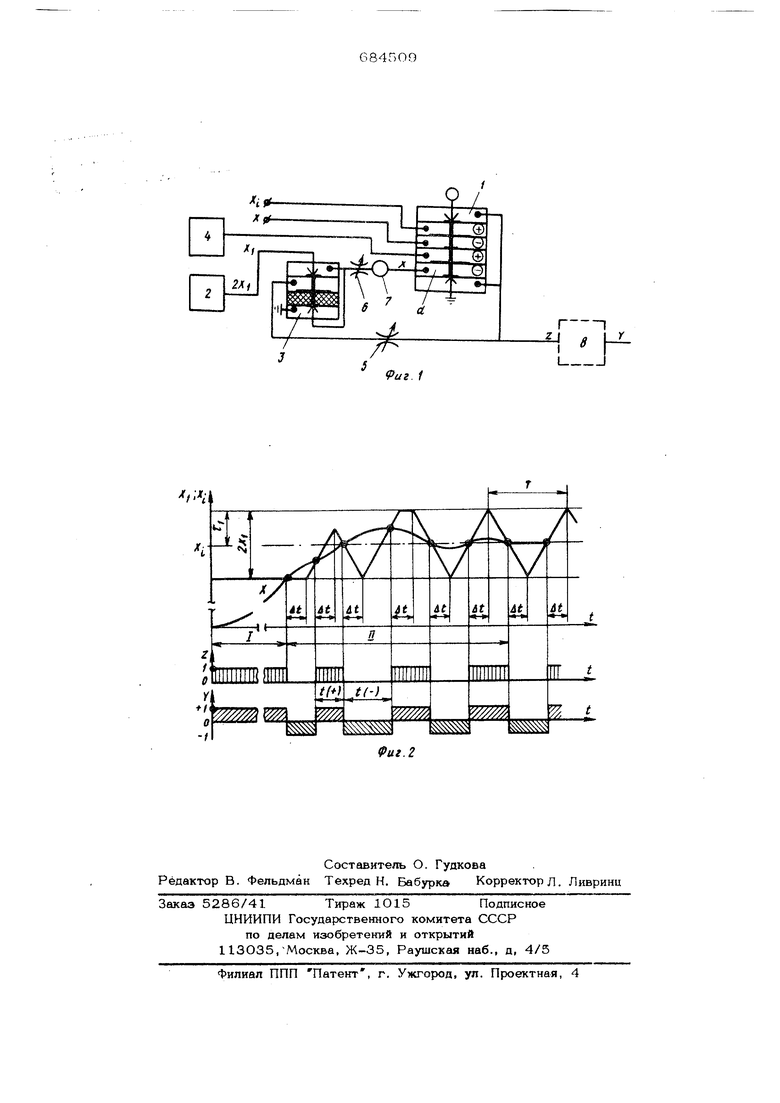
Изобретение относится к пневматическим средствам автоматического управления и может быть использовано при создании пневматических систем различного назначения, в частности пневматических систем управления позиционированием рабочих органов технологического оборудования. Известны методы повышения быстродействия пневматического регулятора с одновременным улучшением других его динамических и точностных характеристик основанные на импульсном управлении, реализуюшим режим, близкий к оптимальному. Например, существует пневматический регулятор, содержащий элемент сравнения, два четьфехвходовых сумматора, регулируемые дроссели, несколько динамических и апериодических звеньев и выходной усилитель с системой многоконтур ной обратной связи, охватываюшей устрой ство в целом и его отдельные блоки .1JПри наличии сигнала рассогласования меж ду текущим и заданным значениями регулируемого параметра регулятор генерирует управляющее воздействие в форме относительно короткой последовательности импульсов, модулированных по длительности в зависимости от вешгчины и знака рассогласования. После устранения последнего (в пределах точности регулятора) управляющее воздействие продолжает подаваться в виде симметр1гчных импульсов высокой частоты и малой амплитуды со . средним значением, соответствующим состоянию равновесия системы. Импульсный режим работы регулятора является результатом влияния обратной связи, вызывающей автоколебания. Имеющиеся в регуляторе динамические и апериодические звегшя используются для настройки регулятора на максимальное .быстродействие при отработке управляющего сигнала, причем настройка определяется таким свойством регулируемого объекта как инерционность (запаздывание). К недостаткам существующего регуляjTopa следует отнести, во-первых,зависи- 368 мость аг лтлитудьт управл$пощего воздействия и закона его модулирования по длительности импульсов от настройки регулятора, а не от действительного состояния объекта управления и его свойств. Поэтому при изменении параметров объекта приходится менять и настройку регулятора для предотвращения ухудшения качества процесса регулирования. Во-вторых, 7сонструкция регулятора достаточно сложна. В HacTHOCTHjдля суммирования сигналов в нем предусмотрены отдельные блоки (два четырехвходовых сумматора), выдающие промежуточную информацию для элемента сравнения, вьгаолненного также отдельным блоком; регулятор включает в себя большое число последовательно сраба тывающих блоков, в результате чего вся система оказывается относительно инерционной, что снижает стродействие регулятора. Наиболее близким техническим решени ем к данному является пневматическое управляющее устройство, содержащее элемент сравнения, первая плюсовая и минусовая камеры которого соединены с каналом задания и каналом параметра, выход с выходным каналом устройства, и первы задатчик опорного давления, выход которо го подключен к соплу реле 2. Динамические характеристики известного устройства неудовлетворительны при практическом его применении. Целью изобретения является повышени динамических характеристик устройства. Поставленная цель достигается гем, что в устройстве установлены первый и второй дроссели, емкость и второй эадатчик опорного давления, выход которого подключен ко второй плюсовой камере, элемента сравнения, выход которого через Первый дроссель соединен с управляющей камерой реле, включенного по схеме ДА и соединенного выходом через вто рой дроссель со вторым отрицательным входом элемента сравнения. На фиг. 1 изображена схема устройства; на фиг. 2 - график его работы. Основным элементом пневматического управляющего устройства является дискретный четырехвходовый (с двумя плюсовыми и двумя минусовыми камерами) элемент 1, вьтолняющий функции одновре менно сумматора и элемента сравнения, назьгааемый далее элементом сравнения. Первая плюсовая камера элемента сравнения 1 соединена с каналом задания х задающего устройства, а первая минусе- вая камера этого элемента - с каналом параметра X от датчика регулируемого параметра. Во вторую плюсовую камеру элемента сравнения подается сигнал к постоянного уровня, а во вторую минусовую камеруcv сигнал 2к , т.е. удвоенный сигнал X. с задатчика опорного давления 2, выход которого подключен к соплу реле 3. Сигнал подается с задатчика 4. Выход элемеггга 1 через гроссель 5 соединен с управляющей камерой реле 3, включенного по схеме ДА, а выход реле 3 соединен через дроссель 6 и емкость 7 со вторым отрицательным входом элемента сравнения. На выходе регулятора установлен логический блок-усилитель 8. Регулируемые дроссе.пи 5 и 6, а также емкость 7 выбираются и настра-иваются таким образом, чтобы время сраба- тьтания реле 3 при изменении его управляющего входного сигнала составляло половину вр« /1ени наполнения (опоражнивания) емкости 7. Устройство работает следующим образом. При af - Ж tвьшолняется условие Х -f-x X -t-X , где К- - сигнал, поступающий на второй отрицательный вход элемента сравнения 1. На выходе элемента сравнения 1 устанавливается сигнал Z 1, под действием, оторого нормально открытое реле 3 про- пускает сигнал 2 х, во вторую минусовую камеру элемента сравнения 1, т.е. имеетл 2Х(. При х -X Xf вьшолняется условие , ,ина выходе элемента сравнения 1 устанавливается сигнал . В результате этого нормально открытое реле 3 сообщает камеру оС элемента сравнения 1 с атмосферой, при этомХ 0. При малых рассогласованиях, когда }У. ; , возможно выполнение условий .1 -f X. , так , , В последнем случае на выходе элемента сравнения 1 появляется сигнал Z О, через время At срабатывает нормально открытое реле 3, сообщая вторую минусовую камеру элемента сравнения 1 с атмосферой, и давление в указанной камеру начинает падать (сигнал Х. уменьшает он). Поскольку скорость изменения сигнала X. выше скорости изменения регулируемого параметра х , то через некоторое время оказывается s;+ х ХФХ , что приводит к срабатыванию элемента сравнения 1 и появлению на его выходе сигнаж 7. 1. Далее процесс повторяется, и на выходе элемента сравнения 1 появляется цепочка импульсов Z(t) переменной длительности t (фиг. 2) После их преобразования в выходном логическом блоке-усилителе 8 на выходе регулятора образуется управляющее воздействие в форме последовательности импульсов разных знаков, модулированных по длительности (скважности), что позволяет характеризовать интенсивность управляющего воздействия величиной игЧ-1 причем у О, если х;- х 7О ; -О при О при X J - X О. Таким образом, сигнал X , поступающий в камеру А .элемента сравнения 1, при)ч. равен O, 2ч в зависимости от знака рассогласоваштя Х{ - X , а при Ixi - X I -с X, сигнал X изменяется за время At от О до 2 х, после переключения элемента сравнения 1 с Z 0 ра Z l и изменяется также за время д1 от 2 XI до О после переключений элемента сравнения 1с Z. l на Z 0. В соответствии с этим предлагаемый регулятор реализует два режима работы, автоматически переходящие OZUIH в другой в моменты, когда х ; - X принимает значение х , причем,если|х-, (фиг. 2), то реализуется режим 1, в котором сигнал с выхода регулятора удержи вается на постоянном максимальном уров не, обеспечивая уменьщение рассогласова ния с максимальной эффективностью; в ре жиме М , реализуемом при малых отклоХ) от х((х-,-ХК.Х,) ной сигнал регулятора принимает форму импульсов разных знаков, модулированны по скважности (щиротно-импульсная моду ляция) в зависимости от величины и знак рассогласования Х - х , благодаря че выход му достигается высокая точность отработки регулятором задающего сигнала х, . Из рассмотренного выше следует, что импульсная двухрежимная работа предлагаемого пневмат1гческого регулятора реализуется при минимальном количестве элементов в конструкции, причем этими элементами служат стандартные элементы, входящие в систему УСЭППА. Один четырехвходовый элемент сравнения, нормально открытое реле, два дросселя и емкость вьшолняют крюме своих основных функций .также фушсции сумьмтора, генератора тактовых импульсов, щ.фотно- 1мпульсного модулятора и автомат1тческого переключателя режимов работы регулятора. Формула изобретения Пневматическое управляющее устройство, содержащее.элемент сравнения, первые плюсовая и минусовая камеры которюго соединены с каналом задания и каналом параметра, выход - с выходным каналом устройства, и первый задатч1ж опорного давления, выход которого подключен к соплу реле, отличающеес я тем, что, с целью улучшения динамических характеристик стройства, в нем установлены первый и второй дроссели, емкость и второй задатчдпс опорного давления, выход которого подключен ко второй плюсовой камере элемента сравнения, выход которого через первый дроссель соединенс управляющей камерой реле, включенного по схеме ДА и соединенного выходом через второй дроссель со вторым отрицательным входом элемента сравнения. Источники информации, принятые во внимание при экспертизе 1.Авторское св1-щ.етельство СССР № 268768, кл. G ОБ В И/44, 1969. 2.Инструкция по эксплуатации регулятора с зоной He4jBCTBirreHbHOCTn ПР2,6, М., Тизприбор, 1972.
Риг. 1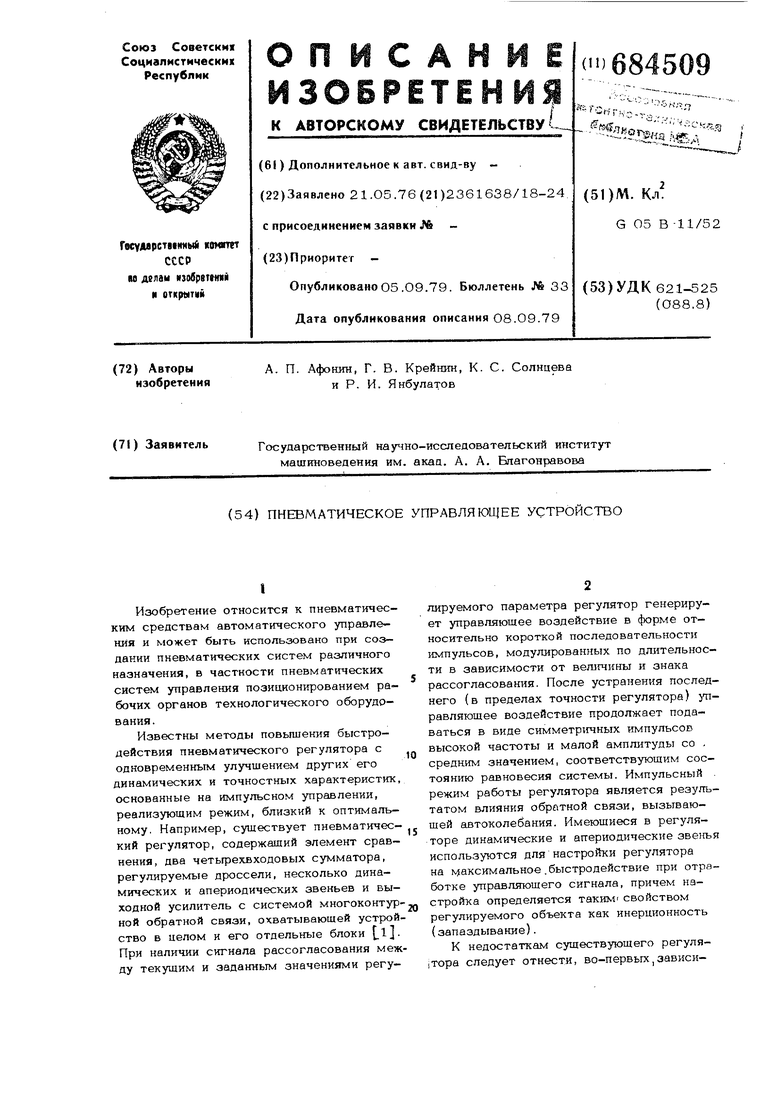
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое управляющее устройство | 1982 |
|
SU1043588A1 |
| Пневматический следящий привод | 1981 |
|
SU968786A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический позиционный регулятор | 1979 |
|
SU903806A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Пневматический двухпозиционный регулятор | 1986 |
|
SU1409970A1 |
| Пневматическое устройство управления | 1976 |
|
SU632987A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU622046A1 |