Изобретение относится к пневматическим. средствам автоматического управления и, в .частности, .может быть ,использовано при со.эдании сисхем автоматическогЪ в.есового . ционного доз-ирования., . . « . 5
Известно пневматическое управля.ющее устройство с импульсным управляющим воздействием, содержащее элемент сравнения, два четырехвходовых сумг матора, pJer yлиpyeмьIeдроссели, нес-. -Ю колько диьгамических и аперио-дйческих /звеньев и вы ходной усилитель с.системой .многоконтурной обратной св.язи, охватывающей устройство в це.гюм и . его отдельные блоки 1J. . 15
Недостатком устройства: является, во-первых зависимо.стгь -.амплитуды управляющего во.здействия и. закона егомодулирования. по длительности/ импульсов от настройки регулят ора, 20 а не от действ-ительного состояния объекта уг равления и его свойств. . . Поэтому при измене.нии пардметров объекта приходится менять и настрой, ку регулятора для, предотвращения . , 25 ухудшения качества, процесса регули-. рования. Во-в-торых, конструкция регулятора достаточно сл|эжна и,- в частности/ для суммирования, сигна- . лов в нем предусмотрены отдельные.; -. блоки, выдающие -промежуточную информацию для элемента сравнения. Кроме того,, устройство включает .большое- число последовательно срабатывающих . .. блоков., в результате чего вся систегМа оказывается относительно инерцион-35 ной, ч.то снижает быстродействие ре-, . гуля-тора. , . .
Наиболее близким к изсэбретению . техническим решением является, пнев-. ма1;ическое управляющее устройство 40 . (весовым порционным дозатором), ко-торое содержит пневмоцилиндр с-дат-чиком перемещения и.подключенным к его полостям воздухораспределителем, управляющие входы которого со- 5 единены с релейными усилителями., включенными соответственно по схеме повторения, и. отрицания, пороговый ; элемент, один вход которого соединен с каналом параметра, другой вход -. еп с задатчиком опорного сигнала, а выход - с входом включения элемента .памяти, вход выключения которого соединен с выходом кнопки управления, четырехвходовой элемент сравнения, первая плюсовая и минусовая камеры которого соединены соответственно с каналом параметра и выходным каналом датчика перемещения, выход четырехвходового элемента сравнения соединен с управляющими входами ре- 0 лейных усилителей и через первкгй дроссель с управляющей камерой нормально Открытого реле, сопло питания которого соединено с выходом задат ика, а выход нормально открытого
реле соединен через второй дроссель . с второй минусовой камерой элемента сравнения С2 J,
Однако динамические характеристики из,вестного устрсэйства -при большой инерционности объекта управления не отвечают современным требованиям по точности и быстродействию работы системы. . .
, Целью изобретения является .улучшение динамических характеристик.
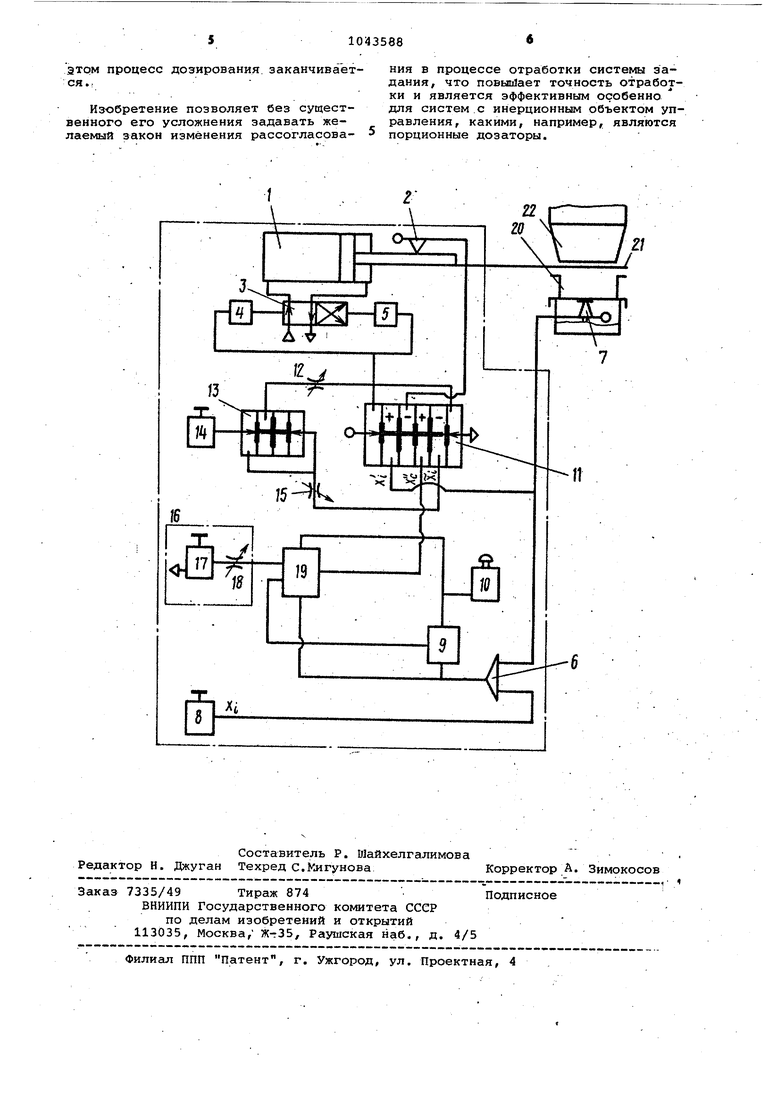
Поставленная-цель достигается тем, что в устройство дополнительно вводят задаюц1ий блок и подключенный к нему одним из вхрдо.в, коммутатор,, второй вход которого соединен с выходом -элемента памяти, первый управляющий вход с вь)ходом кнопки управления,, второй равляк) вход;- . с выходомпорогового элемент-а, авыход - с второй плюсовой камерой четырехвходово.о элемента сравнения. На чертеже изображена прин-ципиальная схема пневматического управляющего устройства. . .
I . Сущность изобретениязаключается в нейтрализации большой инерционности объекта управления з.а счет задания управляющим устройством желаемого закона изменения рассогласования. Для этого вторую положительную каме- . ру элемента сравнения соединяют с выходом задающего блока, т.е ., наряду действительным регулируемым па.раметром, который подается в первую положительную камеру элемента сравнения, вводртся, ложный регулируемый лараметр,. закон изменения которого . задается. В простейшем случае в качеств.е зад&ющего блока ложного регулируемого параметра используется .емкость второйположительной камеры элемента сравнёния, из которой че.ре;з дроссель, опоражнивается -воздух, . при эхом характер. изменения давленияв емкости при опоражнивании близок к требуемому закону изменения рас- согласования при/точном порционном дозчров-ани-и-. . ; - Устро.йство содержит пневмоцилиндр .1 с датчиком перемеще.ния 2 и подключе.нным к его полост ям воздухораспределителем 3, управляющие входы като-рого соединены с релейными усилителями ,4 и 5, включенными соответственно по схеме повторения и отрица- ,: нйя, пороговый элемент 6, один вход которого соединен с каналом параметра (сигнал X), т.е. с выходом датчика веса 7, другой вход - с задатчиком опорного сигнала 8 (сигнал Х )7 а выход - с входом включения элемента памяти 9, вход выключения которого соединен с выходом кнопки управления 10, четырехвходовой элемент сравнения 11, первая плюсовая и минусовая камеры которого соединены соответственно с каналом параметра (X Xj ) и выходным каналом датчика перемещения 2 (сигнал X ). Выход четырехвходового элемента сравнения 11 .л Z) соединен с управляющими входами релейных усили телей 4 и 5 и через первый дроссель 12 с управляющей камер.ой нормально открытого реле 13, сопло питания ко торого соединено с выходом задатчик 14, а выход нормально открытого рел (сигнал У,-) соединен через втсррой дрорсель 15 со второй минусовой камерой элемента СЕ авнения 11. Кром того,, в устройство введен задающий блок 16, состоящий, например, из за датчика 17.и регулируемого дрсзсселЯ 18, и подключенный к нему одним из входов KOMMyTaTopl, второй ВХОД которого соединен свыходом элемен памяти 9, первый управляющий вход с выходом кнопки -управления 10, втр . рой управляющий вход - с выходом порогового элемента 6, а выход (сиг .нал X) - со второй плюсовой ;каме-. .рой элемента сравнения 11. В рассматриваемой системе ее регулируемый параметр X по отношению . к следящему.приводу-1 является основной составляющей Х . задающего сигнала Х. . .. .,У х,. х; + хг t X. ,.- .. ,- I Ximax . . -X;- XJ (t); X ...b7.(t) ; . (; xj(t); I Y - Г X Tinol X jmoix jXi(t, Z); ,X v irnin где. X. - основная составляющая I задающего сигнала, . , Х.{ - ложная, составляющая задающего сигнала/ - пульсирующая составля- ющая задающего сигнала/ %J, Ji ) .. n.X.,-(t} - сс(ответственно начальное конечное и текущее -значения основной соста влят ющей х . задающего сигнаv . л|тс«| - соответственно максимаЯь j,4oe.,: минимальное и теку- и (t щее значения ложной составляющей х . задающего сигнала X,. , . .. XimcwJ соответственно максималь imitt- нов -нов, минимальное и текуи Xf (t, Z) щее значения пульсирующе щее значения пульсирующе составлякяяей X. згщающег .сигнала ,. Z - выходной сигнал с элемен та сравнения 11/ Z 1 если X.J X, в противном . случае Z 0. Устройство работает следующимобразом. . В исходном состоянии системы о( соответствует закрытому положению заслонки 21 бункера 22), Х{ xJo (поскольку тара 20 пустая), Xj Xj(память 9 включена и коммута гор 19 соединяет вторую положитель-. ную камеру элемента сравнения 11 с выходом элемента памяти 9), (поскольку 2 1). Таким образом Xfncjxi X i Х. i max - imax причем Х. поэтому присутствует команда Z 1 на закрытие заслонки 2.1. . , Предлагаемое управляющее устройство реализует условно двухрежимный алгоритм работы дозатора. Цикл набора дозы начинается с нажатия оператором кнопки 8, при этом выключается элемент памяти 9, переключается, коммутатор 19 и сигнал Х| x(t) нач.инает убывать во времени, так как втЪрая положительная кам.ера элемента сравнения 11 .через дроссель 18 соединена.с задатчиком .17, навыходе которого более низкое давление, соответствующее сигналу у V ту. .г/.чт-«у % V. ,T Kjt ХГ X-.j.,.. Как ТОЛЬКО Xj станет мень-: t(Iliril-. me X, привод 1 открывает (перемещает влево ) заслонку 21, отслеживая при этом сигнал Х. Скорость .открывания заслонки 1 зависит от ск рости убывания сигнала Х ... С .этого мо- мента в тару 20 кз бункера -22 поступает мощный поток продукта, при этом параметр X, а значит и сигнал Х;, быстро- возрастает, что вызывает также быстрое возрастание задающего сиг.нала Х; Х-+ Х, (не смотря на то, что X. продолжает, убывать) до значения,. соответствующего.закрытому пот ложению заслонки (Х.; 7/ Х.) . Заслонка 21 закрывается и нарастание зада ющегр сигнала Xj прекращается/; этом выбирается примерно 85-95% веса- дозы.и усдовно грубый режим дозирования заканчивается. Далее начинае.тся условно тоНкий режим дозирования. Задающий сигнал X начинает снова убывать, соответственно заслонка 21 начинает снова от|«Е«лваться, но уже с меньшей ско-, рость.ю, поскольку скорость убывания -. с.ягнала х к данному моменту времени, становится существенно меньшей своей первоначальной величины. В тару 20 снова начинает поступать про- . дукт, Далее заслонка 21 закрывается и описанный процесс неоднократно повторяется с той лишь разницей, что каждая последующая порция продукта, поступающая в ару 20, меньше предыдущей. После того, как X станет больше или равной X , на выходе -порогового элемента 6 появляется сигяал, включающий память 9 и переключающий коммутатор 19 на соединение выхода памяти 9 со второй положительной камерой элемента сравнения 11, и на этом процесс дозирования заканчивает ся.. Изобретение позволяет без существенного его усложнения задавать желаемый закон изменения рассогласова НИН в процессе отработки системы задания, что повышает точность отработки и является зффективным особенно для систем с инерционным объектом управления, какими, например, являются порционные дозаторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое управляющее устройство | 1976 |
|
SU684509A1 |
| Пневматический следящий привод | 1981 |
|
SU968786A1 |
| Система автоматического управления работой дозатора | 1990 |
|
SU1747309A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Устройство для программного регули-РОВАНия ТЕМпЕРАТуРы эКСТРАКТОРА | 1979 |
|
SU809105A1 |
| Пневматический регулятор | 1985 |
|
SU1262449A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1986 |
|
SU1425463A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический пропорциональный регулятор | 1978 |
|
SU746412A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
ПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕУСТРОЙСТВО, содержащее пневмоцилиндр , с датчиком перемещения и подключен- J ным к его полостям воздухораспреде-; лителем, управляющие входы которого соединены с релейными усилителями, включенными соответственно по схеме повторения и отрицания, пороговый элемент, один вход которого соединей с каналом параметра, другой вход -. с задатчиком опорного сигнала, а выход - с входом включения элемента памяти, вход выключения которого Со единен с выходом кнопки управления, Четырехвходовый элемент сравнения, ;первая плюсовая и минусовая камеры которого соединены соответственно с каналом параметра и выходным каналом датчика перемещения, выход четырехвходового элемента сравнения соединен с управляющими входами релейных усилителей и через первый дроссель - с управляющей камерой нормально-открытого реле, сопло питания которого соединено с выходом задатчи-. ка, а выход Нормально-открытого реле соединен через второй дроссель с второй минусовой камерой элемента сравнения, отличающееся , тем, что, с целью улучшения динами- i ческих характеристик устройства, в (Л него введен задающий блок и подключенный к нему одним из входов коммутатор, второй вход которого соединен с выходом элемента памяти, первый управляющий вход - с выходом кнопки управления, второй управляющий вход с выходом порогового элемента, а выход - с второй плюсовой камерой четыре хв ходового элемента сравнения. 4 ОЭ сд 00 СХ)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПНЕВМАТИЧЕСКИЙ КВАЗИОПТИМАЛЬНЫЙ РЕГУЛЯТОР | 0 |
|
SU268768A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматическое управляющее устройство | 1976 |
|
SU684509A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
