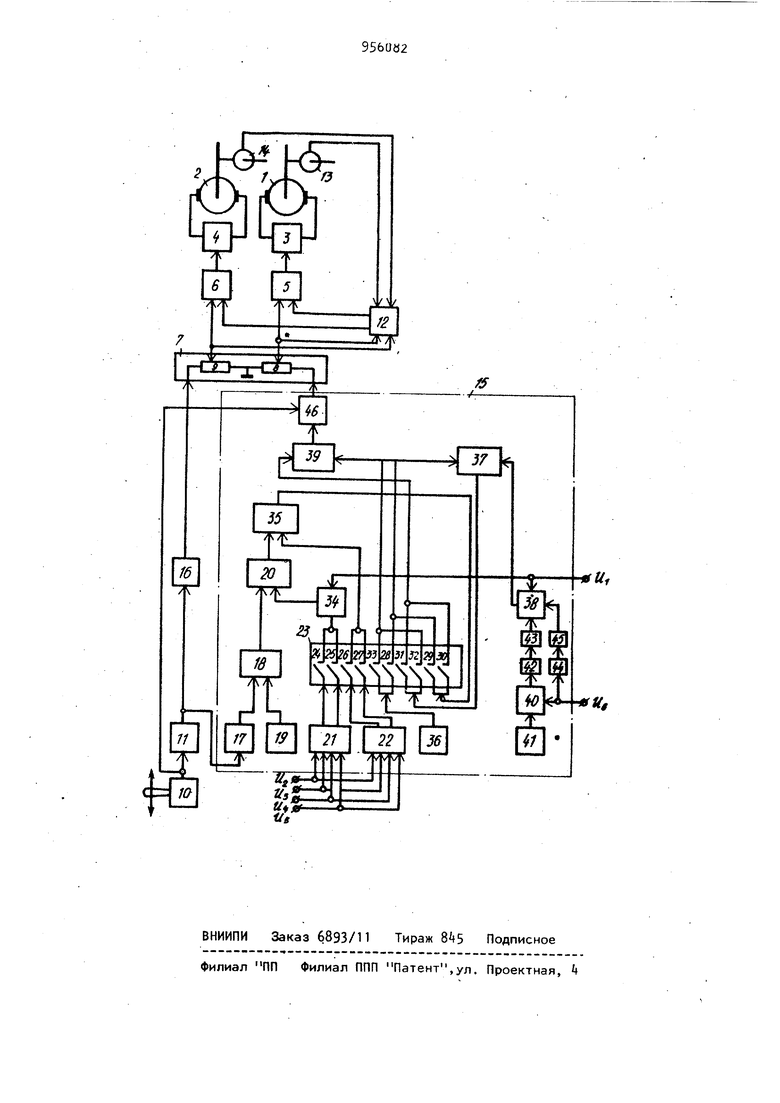
льных валков, выход командезадающего .блока соединен с входом задатчика интенсивности, первый и второй выходы регулятора отношения частот вращения электроприводов соединены с вторыми входами блоков подчиненного регулирования электроприводов, первый и второй входы регулятора отношения частей вращения электроприводов соединены с датчиками частот вращения электроприводов 1J. Однако это устройство в реальных изменяющихся условиях прокатки и осо бенно при ручном управлении станом, не обеспечивает заданного отношения линейной скорости прокатываемого металла и окружной скорости обжимных валков. Это вызывает прокатку с неуп равляемой по величине силой подпора или натяжения, а следовательно, и по явление знакопеременных сил, которые уменьшают надежность, срок служб и производительность прокатного стана . Устранить появление и отрицательные действия знакопеременных сил тол ко путем регулирования заданной величины отношения частот вращения электроприводов вертикальных и горизонтальных валков в функции частот вращения их электроприводов, как это осуществляется в известном устройстве управления, практически невозможно. Это обусловлено тем, что в проце се работы стана происходит износ рабочих валков по диаметру. При заданной частоте вращения это ведет к изменению окружных скоростей. Кроме того, при прокатке в каждом частном проходе величины опережения и удли нения прокатываемого металла принимают случайные значения , отличающиеся от некоторых средних значений этих параметров. Поэтому величина от ношения линейной скорости переднего (заднего) конца металла и окружной скорости принимающих (подающих) пар валков не является постоянной и отли чается от величины, принятой при установке частот вращения электроприводов вертикальных и горизонтальных валков. Названные причины вызывают поломки главного электромеханимеского обо рудования, пробуксовки валков, неупругое удлинение и обрыв главных бол тов, стягивающих между собой вертикальную и горизонтальную клети, ослабление узловкрепления и расшатывание клетей стана(Сопровождающиеся дорогостоящими простоями и потерей производительности. Целью изобретения является повышение поломок главного электромеханического оборудования,.простоев стана с вертикальными и горизонтальными валками путем регулирования соотношения окружной скорости валков и линейной скорости прокатываемого металла. Цель достигается тем, что устройство, содержащее электроприводы вертикальных и горизонтальных валков, соединенные механи.чески с валками, источники электрической энергии с регули.руемым напряжением, выходы которых соединены с электроприводами вертикальных и горизонтальных валков, блоки подчиненного регулирования электроприводов вертикальных и горизонтальных валков., блок установки заданного отношения частот вращения электроприводов, задатчик интенсивности, командозадающий блок и регулятор отношения частот вращения электроприводов, причем выходы блоков подчиненного регулирования электроприводов соединены с входами источников электрической энергии с регулируемым напряжением, первый и второй выходы блока установки заданного отношения частот вращения электроприводов вертикальных и горизонтальных валков соединены с первыми входами блоков подчиненного регулирования электроприводов вертикальных и горизонтальных валков, выход командозадакмцего блока соединен с входом задатчика интенсивности, первый и второй выходы регулятора отношения частот вращения электроприводов соединены с вторыми входами блоков подчиненного регулирования электроприводов, первый и второй входы регулятора отношения частот вращения электроприводов соединены с датчиками частот вращения электроприводов, дополнительно содержит блок изменения величины задающего сигнала и блок задержки, причем блок изменения величины задающего сигнала включен между задатчиком интенсивности и первым входом блока установки заданного отношения частот врашения электроприводов, блок задержки включен между выходами задатчика интенсивности и вторым входом блока установки заданного отношения частот вращения электроприводов, первый и второй выходы которого соединены также с третьим и четвертым вх дами регулятора величины отношения частот вращения электроприводов. Блок изменения величины задающег сигнала содержит двухполупериодный детектор, датчик диаметров горизонтальных валков, датчик диаметров ве тикальных валков, четыре блока умножения, два многополюсника, коммутатор с десятью,ключами, два сумма тора, блок деления, компаратор, дат чик силы, датчики статических токов электроприводов вертикальных и гори зонтальных валков и логико-инвертирующий блок, причем вход двухполупериодного детектора соединен с вых дом задатчика интенсивности, первый и второй входы первого блока умноже ния соединены соответственно с выходом двухполупериодного детектора датчиком диаметров горизонтальных в ков, выход первого блока умножения, соединен с первым входом второго бл 1ка умножения, четыре входа первого второго многополюсников предназначе ны для подачи сигналов, пропорциональных величинам обжатий и раство ром вертикальных и горизонтальных валков, первый вход первого сумматора через первый ключ коммутатора соединен с первым выходом и через второй ключ коммутатора с вторым вы ходом первого многополюсника, а выход - с вторым входом второго блока умножения, первый вход третьего блока умножения соединен с выходом второго блока умножения, а второй вход через третий ключ коммутатора соединен с первым выходом второго многополюсника, первый вход четвертого блока умножения через пятый ключ коммутатора соединен с выходом датчика диаметров вертикальных валков и через шестой ключ коммутатора - с выходом третьего блока умнож ния , выход второго сумматора соединен с вторым входом четвертого блока умножения, первый вход блока деления, через седьмой ключ коммута тора соединен с выходом третьего блока умножения и через восьмой ключ коммутатора - с выходом четвер того блока умножения, второй вход блока деления через девятый ключ коммутатора соединен с выходом четвертого блока умножения и через десятый ключ коммутатора - с выходом датчика диаметров вертикальных валков, первый вход компаратора прел назначен для подачи сигнала, пропорционального заданной силе притягивания друг другу вертикальной и горизонтальной клетей, выход датчика силы соединен с вторым входом компаратора, первые последовательно соединенные ключи датчиков статических токов электроприводов вертикальных и горизонтальных валков подключают выход компаратора к первому входу второго сумматора, а вторые последовательнр соединенные ключи датчиков статических токов электроприводов вертикальных и горизонтальных валков подключают первый вход компаратора и второй вход второго сумматора, выход которого присоединен к второму входу четвертого блока умножения, третий вход второго сумматора соединен с вторым входом первого сумматора и предназначен для подачи сигнала, пропорционального единице, первый вход логико-инвертирующего блока соединен с выходом командозадающего блока, второй вход блока - с выходом блока деления, а выход блока - с первь1М входом блока установки величины заданного отношения частот вращения электроприводов. На чертеже изображена структурная схема предлагаемого устройства для регулирования скорости реверсивного прокатного стана с горизонтальными и вертикальными валками. Электроприводы 1 и 2 соответственно вертикальных и горизонтальных валков соединены механически с валками (на чертеже валки прокатного стана не изображены) . Источники 3 и 4 электрической энергии с регулируемым напряжением присоединены к электроприводам 1 и 2 вертикальных и горизонтальных валков и служат для их питания. Блоки 5 и 6 подчиненного регулирования и горизонтальных валков служат для регулирования напряжений, токов, электродвижущих сил якорей электродвигателей по оптимальному закону. Своими выходами они соединены с входами источников 3 и электрической энергии с регулируемым напряжением. Блок 7 установки заданного отношения частот вращения электроприводов, состоящий из потеиципметров 8 и 9 служит для первпнлилпьной установки одинаковых чл. .м Ч1ы ения электроприводов 1 и чергикальных и горизонтальных валков на холостом ходу. Его первый выход соединен с первым входом блока 5 валков а второй выход - с первым входом блока 6 подчиненного регулирования электроприводов 2 горизонтальных валков. Командозадающий блок 10 предназначен для получения ступенчатого сигнала положительного и отрицательного знака, соответствующего направлению прокатки .Вперед и Назад, и приводится в действие оператором прокатного стана или автоматизированной системой управления,
Задатчик 11. интенсивности служит для преобразования ступенчатого сигнала положительного или отрицательного знака в линейно-нарастающий с ограничением по амплитуде си|- нал того же знака. Сигнал с выхода задатчика 11 интенсивности является задающим сигналом управления и определяет закон движения электроприводов 1 и 2 вертикальных и горизонтальных валков. Вход задатчика 11 интенсивности соединен с выходом кома ндозадающего блока 10.
Регулятор 12 отношения частот вращения электроприводов вертикальных и горизонтальных валков предназначен для регулирования величины отношения частот вращения электроприводов 1 и 2 вертикальных и горизонтальных валков на заданном уровне при динамических и статических изменениях частот вращения электроприводов 1 и 2, имеющих место при захвате и прокатке металла. Первый и второй выходы этого регулятора соединены с вторыми входами блоков 5 и 6 подчиненного регулирования электроприводов 1 и 2 вертикальных и горизонтальных валков.
Датчики 13 и И частот вращения электроприводов вертикальных и горизонтальных валков предназначены для получения сигналов, пропорциональных частотам вращения электроприводс в 1 и 2. Их выходы соединены соответственно с первым и вторым входамр регулятора 12 отношения частот вращения электроприводов вертикальных и горизонтальных валков.
Блок 15 изменен 1я величины задающего сигнала предназначен для изменения величины задающего сигнала управления электроприводов 1 вертикальных валков в функции величин диаметров вертикальных и горизонтальных валков с учетом из износа, опережения и удлинения прокатываемого металла и заданной силы притяжения друг к другу вертикальной и горизонтальной клетей стана.
Блок 15 изменения величины задающего сигнала включен между выходом задатчика 11 интенсивности и первым входом блока 7 установки заданного отношения частот вращения электроприводов.
Блок 16 задержки предназначен для задержки задающего сигнала упраления электроприводов 2 горизонтальных валков с целью его согласования во времени с задающим сигналом управления электроприводов 1 вертикальных валков в блоке 7 установки заданного отношения частрт вращения электроприводов. Время задержки сигнала может регулироваться. Блок 16 задержки включен между выходом задатчика 11 интенсивности и вторым входом блока 7 установки заданного отношения частот вращения электроприводов.
Блок 15 изменения величины задающего сигнала состоит из элементов и блоков, назначения и связи которых следующие.
Двухполупериодный детектор 17 предназначен для преобразования двуполярного задающего сигнала управления в однополярный сигнал положительного знака. Он соединен своим входом, одновременно являющимся и входо блока 15 изменения величины задающе;ГО сигнала, с выходом задатчика 11 интенсивности.
Первый блок 18 умножения предназначен для перемножения электрических сигналов. Его первый вход соединен с выходом двухполупериодного детектора 17.
Датчик 19 диаметров горизонтальных валков предназначен для получения сигнала, пропорционального диаметрам горизонтальных валков в текущий момент времени, т.е. с учетом исходных диаметров и величины их износа. Своим выходом он соединен с вторым входом первого блока 18 умножения.
Второй блок 20 умножения предназначен для перемножения электрических сигналов. Его первый вход соединен с выходом первого блока 18 умножения.
Первый многополюсник 2Т предназначен для получения сигналов, про 9 порциональных опережению металла пр прокатке в направлении Вперед и Назад. Он имеет четыре входа для подачи сигналов, пропорциональных величинам обжатий и растворам верти кальных и горизонтальных валков, и два выхода, причем сигнал с первого выхода используется при прокатке Вперед, а сигнал с второго выхода при прокатке Назад. Второй многополюсник 22 предназначен для получения сигналов, пропорциональных удлинению металла при прокатке в направлении Вперед, так и прокатке в направлении Назад Его четыре входа соединены с такими же входами первого многополюсни ка 21. Сигнал с первого выхода второго многополюсника 22 используется при прокатке Вперед, а сигнал с второго выхода - при прокатке Наза Такое решение принято в связи с тем, что при одинаковых уменьшениях растворов валков величины опережения и удлинения прокатываемого металла при прокатке в направлении Вперед и Назад существенно отли чаются. Характеристики вход-выход многополюсников 21 и 22 получают экспе риментальным путем на реальном стане. Электрическую схему многополюсг НИКОВ 21 и 22 синтезируют известными методами на основе характеристик вход-выход. Коммутатор 23 с десятью ключами 24-33 представляет собой электронное устройство и предназначено для включения элементов и блоков блока 15 изменения величины задающего сиг нала по заданной схеме при п|эокатке Вперед и Назад. При этом клю чи включаются при прокатке Вперед, а ключи 25-33 при прокатке Назад. Первый сумматор 3 предназначен для алгебраического схюжения сигналов. Его первый вход через ключ 2 коммутатора 23 соединен с первым выходом и через ключ 25 - с вторым выходом первого многополюсника 21, а выход - с вторым входом второ го блока 20 умножения.Третий блок 3 умножения предназначен для перемножения сигналов. Его первый вход сое динен с выходом второго блока 20 ум ножения , а второй вход через ключ 2б коммутатора 23 - с вторым выходом второго многополюсника 22. 2 Датчик Зб диаметров вертикальных валков служит для получения сигнала, пропорционального диаметрам вертикальных валков в текущий момент времени, т.е. с учетом исходных диаметров и величины их износа. Четвертый блок 37 умножения предназначен для перемножения сигналов. Его первый вход через ключ 28 коммутатора 23 соединен с выходом датчика 36диаметров вертикальных валков и через ключ 29 - с выходом третьего блока 35 умножения. Второй сумматор 38 предназначен для алгебраического сложения сигналов. Его выход соединен с вторым входом четвертого блока 37 умножения. Блок 39 деления предназначен для выполнения действия деления сигналов. Его первый вход через ключ 3D коммутатора 23 соединен с выходом третьего блока 35 умножения и через ключ 31 с выходом четвертого блока 37умножения, Второй вход блока 39 . деления через ключ 32 коммутатора 23 соединен с выходом четвертого блока 37 умножения и через ключ 33 - с выходом датчика Зб диаметров вертикальных валков. Компаратор Q представляет собой электронное устройство, предназначенное для высокоточного сравнения сигналов. Его первый вход предназначен для подачи сигнала, пропорционального заданной силе притягивания друг к другу вертикальной и горизонтальной клетей. Датчик k силы предназначен для получения сигнала, пропорционального механической силе, действующей между вертикальной и горизонтальной клетями стана. Его выход соединен с вторым входом компаратора jQ. Первые последовательно соединенные ключи датчиков 42 и 3 статических токов электроприводов 1 и 2 вертикальных и горизонтальных валков (датчики статических токов электроприводов на чертеже не изображены) соединяют выход компаратора 40 и первый вход второго сумматора 38. Вторые последовательно соединенные ключи датчиков 44 и 45 статических токов электроприводов 1 и 2 вертикальных и горизонтальных валков соединяют первый вход компаратора 40 и второй вход второго сумматора ЗЗ, , третий вход которого соединен с вторым входом первого сумматора 34 и
предназначен для подачи сигнала, пропорционального единице,
Логико-инвертирующий блок 46 предназначен для логического определения знака сигнала на выходе командозадающего блока 10 устройства и ИН1 . версирования выходного сигнала блока 39 деления в соответствии со знаком сигнала на выходе командозадаюг. щего блока 10. Логико-инвертирующий блок 46 первым входом соединен с выходом командозадающего блока 10, вторым входом - с выходом блока 39 деления, а выходом - с первым входом блока 7 установки величины заданного отношения частот вращения электг роприводов вертикальных и горизонтальных валков, первый и второй .выходы которого дополнительно соединены с третьим и четвертым входами регулятора 12 величины отношения частот вращения электроприводов вертикальных и горизонтальных валков.
Принцип работы предлагаемого устройств.а поясняется на примере использования его для регулирования скорости прокатных валков универсального слябинга, вертикальная клеть которо-го расположена перед горизонтальной.
Рассмотрим соотношение скоростей движения прокатываемого металла и связь этих скоростей с окружными скоростями валков и частотами вращения электроприводов 1 и 2. Для этого используется известное в теории прокатки условие равенства секундных объемов металла на выходах из валков, записанное уравнением
(1)
UM.-F-, UMI-FT
где и,уд,и,ч((17 скорости выхода прокатываемого металла из вертикальных и горизонтальных валков;
F, FO - площади поперечного сечения раската на выходах из вертикальных и горизонтальных валков
Прокатка Вперед.
Скорость выхода металла из валков для прокатки с натяжением (с притягиванием друг к другу вертикальной и горизонтальной клетей) определяетсяt
s )0+f) (2) и„г UaeO+S-ig) , (3)
где окружные скорости COOT-, ветственно вертикальных и горизонтальных валков при прокатке Вперед ;
опережения (отставаID io
ния; металла соответственно.на выходах из вертикальных и горизонтальных валков при прокатке Вперед ;
- относительное упругое удлинение раската - величина пропорциональная силе натяжения, при
0 имеет место свободная прокатка. Тогда уравнение (1) с учетом уравнеНИИ (2) и (З) записывается ,
«
)()Гг%(,б)
Из уравнения С) видно, что для выполнения условия, записанного уравнением (1), при изменяющихся величиHax/S g S g, ,F, Рг2 необходимо определенным образом регулировать окружные скорости валков. Это возможно путем или одновременного изменения
задающего сигнала управления электроприводов вертикального и горизонтального валков, или только одного из них.
Для обеспечения выполнения уравнения (1) из практических соображений целесообразно изменять задающий сигнал управления электропроводов 1 вертикальных валков, оставляя неизменным задающий сигнал управления
электропроводов 2 горизонтальных валков. Это объясняется тем, что электропроводы 1 вертикальных валков, как правило, более быстродействующие и меньше загружены статичесКИМ моментом. Кроме того, задающий сигнал управления электроприводов 2 горизонтальных валков изменять невыгодно, так как он определяет производительность стана.
Поэтому в предложенном устройстве регулирования с целью устранения знакопеременных сил и их отрицательного действия на стан, обусловленных невыполнением условия уравнения (1), а также для создания заданной по величине силы притягивания вертикальной и горизонтальной клетей друг к другу изменяют величину задающего сигнала управления электроприводов 1 вертикальных валков.Пр этом изменяется величина отношения частот вращения электроприводов .1 и 2 вертикальных и горизонтальных валков. Задающий сигнал управле ния электроприводов 2 горизонтальных валков принят за базовый.С учетом изложенного и уравнения () окружная скорость вертикальных валков при прокатке определяется (1в (l.5,,)(l.f) . . гдеАв -ё- - относительное удлинение раската при прокатке Вперед. Если учесть известную связь межд окружной скоростью и частотой вращения валков, а также принять во внимание, что в уравнении (5) ). где Sg - некоторая эквивалентная ве личина опережения металла при прокатке Вперед то частоту вращения электроприводов 1 вертикальных валков при базовой скорости Ur) ,ожно определить выражением ) D, (-t) где D, Dr,- диаметры вертикальных и горизонтальных валко частота вращения элект роприводов 1 вертикаль ных валков при прокатке Вперед ; частота вращения элект роприводов 2 горизонтальных валков. При прокатке Вперед оператор стана воздействует на командозадающий блок 10, При этом включаются ключи 2А-32 коммутатора 23 и на выходе командозадающего блока 10 появляется ступенчатый сигнал, например, положительного знака, который поступает на вход задатчика 11 интенсивности. В задатчике 11 интенсив ности он преобразуется в линейнонарастающий с ограничением по ампли туде задающий сигнал управления того же знака и поступает на вход бло ка 15 изменения величины задающего .сигнала 15 и вход блока 1б задер ки. Задающий сигнал, пропорциональный частоте вращения uu,электроприводов 2 горизонтальных валков без изменения, но с задержкой во времени,проходит через блок 1б задержка и поступает на второй вход блока 7 установки заданного отношения частот вращения электроприводов. За время задержки задающий сигнал в блоке 15 . изменения величины задающего сигнала изменяется в соответствии с уравнением (6) и поступает на первый вход блока 7 установки заданного отношения частот вращения электроприводов. При этом изменение сигнала осуществляется следующим образом. Задающий сигнал, пропорциональный частоте вращения ои электроприводов 2 горизонтальных валков, проходит через двухполупериодный детектор 17 и поступает на первый вход первого блока 18 умножения. На второй вход этого блока поступает с выхода датчика 19 диаметров горизонтальных валков сигнал, пропорциональный диаметрам 0, горизонтальных валков. Сигнал с выхода первого блока 18 умножения , пропорциональ ный 12, поступает на первый вход второго блока 20 умножения. На второй вход этого же блока поступает с выхода первого сумматора 3 сигнал, пропорциональный (1+Sg), причем этот сигнал формируется из сигнала U., пропорционального единице, который поступает на второй вход сумматора 3 и сигнала, пропорционального S , который поступает на первый вход сумматора 3 с первого выхода первого многополюсника 21 через ключ 24 коммутатора 23. При этом на входы многополюсника 21 подаются сигналы (i, Ui, , пропорциональные величинам обжатий и растворам вертикальных и горизонтальных валков. Сигнал с выхода второго блока 20 умножения, пропорциональный ш, .(1 + Sg), поступает на первый вход третьего блока 35 умножения. На второй вход этого блока через ключ 26 коммутатора 23 поступает с первого выхода второго многополюсника 22 сигнал, пропорциональный Xg удлинению металла. Сигнал с выхода третьего блока 35 умножения, пропорциональный Di24l+S)-Ag, через ключ 30- коммутатора 23 поступает на первый вход блока 39 деления. На второй вход этого блока через ключ 32 коммутатора 23
поступает сигнал с выхода четвертого блока 37 умножения, пропорционалный 0(1+ ), причем этот сигнал формируется из сигнала, пропорционального диаметрам вертикальныхвалков D, который поступает на первый вход четвертого блока 37 умJweния через ключ 28 коммутатора 23 с выхода датчика Зб диаметров вертикальных валков и сигнала, пропорционального ,(1+) , который поступает на второй вход четвертого блока 37 умножения с выхода второго сумматора 38.
Если прокатываемый металл находится только в одной из пар валков то на выходе второго сумматора 38 имеется сигнал, пропорциодальный единице. При .прокатке металла в вертикальных и горизонтальных валка датчик 41 силы выдает сигнал, пропорциональный силе,действующей через прокатываемый металл на вертикальную и горизонтальную клети стана. Этот сигнал поступает на второй вход компаратора 40, где сравнивается с сигналом и, пропорциональным заданной силе .притягивания, который подается на его первый :5ход. На выходе компаратора О-появляется сигнал if, пропорциональный разности измеренной и заданйой сил притягивания клетей стана. Этот сигнал через первые ключи 2, 43 датчиков статических токов элекроприводов 1 и 2 вертикальных и горизонтальных валков поступает На первый вход второго сумматора 38. На второй вход этого сумматора через вторые ключи tk, kS упомянутых датчиков поступает сигнал U/, а на третий вход - сигнал .-U. На выходе второго сумматора 38 появляется сигнал, пропорциональный (Т+е), гд
. .
Сигнал с выхода блока 39 деления, пропорциональный частоте вращения wJi электроприводов вертикальных валков 1, поступает на второй вход логико-инвертирующего блока , на первый вход которого подается сигнал с выхода командозадающего блока 10. В логико-инвертирующем блоке осуществляется логический анализ знаков входящих сигналов. Если эти сигналы имеют разные знаки, то сигнал, поступающий с выхода. блока 39 деления, инвертируется и подается на перёый вход блока 7 УС
тановки величины отношения частот вращения электроприводов, если знаки одинаковые, то подается без инверсирования. Таким образом, в
блоке 15 изменения величины задающего сигнала задающий сигнал, пропорциональный ш , изменяется в. сигнал, пропорциональный ш , в ;функции диаметров валков с учетом
их износа, величины опережения и удлинения прокатываемого металла и заданной силы притягивания друг к дру гу вертикальной и горизонтальной клетей стана.
С поступлением на входы блока 7 ус тановки заданного отношения частот вращения электроприводов сигналов, пропорциональных u) и ш , через потен циометры Е и 9 протекают токи, создающие на их одинаковых участках паде ния напряжения. Величина отношения этих напряжений, например, при отсутствии металла в валках и идентично настроенных потенциометрах обратно
пропорциональна отношению диаметров горизонтальных-и вертикальных валков. В частном случае, при 0, это отношение равно единице. При прокатке металла, например, только
в одной из пар валков это отношение изменяется в функции опережения и удлинения прокатываемого металла, а при прокатке в обоих парах валков дополнительно в функции заданной силы притягивания клетей стана.
Сигналы с выходов блока 7 установки величины заданного отношения частот вращения электроприводов поступают на первые входы блоков 5 и 6
подчиненного регулирования, выходные сигналы которых воздействуют на входы источников 3 и t электрической энергии с регулируемым напряжением. При этом напряжения на их выходах изменяются по законам, идентичным, изменению задающих сигналов управления электроприводов. По Таким же законам изменяются частоты вращения электроприводов 1 и 2.
Сигналы, пропорциональные ш и ш., с датчиков 13 и It частот вращения поступают на первый и второй входы регулятора 12 отношения частот вращения электроприводов. Одновременно на третий и четвертый входы этого регулятора поступают сигналы с выходов блока 7 установки заданного отношения частот вращения электроприводов. - Если отношения этих сигналов и сигналов с выходов датчиков 13 и частот вращения одинаковы, что возможно, например , при отсутствии ме талла в валках, то на выходах регул тора 12 отношения частот вращения электроприводов сигналы отсутствую Если металл прокатывается а одной или одновременно в обоих парах валков, то у электроприводов 1 и 2 поя ляются динамические и статически изменения частот вращения. При .этом величина отношения сигналов с выходов датчиков 13 и И частот вращени не равна величине отношения сигнало с выходов блока 7 установки заданного отношения частот вращения электроприводов и тогда на выходах регулятора 12 отношения частот вращения электроприводов появляются сигналы, поступающие на вторые входы блоков 5 и 6 подчиненного регули рования. От действия этих сигналов изменяются напряжения на выходах источников 3 и t электрической энер гии, следовательно, и частоты вращения электроприводов 1 и 2. Регулирование продолжается до тех пор, пока не получится заданная величина отношения частот вращения электроприводов 1 и 2 вертикальных и горизонтальных валков. Таким образом, с введением в регулятор 12 отношения частот вращения электроприводов сигналов с выходов блока 7 установки величины заданного отношения частот воащения электроприводов, он регулирует величину отношения частот вращения электроприводов 1 и 2 дополнительно в функции величин диаметров валков с учетом их износа, опережения и уд линения прокатываемого металла, а также заданной силы притягивания друг к другу клетей стана. Прокатка Назад. Скорость выхода металла из валков дЛя прокатки с натяжением определяется4,,, (7) U.Л(( (8) уравнение (1) записываПри этом ется в виде )0)() 218 Окружная скорость вертикальных валков при прокатке Назад определяется выражением н(анК) 1н (TTs;j где S , опережения металла на выходах из вертикальных и горизонтальных валков при прокатке Назад ; относительное удлинение раската при прокатке НазадЕсли учесть известную связь между окружной скоростью и частотой вращения валков, а также принять во внимание, что в уравнении (10) (111г« 1-й.5 ) /- некоторая эквивалентная величина опережения металла при прокатке Назад, . то частоту вращения электроприводов 1 вертикальных валков при можно определить выражением 1(( частота вращения электроприводов 1 вертикальных валков при прокатке Назад. При прокатке Назад предлагаемое устройство работает так же, как и при прокатке Вперед, но наложенной выше, причем при работе Назад включаются ключи 25-33 коммутатора 23. При этом через ключ 25 со второго выхода первого многополюсника 21 поступает сигнал, пропорциональный S , на первый вход первого сумматора З. Через ключ 27 на второй вход третьего блока 25 умножения поступает сигнал, пропорциональный Л-н со второго выхода второго многополюсника 22. Через ключ 29 коммутатора 23 на первый вход четвертого блока 37 умножения поступает, сигнал с выхода третьего блока 35 умножения.Через ключ 31 на первый вход блока 39 деления поступает сигнал,пропорциональный ,-(;1 SH) ( ) i с выхода четвертого блока 37 умножения. Через ключ 33 на второй вход блока 39 деления поступает сигнал. пропорциональный диаметру вертикальных валков 0: , с выхода датчика Зб диаметров вертикальных валков. При прокатке Назад в блоке 15 изменения величины задающего сигнала задающий сигнал изменяется пропор ционально выра жению (-11). Предлагаемое устройство позволяет при захвате металла валками устранить или, по крайней мере, существенно уменьшить удары раската о вторую пару обжимных валков. Это обе спечивается блоком задержки и устрой ством изменения величины задающего сигнала управления, которые позволяют изменять частоту вращения элект роприводов валков дополнительно в функции диаметров валков, рпережения и удлинения металла и более точ но согласовать скорости вертикальных и горизонтальных валков, а также прокатываемого металла. При прокатке металла в обоих, пара .валков исключается неупругое удлинение главных болтов, стягивающих межд собой вертикальную и горизонтальную клети, не ослабляются узлы крепления кЛетей и не происходит расшатыва ние стана, это обеспечивается устрой ством изменения величины задающего сигнала управления, которое позволяет изменять частоту вращения электро приводов валков дополнительно в функ ции величины силы притягивания клете стана, Уменьщаются поломки и повыщается надежность работы главного электромеханического оборудования стана, по является возможность применения боле интенсивных режимов прокатки, сокращаются простои оборудования и повыша ются технико-экономические показател работы прокатных станов, это обеспечивается предлагаемым устройством в целом и особеннб устройством изменения величины задающего сигнала и регулятором отношения частот вращения электроприводов. В результате использования предла гаемого устройства управления,например, только для слябинга 1150 Магнитогорского комбината ожидаемый экономический эффект составляет 18 тыс. руб. в год (см. расчет ожидаемой экономической эффективности). Формула изобретения 1. Устройство для регулирования скорости реверсивного прокатного 2 стана с вертикальными и горизонтальными валками, содержащее датчики частот вращения электроприводов вертикальных и горизонтальных валков, электроприводы, соединенные механически с валками, источники электрической энергии с регулируемым напряжением , выходами соединенные с электроприводами, блоки подчиненного регулирования электроприводов, блок установки заданного отношения частот вращения электроприводов, задатчик интенсивности, командозадающий блок и регулятор отношения частот вращения электроприводов, причем выходы блог ков подчиненного регулирования электроприводов соединены с входами источников электрической энергии с регулируемым напряжением, первый и второй выходы блока установки заданного отношения частот вращения электроприводов соединены с первыми входами блоков подчиненного регулирования электроприводов, выход командозадающего блока соединен с входом задатчика интенсивности, первый и второй выходы регулятора отношения частот вращения электроприводов соединены с вторыми входами блоков подчиненного регулирования электроприводов, первый и второй входы регулятора отношения частот вращения электроприводов соединены с датчиками частот вращения электроприводов, отличающееся тем, что, с целью уменьшения поломок главного электромеханического оборудования и простоев стана путем регулирования соотношения окружной скорости валков и линейной скорости прокатываемого металла, оно содержит блок изменения величины задающего сигнала и блок задержки, причем блок изменения величины задающего сигнала включен между задатчиком интенсивности и первым входом блока установки заданного отношения частот вращения электроприводов, блок задержки включен между выходом задатчика интенсивности и вторым входом блока установки заданного отношения частот вращения электроприводов, первый и второй выходы которого соединены также с третьим и четвертым входами регулятора величины отношения частот вращения электроприводов . 2. Устройство по п. 1, о т л ичающееся тем, что блок г-зменения величины задающ-лго си| чаг.содержит двухполупериодныи детектор датчик диаметров горизонтальных валков, датчик- диаметров вертикальных валков, четыре блока умножения, два многополюсника, коммутатор с десятью ключами, два сумматора, блок деления, компаратор, датчик силы, датчики статических токов электроприводов вертикальных и горизонтальных валков и логико-инвертирующий блок, причем вход двухполупериодного детектора соединен с выходом задатчика интенсивности, первый и второй входы первого блока умножения соединены соответственно с выходом двухполупериодного детектора и датчиком диаметров горизонтальных валков, выход первого блока умножения соединен с первым входом второго блока умножения, четыре входа первого и второго многополюсников предназначены для подачи сигналов, пропорциональных величинам обжатий и ра створам вертикальных и горизонтальных валков, первый вход первого сумматора через первый ключ коммутатора соединен с первым выходом и через второй ключ коммутатора с вторым выходом первого многополюсника, а выход- с вторым входом второго блока умножения, первый вход третьего, бло.ка умножения соединен с выходом второго блока умножения, а второй , вход через третий клю коммутатора соединен с первым выходом второго многополюсника, первый вход четверто го блока умножения через пятый ключ коммутатора соединен с выходом датчи ка диаметров вертикальных валков и через шестой ключ коммутатора - с вы ходом третьего блока умножения,.выт ход второго сумматора соединен с вто рым входом четвертого блока умножения, первый вход блока деления через седьмой ключ ()утатора соединен с входом третьего блока умножения и че рез восьмой ключ коммутатора,- с выходом четвертого блока умножения, второй вход блока деления через девятый ключ коммутатора соединен с выходом четвертого блока умножения и через десятйй ключ коммутатора - с выходом датчика диаметров вертикальных валков, первый вход компаратора предназначен для подачи сигнала, пропорционального заданной силе притягивания друг к другу вертикальной и горизонтальной клетей, выход датчика силы, соединен с вторым входом компаратора, первые последовательно соединенные ключи датчиков статических токов электроприводов вертикальных и 1 оризонтальных валков подключают выход компаратора к первому входу второго сумматора,а вторые последовательно соединенные ключи датчиков статических токов указанных электроприводов подключают первый вход компаратора и второй вход второго сумматора, выход которого присоединен к второму входу четвертого блока умножения, третий . вход второго сумматора соединен с вторым входом первого сумматора и предт назначен для подачи сигнала, пропорционального единице, первый вход логико-инвертирующего блока соединен с выходом командозадающего блока, второй вход логико-инвертирующего блока с выходом блока деления, а выход логико-инвертирующего блока - с первым входом блока устанвоки величины заданного отношения частот вращения электроприводов. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № А837658, л. В 21 В 35/08, 1973.
/
;ег






| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скоростей главных электроприводов реверсивной универсальной клети и устройство для его осуществления | 1985 |
|
SU1310053A1 |
| Способ регулирования скорости электроприводов реверсивного прокатного стана с вертикальными и горизонтальными валками | 1986 |
|
SU1360834A1 |
| Устройство косвенного регулирования размеров проката в непрерывной группе клетей мелкосортно-проволочного стана | 1987 |
|
SU1414488A1 |
| Устройство для автоматического поддержания постоянной толщины проката | 1980 |
|
SU908456A1 |
| Система автоматического управления реверсивным прокатным станом | 1985 |
|
SU1268233A1 |
| Устройство для управления натяжением проката в непрерывной группе клетей мелкосортно-проволочного стана | 1986 |
|
SU1384351A1 |
| Устройство для фильтрации эксцентриситета валков при автоматическом регулировании толщины полосы | 1982 |
|
SU1063496A1 |
| Способ реверсивной прокатки | 1990 |
|
SU1741945A1 |
| Устройство регулирования натяжения полосы в межклетевых промежутках непрерывного прокатного стана | 1987 |
|
SU1519806A1 |
| Устройство управления электроприводом обжимного реверсивного прокатного стана | 1976 |
|
SU671890A1 |
Е-
)2Ф5
Ж.
/ f
/
21
/7
11
LT 1
V k / V
L-JT
дг 6
2Г55
й
93 гв Sf 30
да
V о V
