, Изобретение относится к весоизм :рительной технике, а более конкрет (К весам для взвешивания транспортн средств в движении. Известны весы для взвешивания . сцепленных вагонов в движении, сод жащие грузоприемную платформу с си измерительньши датчиками, путевые сигнализаторы и регистрирующий при бор И . Однако такие весы нельзя исполь зовать для работы в автоматическом режиме, поскольку перед каждым взвешиванием .состава требуется про дение ручных операций по подготовк весов к работе. Наиболее близким к изобретению является устройство для взвешивания движущихся железнодорожных составов содержащее грузоприемный механизм, силоизмерительные датчики которого подключены к одним входам блока обработки сигналов, выход которого подключен к блоку индикации, а друг вход - к выходу блока движения, к входам которого подключены путевые сигнализаторы 2} . Это устройство также нельзя испо зовать для работы в автоматическом режиме, поскольку оно требует подго товительных операций перед взвешива нием по следующим причинам. При про езде вагонов путевые сигнализаторы . вырабатывают различные последовательности сигналов, анализируя которые, блок движения различает вагоны по типам, например 4-6- и 8-осные, Если Перед взвешиванием состава случайно был приведен в действие хотя бы один путевой сигна лизатор, то ложный сигнаЛ вместе с сигношам вырабатываем&ми при прохождении вагонов,создает, нетипичну последовательность, что приводит к сбою устройства .и весь состав не будет взвешен. Такое же действие на весы оказывают и электромагнитные помехи. . Целью изобретения является повышение надежности устройства за счет автоматической подготовки к работе перед началом взвешивания состава. Поставленная цель достигается тем, что в устройство для взвешивания движущихся железнодорожных составов, содержа щее грузоприемный механизм, силоизмерительные йатчики которогсЗ подключены к одним входам блока обработки сигналов, выход которого подключен к блоку индикаци а другой вход - к выходу блока движ ния , к входам которого подключены путевые сигнализаторы, введены генератор управляющих сигналов и схема ИЛИ, причем крайние путевые сигнализаторы через схему ИЛИ подклю чены к входу генератора управляющи сигналов, выход которого подключен к управляющим входам бл.ока обработки сигналов и блока движения. На чертеже показана структурная , схема предлагаемого устройства. Устройство содержит грузоприемный механизм 1, который встроен в подъездной путь 2 и опирается на силоизмерительные датчики 3, которые соединены со входами блока 4 обработки сигналов. Путевые сигнализаторы 5 J oeдинeны со входами блока движения б. Выход блока движения 6 соединен с одним из входов блока обработки сигналов 4 , выход которого соединен с блоком JIH gикaции 7. Выход генератора 8 управляющих сигналов соединен с выходом схемы ИЛИ 9, ко входам которой подключены крайние путевые сигнализаторы 5, расположенные на подъездном пути. Блок обработки сигналов 4, блок Движения 6 и блок индикации 7 составляют регистрирующий прибор 10. Устройство работает следующем образом. Колеса взвешиваемого вагона, перемещаясь по грузоприемному механизму 1, воздействуют на силоизмерительные .датчики 3, которые вырабатывают сигнал, пропорциональный приложенной нагрузке. Сигналы с силоизмерительных датчиков 3 поступают на блок 4 обработки сигналов. Путевые сигнализаторы 5, взаимодействуя с колесами взвешиваемого вагона, вырабатывают последовательности сигналов, харак/еризующие тип взвешиваемото вагона. Анализируя последовательности сигналов, поступающие с путевых сигнализаторов 5, блок движения 6 различает вагоны по типам (например, 4-,б- и 8-осные) и вырабатывает команды, с помощью которых управляет работой, блока 4 обработки сигналов. К выходу блока 4 обработки сигналов подключен блок индикации 7, показывающий массу взвешиваемого вагона. Генератор 8 управляющих сигналов вырабатывает сигналы, которые, поступая на входы блока движения 6 и блока 4 обработки сигналов, приводят их в состояние готовности к работе. Сигналы, вырабатываемые путевыми сигнализаторами 5, расположенными на подъездном пути 2, поступают на схему. ИЛИ 9, и через нее - на вход генератора 8 управляющих сигналов. Во время взвешивания состава сигналы, приходящие с путевых сигнсшизаторов 5, сбрасывают генератор 8 управляющих сигналов, не давая ему вырабатывать управляющие сигналы. В промежутках между взвешиваниями составов генератор 8 управляющих сигналов периодически вырабатывает управляющие сигналы, с помощью которых блок 4 обработки сигналов и
блок движения б приводятся в состояние готовности к работе, В результате этого случайные срабатывания путевых сигнализаторов, а также электромагнитные помехи, воздействующие на устройство в промежутках между взвешиваниями составов, не отражаются на результатах взвешивания. Период следования управляющих сигналов выбирается несколько большим, чем время, необходимое для прохождения колеса на/минимальной скорости между путевыми сигналиЬаторЙми 5, расположенными на подъездном пути 2, и
может состав- лять 20-30 с.
Использование изобретения позволяет повысить надежность весов для взвешивания движущихся железнодорожных составов, поскольку с его внедрением отпадает необходимость в ручном проведении операций по подготовке весов к работе, и качество их проведения не будет зависеть от весовщика Кроме того, использование изобретения позволяет создать весы, способные работать без традиционного весовщика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания в движении железнодорожного подвижного состава | 1981 |
|
SU994926A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Устройство для взвешивания железнодорожных вагонов | 1984 |
|
SU1213354A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1691689A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, содержащее грузоприемный механизм, силоизмерительные датчики которого подключены к одним входам блока обработки сигналов, выход которого подключен к блоку индикации, a другой вход - к выходу блока движения, к входам которого подключены путевые сигнализаторы, отличающее с я тем, что, с целью повышения надежности за счет автоматической подготовки устройства к работе перед началом взвешивания состава, в него введены генератор управляющих сигналов и схема ИЛИ, причем крайние путевые сигнализаторы через схему ИЛИ подключены к входу генератора управляющих сигналов, выход которого подключен к управляющим входам блока обработки сигналов и блока движения. I 00 00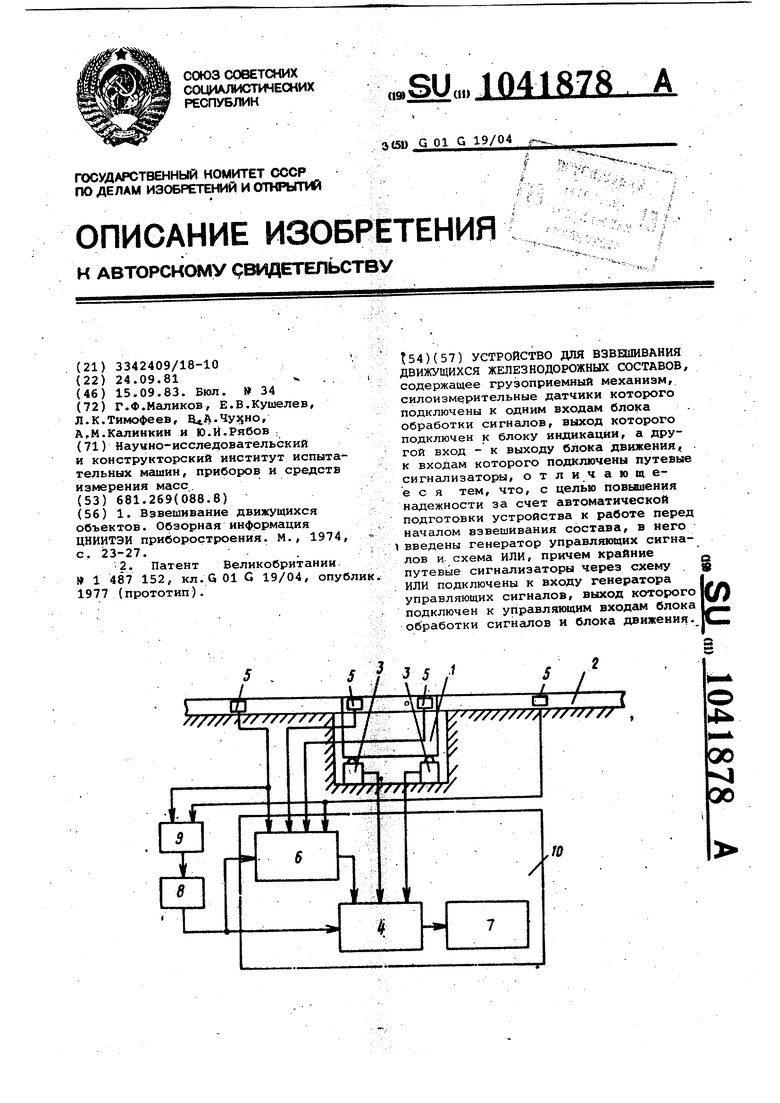
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Взвешивание движущихся объектов | |||
| Обзорная информация ЦНИИТЭИ приборостроения | |||
| М., 1974, « с, 23-27. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
