2. Устройство по П.1, о т л и ч аю щ е е с я- тем, что, блок управления содержит последовательно соединенные регулятор, магнитный пускатель
и электродвигатель, выход которого является выходом блока, а первый и второй входы регулятора являются первым и вторым входами блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования систем управления | 1980 |
|
SU1092534A2 |
| Тренажер оператора систем управления технологическими процессами | 1983 |
|
SU1208571A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ | 2005 |
|
RU2295151C2 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1990 |
|
RU2047909C1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
1.. УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ, содержащее преобразователь угла в напряжение, первь1й масштабирующий блок, выход г которого связан с первым входом блока управления, выход которого соединен с входом преобразователя угла в напряжение, а второй вход блока управления является входом устройства, отличающееся тем, что, с целью повышения точности моделирования, в него дополнительно введены масштабирующие блоки, блоки сравнения, интегратор и блок запаздывания, причем входы второго и третьего масштабирующих блоков явля(ртся входами устройства, выход второго масштабирующего блока соединен с первым входом первого блока сравнения, выход которого через последовательно включенные интегратор и блок запаздываi ния соединен с первым входом второго блока сравнения, второй вход кото(Л рого подключен к выходу; третьего масштабирующего блока, а выход второго блока сравнения соединен с входом первого масштабирующего блока, а вы- д ход преобразователя угла в напряже- ci ние соединен с вторым входом первого блока сравнения. N; Г 00 оь 00 сх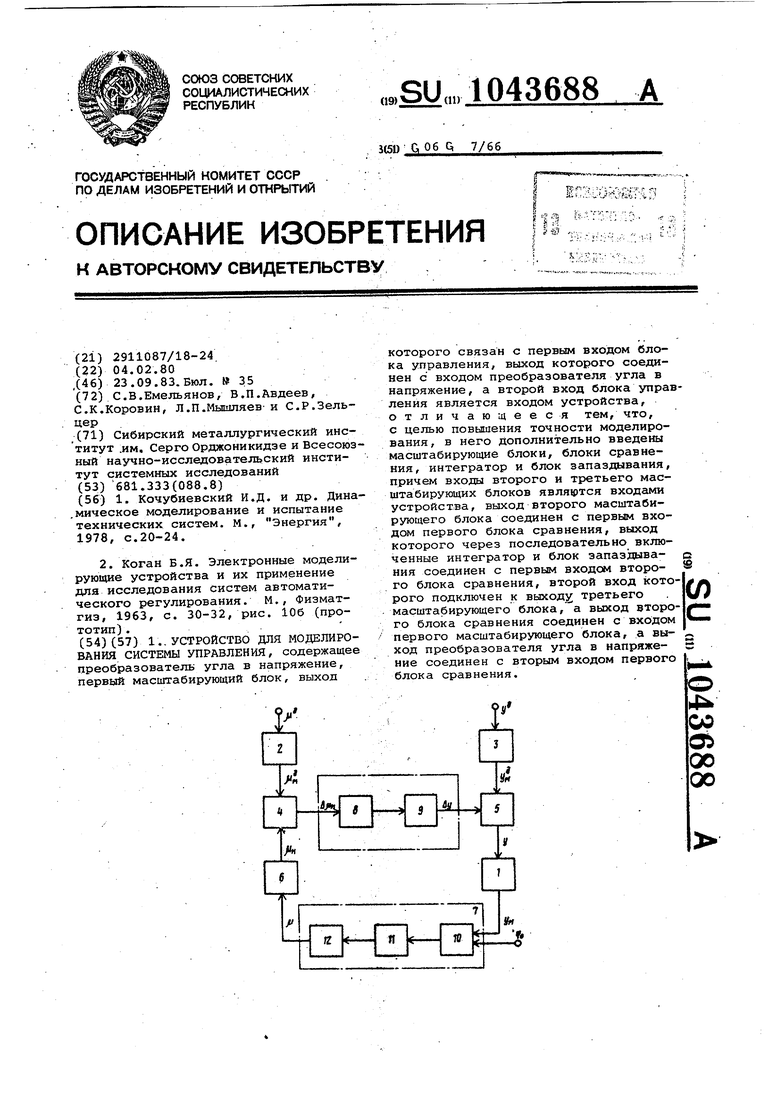
Изобретение относится к автоматическому управлению и регулирований и может быть использовано для испытания регулирующих и управляющих систем,, например автоматических ре- , гуляторов.
: Известны моделирующие установки/
в которых для .замещения натурных блоков используются их полные адекват- ные модели fl7.
Однако построение и воспроизведение таких моделей зачастую связано со значительными трудностями и большими затратами, что приводит к ухудшению эффективности моделирования. Наиболее близкой по технической СУ1ЦНОСТИ к предлагаемой является моделирующая установка, включающая модель объ-екта-, реализованную на аналоговой вычислительной машине, первое и второе преобразующее устройство, например, электромеханические преобразователи, и аппаратуру регулирования 2.
Недостаток известной моделирующей установки заключается в большой трудности построения и реализации адекватных полных моделей объекта, а применение неадекватных моделей объекта приводит к снижению эффективности моделирования из-за несоответствия получаемых при моделировании результатов реальным (натурным) условиям.
.ельго изобретения является повышение точности моделирования за счет упрощения процедур построения и реализации моделей объекта.
. Поставленная цель достигается тем, что в устройство для моделирования системы управления, содержащее преобразователь угла в напряжение, первый масштабирующий блок, выход которого связан с первым входом блока управления, выход которого соеинен со входом преобразователя угла в напряжение, а второй вход блока управления является входом устойства, дополнительно введены мастабирующие блоки, блоки сравнения, интегратор и блок запаздывания, прием входы второго и третьего масштабирующих блоков являются входами устройства, выход второго масштабиующвго блока соединен с первым вхоом первого блока сравнения, выход
. г
которого через последовательно включенные интегратор и блок запаздывания соединен с первым входом вторс5го блока сравнения, второй вхо которого подключен к выходу третьего масштабирующего блока, а выход второго блока сравнения соединен со входом первого масштабирующего блока, а выход преобразователя угла в напряжение соединен со вторым входо второго блока сравнения.
Блок управления содержит последовательно соединенные регулятор, магнитный пускатель и электродвигатель, выход которого является выхо. дом блока, а первый и второй входы регулятора являются первым и вторым входами блока.
На чертеже представлена функциональная схема устройства.
Предлагаемое устройство содержит первый масштабирующий блок 1, второй -и третий масштабирующие блоки 2 и 3, первый блок 4 сравнения, второй блок 5 сравнения, преобразователь б угла в напряжение выполненный, в виде реостатного датчика, блок 7 управления, интегратор 8 и блок 9 запаздывания, образущие модель объекта управления в приращениях, регулятор 10, магнитный пускатель 11 и электродвигатель 12.
Модель объекта в приращениях в совокупности с натурными сигналами об управляющих и выходных переменных позволяет воспроизводить режимы работы объекта с исследуемой аппаратурой регулирования и при это нет необходимости в полных адекв атных моделях объекта и внешних возмущений /( Ч - действительные управляющие и выходные сигналы натурального объекта; /и , Н -, отмасштабированные по величине значения этих же сигналов; /и. , Ч моделируемые управления и выходы; f I л преобразованные сигналы о моделируемых управлениях и выходах,Л M., Д Ч - приращения сигналов управления и выхода , Ч сигнал о заданном значении величины объекта управления.
Устройство работает следующим образом.
Исследуемый регулятор 10 вырабатывает управляющее воздействие f как реакцию на выход % моделируе .мой системы и задание на этот выход. Управление подается через магритный усилитель 11 на элект ролвигатель 12, выходной вал которо го механически связан с движком реостатного даа-чика преобразователя. 6. Последний преобразует угол поворота вала электродвигателя 12 в электрический сигнал Д/ц / который поступает на второй вход первого блока .4 сравнения. Действительный управляющий , поступающий оперативно с объекта управления или зарегистрированный и воспроизводимый в требу MOM масштабе времени, подается на вход второго масштабирующего блока в котором изменяется величина этог Сигнала. С выхода второго масштабй рующего блока 2 сигнал /и. поступа ет на первый вход первого блока 4 сравнения, где из него вычитается .сигнал /и-д,. Полученная разность Л поступает на модель объекта в при.ращениях с передаточной функцией W(p)
где k - коэффициент усиления, О V время инерции, Т - чистое запаздывание. Полученный на выходе модели сигнал л Ч подается на второй вход второго блока 5 сравнения. 5 Действительный выходной сигнал ЧЛ поступающий оперативно с объекта управления или зарегистрированный и воспроизводимый в требуемом масштабе времени, подается на вход третьего масштабирующего блока 3, в котором изменяется его вели30 ((t-e)-/ic(t-6),,
в котором модель объекта в приращениях.
. Использование моделей объекта в 35 приращениях в сочетании с натурными сигналами об управлениях, и вькодах
объекта позволяет обходиться относи- . тельно простыми моделями объекта и повысить точность моделирования за 4Q счет упрощения процедур построения и реализации моделей объекта. чина. С выхода блока 3 сигнал У поступает на первый вход третьего блока 5 сравнения/ где из него вычитается сигнал 4V. Полученный в третьем блоке 5 сравнения сигнал Ч 4 -dW является моделируекшм выходным сигналом. С выхода третьего блика 5 сравнения выходной моделируе№ай сигнал поступает на вход первого масштабирующего блока 1, где изменяется величина этого сигнала. С выхода блока 1 отмасштабированный сигнал поступает на испытываемый регулятор 10 блока 7 управления.. Таким образом, изменение выходного сигнала У в моделируемой систег ме неизбежно вызывает .изменение реакции блока 7 управления, что в свою очередь, приводит к изменению выходного сигнала f под действием управляющего сигнала fj, . Процесс моделирования продолжается до тех пор, пока не будет накоплен материал, достаточный для исследования регулято.ра 10. Процесс моделирования можно описать следующим выражением; г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кочубиевский И.Д | |||
| и др | |||
| Дина.мическое моделирование и испытание технических систем | |||
| М., Энергия, 1978, с.20-24 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коган В.Я | |||
| Электронные моделирующие устройства и их применение для исследования систем автоматического регулирования | |||
| М., Физматгиз, 1963, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Светоэлектрический измеритель длин и площадей | 1919 |
|
SU106A1 |
