к входу блока регулирования, выхоД механизма управления дополнительно подключен к входам инвертора, следящего и запоминающего элементов, выходы запоминающего элемента и инвертора соединены с входог элемента совпадения, выход которого под-
соединен к входу генератора прямо-. ,гольных сигналов вместе с выходом следящего элемента, вход запоминающего элемента соединен с выходом второго релейного элемента, вход кохорр го связан с выходом первого релейного элемента....

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения технического состояния системы регулирования турбоагрегата | 1983 |
|
SU1127980A1 |
| Способ определения технического состояния системы регулирования турбоагрегата | 1986 |
|
SU1370261A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| Автоматический регулятор нагрузки горной машины | 1981 |
|
SU1076578A1 |

1. Способ определения технического состояния системы регулированиятурбоагрегата, на вход которой подают управляющие воздействия и отклонения регулируемых параметров, путем подачи на вход системы единичного прямоугольного сигнала заданной длительности и амплитуды, измерения и сравнения с эталонными значениями величины вьлходного сигнала и времени его запаздывания и выявления на этой основе увеличенных люфтов и сил, трения, отличающийся тем, что, с целью упрощения реализации и повышения достоверности, предварительно определяют первую и вторую эталонные зависимости между Уменьшением величины выходного сигнала и увеличением времени запаздывания соответственно приувеличении люфтов и при увеличении сил трен.ия, а в процессе эксплуатации сравнивают откло1ш-. ния регулируемых параметров с задан ными пороговыми значениями и подачу прямоугольного сигнала производят при отклонениях, меньших этих значе7 .4Mv.-T.ei-;.:,- НИИ, в момент окончания управляющего воздействия со знаком, обратным знаку этого воздействия,вводят запрет на .управляющие воздействия, причем амплитуду пря лоугольного сигнала задают в диапазоне от допускаемой степени нечувствительности до степени неравномерности регулируемого параметра, а длительность прямоугольного сигнала задают равной номинальному времени разгона разомкнутой системы, измерение величины выходного сигнала производят, в момент прохождения заднего фронта прямоугольного .сигнала, время, запаздывания определяют как интервал между передним фронтом прямоугольного сигнала и -мо- И ментом достижения выходным сигналом заданного начального уровня, определяют эксплуатационную зав-исимость между уменьшением величины выходного сигнала и увеличением времени Эапаздывания и выявление увеличения люфтов и сил трения ведут по степени прибли- жения этой зависимости к первой или второй эталонным зависимостям. I 2.Устройство для определения техни1ческого состояния системы регулировария турбоагрегата способом по П.1,со-. держащее датчики положения . сёрвомоsTopa, регулирующих клапанов, подклю00 У |ченные. к входу регистратора, механизм управления и датчики входного сигнала, подключенные к входу блока регулирования, отличающе ес я тем, что, с целью упрощения pea- лизаций и повыуения достоверности, в него введены два релейных элемента, запоминающий элемент, инвертор, элемент, совпадения, следящий элемент и генератор прямоугольных сигналов, причем вход регистратора дополнительно соединен с выходом первого релейного элемента, вход которого подсое1динен к выходу генератора прямоугольных сигналов, подключенному также
1 Изобретение -относится к энергетике и может быть использовано при эксплуатации .систем регулирования турбоагрегатов.. Известны способы определения технического состояния системы регулиро вания турбоагрегата, на вход которой подают управляющие воздействия и отклонения регулируемых параметров путем.подачи на вход системы контрол ных сигналов, измерения и сравнения с эталонньми значениями величины выходного Сигнала и выявления на этой основе увеличенных люфтов и сил трения Г1 . Однако достоверность этих способов недостаточна, .так как они основы ваются только на статических и нагру зочных характеристиках. Наиболее близким к изобретению по технической сущности является способ определения техническогосостояния системы регулирования турбоагрегата, на вход которой подают управляющие воздействия и отклонения регулируемы параметров, путем подачи на вход сис темы единичного прямоугольного сигнала заданной длительности и амплитуды, измерения и сравнения с эталонными значениями величины выходного сигнала и времени его запаздыва ния и выявления на этой основе увели ченных люфтов и сил трения 2. Наиболее близким по технической сущнос: является устройство для определения технического состояния системы регулирования турбоагрегата , содержащее датчики положения сер .мотора регулирующих клапанов, подключенные к входу регистратора, меха низм управления и датчики входного сигнала, подключенные к входу блока регулирования C3J. Недостатком известного устройства является сложная реализация и пони женнаядостоверность. Цель изобретения - упрощение реализа.ции и повьошение достоверности. Эта цель достигается тем, что . согласно, способу определения технического состояния системы регулирова ния турбоагрегата, на вход которой nqparoT управляющие воздействия и отклонения регулируемых параметров, путем подачи на вход системы единичного прямоугольного сигнала заданной длительности и амплитуды, измерения и сравнения с эталонными значениями велич:ины выходного сигнала и времени его запа.здывания и выявления на этой основе увеличенных люфтов и сил трен.ия, предварительно определяют первую и вторую эталонные зависимостимежду уменьшением величины выходного сигнала и увеличением времени запаздывания соответственно при увеличении люфтов и при увеличении сил трения, а в процессе эксплуатации сравнивают отклонения регулируег.1ых пара-метров с заданными пороговыми значениями и подачу прямоугольного сигнала производят при отклонениях, меньших этих значений, в момент окончания управляюк.его воздействия со знаком, обратным знаку, этого воздействия, вво-дят запрет на управляющие воздействия, причем амплитуду прямоугольного сигнала задают в диапазоне от допускаемой степени нечувствительности до степени неравномерности регулируемого параметра, а длительность прямоугольного сигнала задают равной номинальному времени разгона разомкнутой CHCTGNSbj, измерение величины выходного сигнала производят в момент прохождения заднего фронта пряйоугольного сигнала, время запаздывания определяют как интервал между передним фронтом прямоугольного сигнала и моментом достижения выходным сигналом заданного начального уровня, определяют эксплуатационную зависимость между уменьшением величины выходного сигнала и увеличением времени запаздывания и выявление увеличения люфтов и сил трения ведут по степени приближения этой зависимости к первой или второй эталонным зависимостям, В устройство для определения технического состояния системы регулирования турбоагрегата, содерлсащее датчики, положения сервомотора регулирующих клапанов, подключенные к входу регистратора, мг-:.. ..-пгавления и датчики входного ..--ла, подключенные ;- блока рзгулирования, введены два релейных элемента запоминающий элемент, инвертор, эйемент совпадения, следящий элемент и генератор прямоугольных сигналов, причем вход регистратора дополнительн .соединен с выходом первого релейного элемента, вход которого подсоединен .1к выходу генератора прямоугольных. сигналов, подключенному также к входу блока регулирования, выход Nieханизма управления дополнительно подключен к входам инвертора, следящего и запоминающего элементов выходы запоминающего элемента и ийвертора соединены с входом элемента .срвпадений, выход которого подсоедииен к входу генератора прямоугольных .сигналов вместе с выходом следящего элемента,вход запоминающего элемента соединен с выходом второго релейного элемента, вход которого связан с выходом первого релейного элемента.:
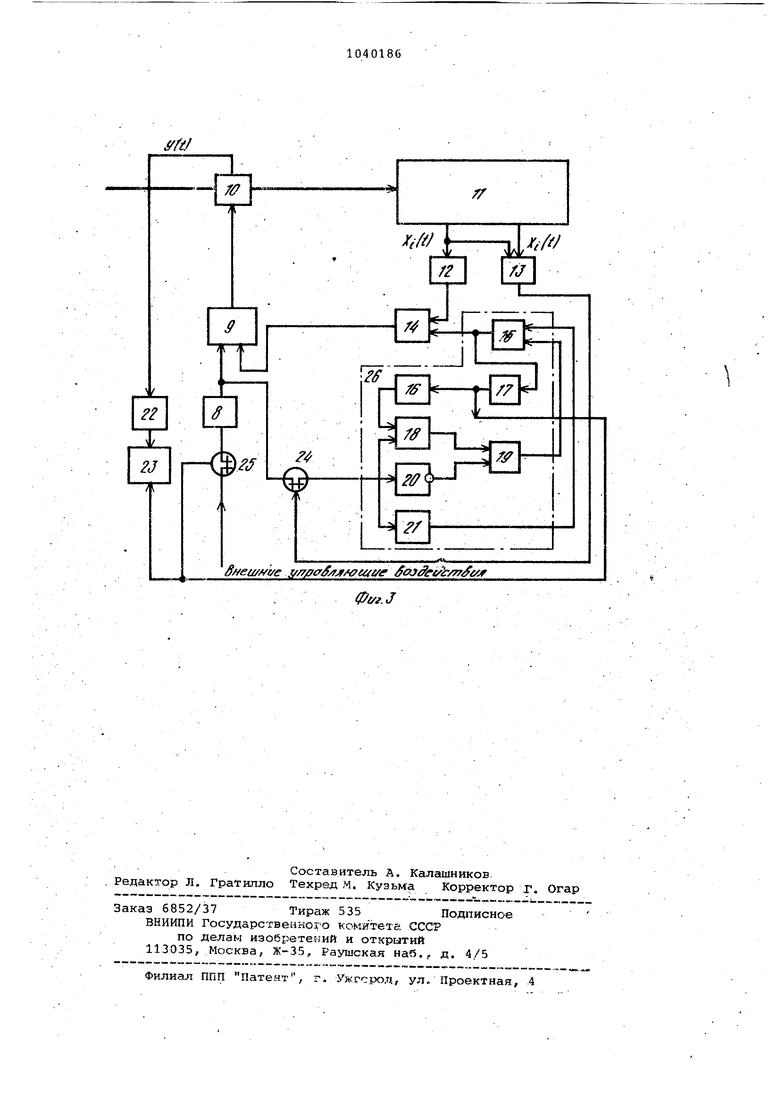
На фиг,1 представлены входные и выходные сигналы системы регулирования; на фиг.2 - зависимости между уменьшением величины выходного сигна ла и убеличением времени запаздывани на фиг.З - схема устройстваi
Система регулирования содержит {фиг.1 ) ступенчатый сигнал 1, единичный прямоугольный сигнал 2, переходный процесс 3 изменения выходного сигнала при подаче ступенчатого сиг.нала, переходный процесс 4 изменения выходного сигнала при подаче единичного прямо.угольного сигнала, входйые ;Сигналы X, выходные сигналы У, время -fc , амплитуду Х прямоугольного ригнала, значение У выходного сигнала системы регулирования, время tj {запаздывания системы, Т - длительность прямоугольного сигнала, разную времени разгона разомкнутой системы, заданный начальный уровень ду , выходного сигнала.
При подаче на вход системы ступенчатого сигнала 1 выбранной амплитуды Х на выходе регистрируется процесс 3, из которого определяется длительность Т пря юугольного сигнала. При подаче на вход системы прямоугольйого сигнала 2 на выходе регистрируется время Гд запаздывания, определяемое как интервал между передним фронтом сигнала 2 и моментом достижения выходным сигналом заданного начального уровня йУ} величина У выходного сигнала, определяемая в момент проХЬж дения заднего фронта сигнала 2,
Кроме того, система содержит (фиг. эталонн /ю зависимость 5 между уменьшением величины выходного сигнала и увеличением времени С запаздывания при увеличении сил трения, эталонную зависимость 6 между уменьшением ре-Т личины У выходного сигнала и уве)(1Ичением времени о запаздывания при, увеличении люфта, эксплуатационную,
зависимость 7, время Т запаздывания эталонной системы, доп -скаемое время дог1 запаздывания системы , значение Yg выходного сигнала эталонной системы, допускаемое значение выходного, сигнала.
Реальное состояние системы отражается зависимостью 7, лежащей в области между зависимостями э и- б, Ьтличающимися противополож.аой кривиз ной, причем,характер кривизны завиЪи-мости 5 отражает теоретическое накопление системой чистого трения, а характер кривизны зависимости Б соответственно - чистого люфта. Характер и скорость приближения. точек реальной кривой 7 к зависимостям 5 и 6 позволяют делать -заключение о количественных и качественных изменениях в системе. Граничные условия, лимитирующие дальнейшую эксплуатацию системы, показаны по-лями допускЪв минимальной величины выходного сигнала максимальной величины времени запаздывания lUo/,
Устройство содержит механизм 8 ,/ управления турбиной, блок 9 регулирования, сервомотор 10 регулирующих клапанов, турбоагрегат 1 Г,, датчик 12 входного сигнала, датчик-преобразователь 13 входных сигналов, суммирующий элемент 14, генератор 1 прямоугольных сигналов, релейные элементы 16 и 17, запоминающий элеме 18, элемент совпадения 19, инвертор 20, следящий элемент 21, датчик 22 положения сервомотора, регистратор 23 выходного сигнала, блокирующие контакты 24 и 25, текущее значение Y( выходного сигнала, текущие значения Xf (t) входных сигналов.
Контурной линией выделен блок 26 управления, который обеспечивает запуск генератора 15, запуск протяжки ленты регистратора 23 и запрет включения управляющих воздействий на период действия прямоугольного сигнала. Генератор 15 представляет собой стандартный элемент системы с электрогидравлическим преобразователем, где электромагнитный привод управляет гидравлическим золотником. Электромагнитный привод является, в свою очередь, нагрузкой блока упрд,ления.
В блоке управления использованы типовые логические элементы, релейные элементы 16 и 17, запоминающий элемент, (триггер 18, элемент 19 совпадения, инвертор 20 тл следящий элемент 21, в качестве которого примене триггер с двумя устойчивыми состояниями. Входом блока управления явля ется выход ( дополнительный ) мexaниз 8 .управления, подключенный через нормально замкнутый блокирующий контакт 24. Этот контакт управляется датчиком-преобразователем 13, построенным .по известным схемам селектиривания и ограничения.
Датчик.-преобразователь .13 состой из непосредственно датчика и нелинепного преобразователя-ограничителя, обеспечивающего сравнение входных сигналов с верхней и нижней усТановлен гыми пороговыми зонами и выдающего запрет на включение блока управления при достижении одним из входных сигналов пороговой зоны.
Схема работает следующим образом. Блок 9 регулирования, кроме входа от датчика 12, имеет дополнительнь1р вход от генератора 15. Суммирующим элементом 14 при этом является пер- 15
вый каскад усиления регулируемого параметра. Выход блока управления на дополнительный вход регистратора 23 организован для шаговой протяжки ленты регистратора в период подачи ге- 20 нератором 15 прямоугольного входного сигнала, а такзке для блокирования на этот же период внешних управляющих воздействий.
В исходном состоянии при отсутст- 25 ВИИ управляющего воздействия на механизм 8 управления также отсутствует сигнал на входах в инвертор 20, запоминающий элемент 18 и следящий элемент 21, соответственно на выходе 0 инвертора 20 сигнал есть, а на выходах элементов 18 и 21 - нет. В результате оба входа генератора 15 сигналов не получают. В момент подачи управляющего воздействия сигнал этого воздействия через механизм 8 -управ- енин подается на инвертор 20, запоминающий элемент 18 и следящий элемент 21.Это приводит к исчезновению еигнала на выходе инвертора 20 ,перестанов ке запоминающего элемента 18 в состоя- 40 ние, когда на его выходе появляется
сигнал, и к- срабатыванию следящего элемента 21, определяющего полярность
сигналов генератора 15. Однако это не приводит к запуску генератора 15, поскольку на входе элемента 19 совпадения имеется два разнополярных сигнала-. В момент окончания управляющего воздействия, при котором сигнал на входе инвертора 20 исчезает, на входе элемента 19 совпадения появятся два одноименных сигнала, разрешающие запуск генератора 15. Генератор формирует единичный прямоугольный сигнал, который через суммирующий элемент 14 подается на вход блока 9 регулирования.Одновременно этим сигналом запускаются релейные элементы 16 и 17. При этом, релейный элемент 16 .переставляет запоминающий элемент 18 в исходное состояние, а релейный элемент- 17 выполняет две функции: включает протяжку ленты регистратора на период действия входного сигнала и на этот же перйод отключает через блокирующие контакты 25-внешние управляющие воздействия на систему регулирования. При отклонении регулируемых параметров Т заданного порогового значения по команде датчика-преобразователя 13 разрываются контакть 24 в линии управления генератора 15.
При вводе запрета на управляющие воздействия сохраняется возможность защитных .воздействий.
Предлагаемое изобретение упрощает реализацию определения технического состояния системы регулирования повышает экономичность и надежность эксплуатации турбоагрегата из-за исключения .глубоких изменений нагрузки увеличивает достоверность определения технического состояния за счет использования динамических критериев и повышения возможной частоты проведения испытаний..
S/feu/ ve /TjOO jfjrMeut/e So-} fi/ir/774fujf
0i/i.J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ФОНД ЭНСПЕРТОВ.Л. А. ЗолотаревЗаявиic.ii)Уральское отделекне Всесоюзного государствен|{ого треста | 0 |
|
SU394570A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| G, 05 В 23/00, 1972 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
