации зажатой детали и ({иксации ее в крайних положениях. Захват состоит из корпуса 1, Г-образ- ных губок 2, связанных с корпусом посредством параллелограммных механизмов 7, кинематически связанных с приводом 8 линейного перемещения. .На Г-образных губках 2 шарнирно установлены вравцакяциеся крестообразные зажимные призкы 3. На корпусе захвата установлены с возможностью регулировки их положения электромагниты 10 и амортизаторы 12. Захват детали производится со смещением ее центра тяжести относительно оси зажимных призм 3. В таком положении деталь удерживается электромагнитом 10.Для переориентации детали электромагнит Ю обесточивается и деталь под дейст- ствием возникаиощего момента поворачивается, занимая положение, перпендикулярное исходному. 3 ил. (Л
виа А
| Схват промышленного робота | 1979 |
|
SU812564A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
