(54) СИСТЕМА РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОС
| название | год | авторы | номер документа |
|---|---|---|---|
| Группа универсальных клетей для непрерывной прокати полос с регулятором внутреклетевого натяжения | 1978 |
|
SU863036A1 |
| Способ получения минимальных натяжений полосы | 1981 |
|
SU1044364A1 |
| Устройство для регулирования толщины полосы | 1975 |
|
SU749478A1 |
| Устройство для автоматического управления скоростью задающей клети при периодической прокатке | 1985 |
|
SU1284631A1 |
| Устройство для управления межклетьевым охлаждением полосы на широкополосном стане горячей прокатки | 1980 |
|
SU876231A1 |
| Устройство для измерения межклетевых натяжений проката | 1982 |
|
SU1039600A1 |
| Система стабилизации размеров проката | 1985 |
|
SU1271601A1 |
| Регулятор температуры полосы на выходе из чистовой группы непрерывного стана горячей прокатки | 1975 |
|
SU564026A1 |
| Система автоматического регулирования натяжения и размеров полосы | 1983 |
|
SU1097403A1 |
| Устройство для управления летучими ножницами | 1976 |
|
SU733888A1 |
Изобретение относится к устройствам контроля и регулирования техноглогических параметров непрерывной прокатки и может быть использовано в черновых непрерывных группах клетей широкополосных станов горячей прокатки.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемой является система, содержащая датчик наличия проката в валках, первый тахогенератор, первый регулятор скорости, двигатели привода вертикальных-валков, в каждои горизонтальной клети второй тахогенератор,.второй регулятор скорости, двигатель привода горизонтальных валков,-датчики давления металла на валки, второй датчик наличия проката в валках, датчики горизонтальных сил, решающий блотс, блок умножения, сумматор, блок вычисления, логический элемент, индикатор натяжения и формируюг дий блок, причем вход первого регулятора скорости соединен с первым тахогенератором, а выход первого регулятора скорости соединен с двигателем привода вертикаль- . ных Всшков, вход второго регулятора
скорости соединен с вторым тахогенератором, выход второго р.егулятора скорости соединен с двигателем при|вОда горизонтальных валков, вход вто-. рого датчика наличия проката в валках соединен с выходами датчиков давления металла на валки, входы решающего блока соединены с выходами датчиков давления металла на валки и
10 выходами датчиков горизонтальных сил, вход блока вычисления соединен с выходом блока вычисления в последующей клети, входы логического элемента соединены с выходог блока вычис15ления и с выходами датчиков наличия проката в горизонтальныхвалках данной клети и в горизонтальных валках предыдущей клети, а выход логического элемента соединен с входом
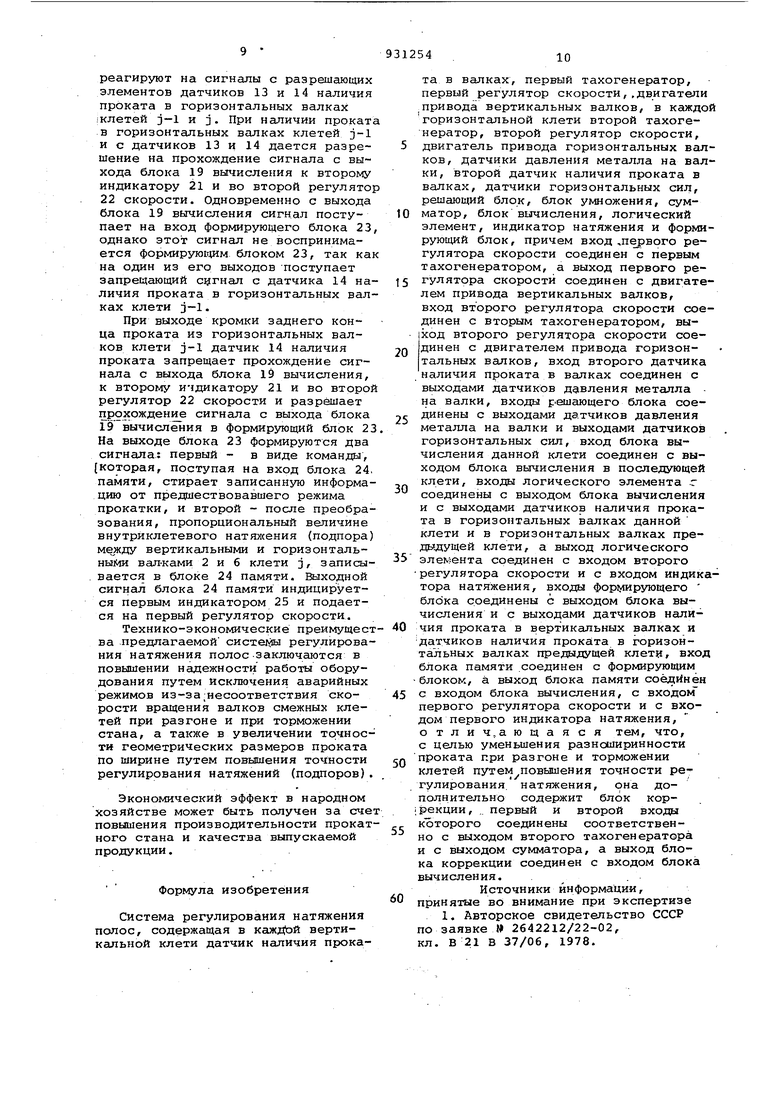
20 второго регулятора скорости и с входом индикатора натяжения, входы фор-, мируюцего блока соединены с выходом блока вычисления и с выходами датчиков наличия проката в вертикаль25ных валках и датчиков наличия проката в горизонтальных валках предыдущей клети, вход блока памяти соединен с формирующим блоком, а блока памяти соединен с входом бло30ка вычисления, с входом первого, регулятора скорости и с,входом первого индикатора натяжения l . Недостатком известного устройства регулирования является то, что в нем в условияхразгона и торможения груп пы клетей при прокатке не учитывает.ся действие динамической составляющей горизонтальных сил, возникающей при ускорении горизонтальных валков клети (кварто), которая при разгоне дополнительно нагружает датчики горизонтальных сил и разгружает их при торможении. Это снижает точность регулирования натяжения (подпора) и приводит к разноширинности проката, поступающего в группу клетей, а еледовательно, и кразноширинности готовой полосы. изобретения - уменьшение раз ноширинности проката при разгоне и торможении клетей путем повышения i точности регулирования межклетевых натяжений (подпоров). Указанная цель достигается тем, что система регулирования, содержаща в каждой вертикальной ; клети датчик наличия проката в валках, первый тахогенератор, первый регулятор скорос ти, двигатели привода вертикальных валков, в каждой горизонтальной клети второй тахогенератор, второй регулятор скорости, двигатель привода горизонтальных валков,..датчики давления металла на валки, второй датчик наличия проката в валках, датчики горизонтальных сил, решающий блок блок умножения, сумматор, блок вычисления , логический элемент, индика тор натяжения и. формирующий блок, пр чем вход первого регулятора скорости соединен с первым тахогенератором, а выход первого регулятора скорости соединен с двигателем привода вертикальных валков, вход второго регулятора скорости, соединен с вторым та Хогенератором, выход второго регуля тора скорости соединен с двигателем привода горизонтальных валков, вход второго датчика наличия проката в валках соединен с выходами датчиков давления металла на валки, входы решающего блока, соединены с выходами датчиков давления металла на валки выходами датчиков горизонтальных сил вход блока вычисления данной клети соединен с выходом блока вычи.сления в последующей клети, входы логическо , го элемента соединены с выходом блок вычисления и с выходами датчиков . наличия проката в.горизонтальных вал ках предыдущей клети, а выход логического элемента соединен с входом второго регулятора скорости и с входом индикатора натяжерия, входы фор мирующегр блока соединены с выходом блока вычисления и с выходами датчиков наличия проката в вертикальных валках и датчиков наличия проката в горизонтальных валках предыдущей клети,вход блока памяти соединен с формирующим(блоком, а выход блока; памяти соедмнен с входом блока вычисления/ с входом первого регулятора скорости и с входом первого индикатора натяжения, дополнительно содержит блок коррекции, первый и входы которого соединены соответственно с выходом второго тахогенератора и с выходом сумматора, а выход блока коррекции соединен с входом блока вычисления. На фиг.1 изображена блок-схема предлагаемой системы регулирования натяжения в непрерывной группе, сое-, тоящей из двух универсальньтх клетей j и J-1; на фиг.2 - электрическая схема блока коррекции. Система регулирования содержит двигатель 1 привода вертикальных валков 2, первый тахогенератор 3, механически связанный с валом двигателя 1, первый регулятор 4 скорости, вход которого соединен с первым тахогенератором 3, а выход соединение двигателем 1, датчик 5 наличия проката в вертикальных валках 2, вход которого соединен с двигателем 1, рабочие валки б, опорные валки 7 горизонтальной клети, двигатель 8 привода рабочих валков 6, второй тахогенератор 9, механически связанный с валом двигателя 8, датчики 10 давления металла на валки клети j и датчики 11 давления металла на валки клети j-1, датчики 12 горизонтальных сил, датчик 13 наличия проката в горизонтальных валках клети j, вход которого связан с датчиками 10 давления металла на валки клети j, датчик 14 наличия проката в горизонтальных . валках клети j-1, вход которого связан с датчиками 11 давления металла на валки клети j-1. Система также содержит решающий блок 15, входы которого соединены с датчиками 10 давления металла на валки и датчиками 12 горизонтальных сил, блок 16 умножения, входа которого соединены с выходом решающего блока 15 и датчи Ко1ми 10 давления металла на валки клети j, сумматор 17, входы которого соединены с блоком 16 умножения и датчиками 12 горизонтальных сил, блок 18 коррекции, входы которого соединены с выходом сумматора 17 и вторым тахогенератором 9, блок 19 вычисления, входы которого соединены с выходом блока 18 коррекции и выходом блока вычисления в последующей горизонтальной клети (не показан), логический элемент 20, входы которо го соединены о выходом блока 19
вычисления и датчиками 13 и 14 наличия проката в горизонтальных валках клетей j Hj-l соответственно,: а выход подключен к второму индикатору 21 натяжения (подпора), второй регулятор 22 скорости, входы которого соединены с вторым тахогенератором 9, выходом логического элемента 20, а выход регулятора 22 скорости подключен к двигателю 8 привода рабочих валков 6 горизонтальной клети J, формирующий блок 23, входы которого соединены с датчиком 5 наличия проката в вертикальных валках 2 клети j, датчиком 14 наличия проката в горизонтальных валках клети J-1 и с выходом блока 19 вычисления, блок 24 памяти, вход которого соединен с выходом формирующего блока 23, а выхода подключены на вход первого регулятора 4 скорости, блока 19 вычисления и к первому индикатору 25 натяжения.
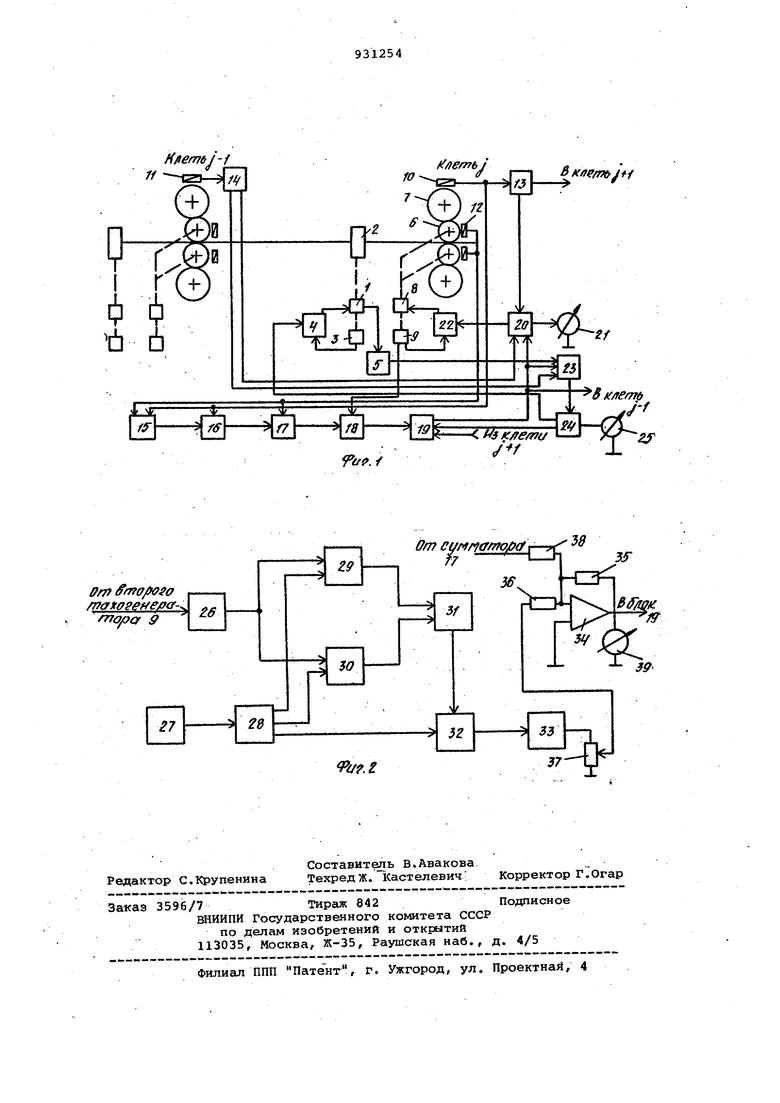
Структура блока 18 коррекции включает преобразователь 26 аналогчастота, вход которого подключен к второму тахогенератору 9, генератор 27, регистр 28 сдвига, вход которо(го подключен к выходу генератора 27, |первый ключ 29 и второй ключ 30, имешие общий вход, соединенный с выкодом преобразователя 26 аналогчастота, и раздельные входы, причем раздельный вход первого ключа 29 соединен с первым выходом регистра 2 сдвига, а раздельный вход второго , ключа 30 соединен с вторым выходом регистра 28 сдвига, реверсивный счетчик 31, входы которого соединены с выходом первого ключа 29 и второго ключа 30, регистр 32 памяти, входы которого соединены с выходом реверсивного счетчика 31 и с третьим выходом регистра 28 сдвига, цифроаналоговый преобразователь 33, вход которого соединен с выходом регистра 32 памяти, операционный усилитель 34 . с резистором 35 в цепи обратной связи, первый вход которого соединен через постоянный резистор 36 и переменный резистор 37 с выходом цифроаналогового преобразователя 33, а второй вход через постоянный резисто 38 соединен с выходом сулвматора 17, выход операционного усилителя 34. соединен с входом блока 19 вычисления и с входом нуль-органа 39.
Клеть J-1 имеет состав оборудования аналогичный клети j.
Система регулирования натяжения полос работает в двух режимах: тарировки, проводимой без металла в валках, ипрокатки.
Для проведения тарировки включают в работу двигатель 8 привода рабочих валков, затем по показаниям второго тахогенератора 9 устанавливают скорость вращения двигателя 8, а по показаниям датчиков 10 давления металла на валки - давление прижатия валков друг к другу, соответствующие, например, рабочей скорости-и рабочему давлению прокатки в клети
J.
При этом на выходах датчиков 10 давления металла на валки и датчико 12 горизонтальных сил появляются калибрующие сигналы, пропорциональные соответственно вертикальным И горизонтальным силам, действующим в рабчих валках горизонтальной клети j. Сигналы с датчиков 10 давления металла на валки и датчиков 12 горизо тальных сил поступают на входы решащего блока 15, который осуществляет операцию деления входных сигналов друг на друга и формирование первог тарировочного сигнала, который в те чение всего межтарироврчного срока запоминается в решающем блоке. 15.
Далее формируют второй тарировочный сигнал, для этого замыкают тумблер во втором регуляторе 22 скорост (не показан) и задают постоянный темп ускорения валков клети j.
. С второго тахогенератора 9 возрастающее напряжение постоянного тока при этом поступает на вход преобразователя 26 аналог-частота (фиг.2), который преобразует напряжение постоянного тока в импульсы, причем чём больше скорость вращения валков клети, тем выше частота следования импульсов на его выходе и наоборот. Импульсы с выхода преобразова.теля 26 аналог-частота поступают одновременно на вход первого ключа 29 и на вход; второго ключа 30 Прохождением импульсов с входа ключей 29 и 30 на их выход управляет регистр 28 сдвига в следующей последовательности: в моменты включения в работу системы с выхода, генератора 27, имеющего постоянную низкую частоту колебаний, например 5 Гц, на вход регистра 28 сдвига поступаютИмпульсы. При поступлении .первого импульса на первом выходе регистра 28 сдвига появляется команда Разрешение, которая проходит на раздельный вход первого ключа 2-9, открывая его, и разрешает прохождение импульсов с выхода преобразователя 26 аналог-частота на первый (прямой) вход реверсивного счетчика 31. В это время на втором и третьем выходах регистра 28 слви-. га появляются команды Запрета, которые запрещают работу второго ключа 30 и регистра 32 памяти.
При поступлении с выхода .генера-. тора 27 на вход регистра 28 сдвига второго импульса на первом выхо- де регистра 28 сдвига появляется команда Запрета, которая эакрйвает первый ключ 29 и запрещает прохождение импульсов с выхода преобразователя26 аналог-частота в счет чик 31. При этом в счетчик 31 записывается число импульсов, пропорциональное скорости вращения валков клети. На втором выходе регистра 28 сдвига появляется команда Разрешение, которая открывает вто рой ключ 30, разрешая прохождение импульсов с выхода преобразователя 26 аналог-частота на второй (реверсивный) вход счетчика 31. На третье выходе регистра 28 памяти в это вре мя по-прежнему появляется команда Запрета.С приходом на вход регист ра 28 памяти третьего импульса на первом и на втором выходах регистра 28 памяти доявляются команды Запрета, кбторые запрещают работу как первого ключа 29, так и второго ключа 30, а на третьем выходе perjftCTpa 28 памяти появляется команда Разрешение, которая разре шает работу регистра 32 Пс1мяти.. За время паузы между первым и третьим импульсами с выхода генератора 27 в реверсивном счетчике 3,1 записывается число импульсов, равное разности числа импульсов, записанных за время паузы между первым и вторым и между вторым и третьим и пульсами, поступившими с выхода генератора 27 на вход регистра 28 сдв га. Число импульсов, поступившее в счетчик 31 и записанное в нем в виде кодового сигнала, пропорциональн изменению скорости, а следовательно ускорению вращения валков клети. Команда Разрешение с третьего выхода регистра 28 сдвига переписыв ет кодовый сигнал с выхода счетчика 31 в регистр 32 памяти. С приходом на вход егистра 28 сдвига четвертого импульса цикл работы ключей 29 и 30, счетчика 31 и регистра 32 памяти повторяется. С регистра 32 памяти кодовый сигнал поступает на вход цифроанало гового преобразователя 33, на выходе которого формируется напряжение постоянного тока, пропорциональное величине ускорения вращениявалков клети, которое подается на перемен ный резистор 37 с движка резистора 37, напряжение через резистор 36 (Поступает на первый вход операцион iHoro усилителя 34. Одновременно с этим на второй вход операционного усилителя 34 через резистор 38 поступает сигнал с выхода сумматора 17. На выходе операционного усилителя 34 формируется сигнал постоян ного тока, который поступает-на нул орган 39, выполненный, например, в виде стрелочного индикатора напряжения. Перемещением движка переменного резистора 37 производится формирование второго тарировочного сигнала, для этого на нуль-органе 39 устанавливают нулевое показание, компенсируя.- тем самым в показаниях датчиков 12 динамическую составляющую горизонталыйлх сил. Величина перемещения движка должна оставаться неизменной до следующей тарировки. После этого тарировка системы регулирования натяжения полос заканчивается и все механизмы прокатной клети возвращаются в исходное положение. В режиме непрерывной прокатки металла валками клети j на один вход блока 16 умножения поступает сигнал с датчиков 10 давления металла на валки, где умножается на первый тарировочный сигнсШ, который поступает с выхода решающего блока 15 на другой вход блока 16 умножения. На выхрдё блока 16 умножения формируется сигН 1Л, пропорциональный давлению металла на валки, 1который, поступая на вход сумматора 17 складывается с другим входным сигналом, поступающим с датчиков 12 горизонтсшьных сил. Выходной сигнсШ сумматора 17 поступает на вход блока 18 коррекции, где корректируется сигналом с второго тахогенератора 9, который пропорционален величине ускорения валков клети j при прокатке. Выходной сигнал блока 18 коррекции поступает на вход блока 19 вычисления натяжения (подлора) . На другие входы блока 19 вычисления поступают сигнсШ с выхода блока вычисления в последующей клети (не показан), величина которого пропорциональна натяжению (подпору) между клетями j,j+l, и сигнал с выхода блока 24 памяти, величина которого пропорциональна внутриклетевому натяжению (подпору) между вертикальными и горизонтальными валками 2 и б клети j. Блок 19 вычисления в трех выходных цепях формирует сигнал, пропорциональный заднему натяжению (под- . пору) клети j. Один из выходных сигналов блока 19 вычисления подается на вход блока вычисления в пре,дыдущей J-1 клети, а два других формируются в сигнал натяжения (подпора) между клетями j-1, если прокат находится одновременно в клетях j-1, j, или, начиная с момента выхода кромки заднего конца проката из предыдущей j-1 клети до момента йхода ее в вертикальные валки 2 клети j, в сигналы внутриклетевого натяжения (подпора) между вертикальными 2 и горизонтальными валками б клети j. Для этого сигнал с выхода блока 19 вычисления подается., на вход логического элемента 20, два других входа которого реагируют на сигналы с разрешающих элементов датчиков 13 и 14 наличия проката в горизонтальных валках 1клетей J-1 и j. При наличии прокат в горизонтальных валках клетей j-1 и с датчиков 13 и 14 дается разрешение на прохождение сигнала с выхода блока 19 вычисления к второму индикатору 21 и во второй регулято 22 скорости. Одновременно с выхода блока 19 вычисления сигнал поступает на вход формирующего блока 23 однако этот сигнал не воспринимается формирующим блоком 23, так ка на один из его выходов поступает запрещающий сугнал с датчика 14 на личия проката в горизонтальных вал ках клети j-1. При выходе кромки заднего конца проката из горизонтальных валков клети j-1 датчик 14 наличия проката запрещает прохождение сигнала с выхода блока 19 вычисления, к второму ичдикатору 21 и во второ регулятор 22 скорости и разрешает прохождение сигнала с выхода блока 19 вычисления в формирующий блок 2 На выходе блока 23 формируются два сигнала: первый - в виде команды, (которая, поступая на вход блока 24 памяти, стирает записанную информацию от предшествовавшего режима прокатки, и второй - после преобразования, пропорциональный величине внутриклетевого натяжения (подпора) между вертикальными и горизонтальНЫ11Ш вал-ками 2 и б клети j, записы. вается в блоке 24 памяти. Выходной сигнал блока 24 памяти индицируется первым индикатором 25 и подается на первый регулятор скорости. Технико-экономические преимущест ва предлагаемой системы регулирования натяжения полос заключаются в повышении надежности работы оборудования путем Исключения аварийных режимов из-за;несоответствия скорости вращения валков смежных клетей при разгоне и при торможении стана, а в увеличении точности геометрических размеров проката по ширине путем повышения точности регулирования натяжений (подпоров). Экономический эффект в народном хозяйстве может быть получен за сче повышения производительности прокат ного стана и качества выпускаемой продукции. Формула изобретения Система регулирования натяжения полос, содержащая в каждой вертикальной клети датчик наличия проката в валках, первый тахогенератор, первый регулятор скорости,.двигатели ,привода вертикальных валков, в каждой горизонтальной клети второй тахогенератор, второй регулятор скорости, двигатель привода горизонтальных валков, датчики давления металла на валки, второй датчик наличия проката в валках, датчики горизонтальных сил, решающий блок, блок умножения, сумматор, блок вычисления, логический элемент, индикатор натяжения и формирующий блок, причем вход «первого регулятора скорости соединен с первым тахогенератором, а выход первого регулятора скорости соединен с двигателем привода вертикальных валков, вход второго регулятора скорости соединен с вторым тахогенератором, выход второго регулятора скорости соединен с двигателем привода горизонтальных валков, вход второго датчика наличия проката в валках соединен с выходами датчиков давления металла на валки, входы решающего блока соединены с выходами датчиков давления металла на вгшки и выходами датчиков горизонтальных сил, вход блока вычисления данной клети соединен с выходом блока вычисления в последующей клети, входы логического элемента .г соединены с выходом блока вычисления и с выходами датчиков наличия проката в горизонтальных валках данной клети и в горизонтальных валках предыдущей клети, а выход логического элек;ента соединен с входом второго регулятора скорости и с входом индикатора натяжения, входы фор1 1ирующего блока соединены с выходом блока вычисления и с выходами датчиков наличия проката в вертикальных валках и датчиков наличия проката в горизонтальных валках предыдущей клети, вход блока памяти .соединен с формирующим блоком, а выход блока памяти соединен с входом блока вычисления, с входом первого регулятора скорости и с входом первого индикатора натяжения, о т л и ч,а ю щ а я с я тем, что, с целью уменьшения разноширинности проката при разгоне и торможении клетей путем повншения точности pej гулирования. натяжения, она дополнительно содержит блок коррекции, .. первый и второй входы кЪторого соединены соответственно с выходом второго тахогенератора и с выходом сумматора, а выход блока коррекции соединен с входом блока вычисления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2642212/22-02, кл. В 21 в 37/06, 1978. Hfefr 6j-f от ffmoj fo /rfffirffpfff/e/ ffPa, г ffaembj От BK/ieruttJ i CUMf fffrmftcf f7
