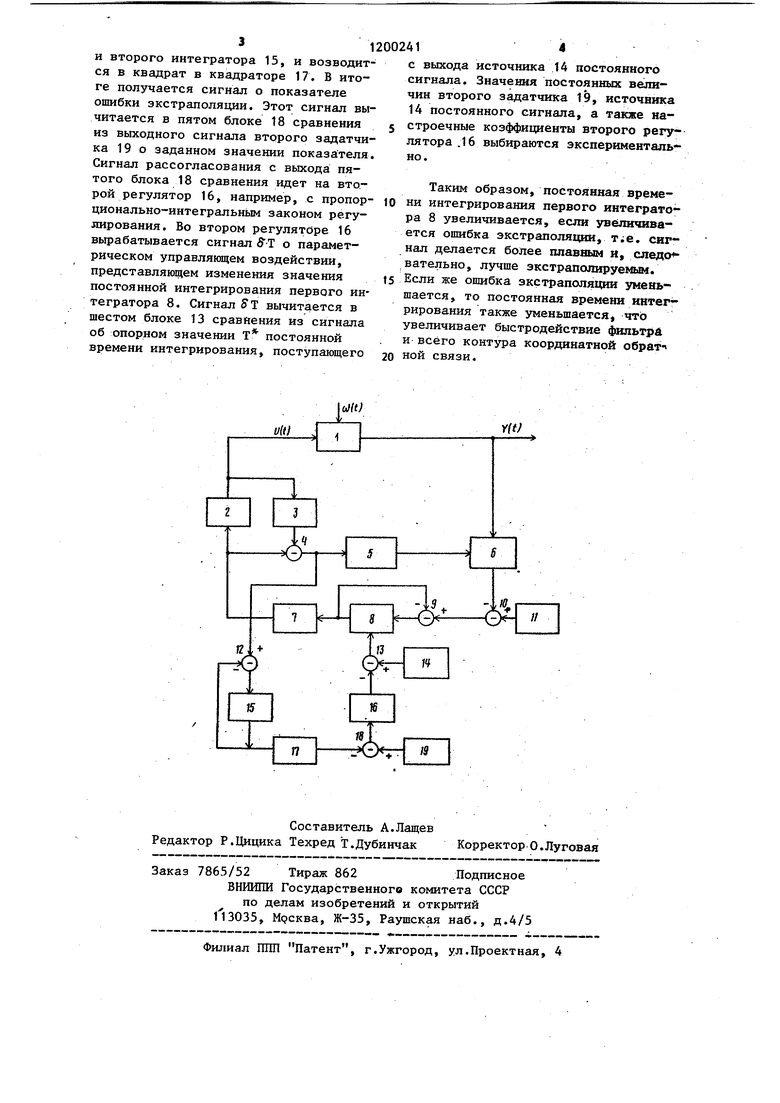
Изобретение относится кавтоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых возмущений. Динамика объекта по каналам регулирования в ограниченном диапазоне приращений к фактическому режиму управления описывается передаточной функцией W(p) |{El е- Wo(p)e- . (1) в которой L(p) и М(р) - полиномы от р, причем степень полинома Ь(р) не превьшает степень полинома М(р)}Т время запаздьшания. Характеристики возмущений существенно изменяются на интервале длительности . Задача управления, заключается в обеспечении инвариантности выходной величины объекта от неконтролируемых возмущений. Цель изобретения - повышение точности системы. На чертеже представлена блок-схема системы управления объектом с запаздыванием. На чертеже приняты обозначения: U(t) - управляющее воздействие в t-й момент времени; Y(t) - выходная величина (сигнал) объекта управления W(t) - неконтролируемое возмущение. Система управления содержит объект 1 управления, зкстраполятор 2, блок 3 задержки, третий блок 4 сравнения, модель 5 объекта запаздьшания сумматор 6, первый регулятор 7, первый интегратор 8, второй блок 9 сравнения, первьй блок 10 сравнения первый задатчик 11, четвертый блок 12 сравнения, шестой блок 13 сравнения, источник 14 постоянного сигнала, второй интегратор 15, второй регулятор 16, квадратор 17, пятый блок 18 сравнения, второй задатчик 19-. Модель 5 объекта без запаздьгоания может быть представлена, например, в виде последовательного соединения инерционных звеньев. Первый 7 и второй 16 регуляторы, в частности, с пропорционально-интегральным законом регулирования, реализованы в виде параллельного соединения интегратора и масготабируняцего блока. Экстраполятор 2 представлен реальным фор сирующим звеном. Система управления объектом с запаздьшанием работает следующим образом. Выходной сигнал Y объекта управления алгебраически суммируется в. сумматоре 6 с выходным сигналом модели 5 объекта без запаздывания, в результате чего получается сигнал Y о натурно-модельном выходе, которьй вычитается в первом блоке 10 сравнения из сигнала Y о заданном значении выходной величины, поступающего с задатчика 11. Сигнал об ошибке регулирования поступает на фильтр низкой частоты, реализованнь й с помощью второго блока 9 сравнения и первого интегратора 8, где вьщеляется низкочастотная составляющая сигнала 8у, идущая на первый регулятор 7. Первьм регулятором 7 вырабатывается управляющее воздействие: U(t)ky .Sy(t)(t)dt, (2) где k р и Т„ - настроечные коэффициенты . Управляющее воздействие U является образцовым (требуемым) на момент времени (t-t), поэтому оно экстраполируется на время t в экстраполяторе 2 и подается для реализации на объект 1 управления. Выходной сигнал экстраполятора 2 задерживается на время i в блоке 3 задержки и затем вычитается в третьем блоке 4 сравнения из выходного сигнала U первого регулятора 7 . На выходе третьего блока 4 сравнения получается сигнал об ошибке экстраполяции, который пересчитывается в модели 5 объекта управления и приращения выходцого сигнала, поступающего на сумматор 6. Описанные блоки системы управления с второго по одиннадцатый образуют координатную обратную связь. Остальные блоки с двенадцатого по девятнадцатьй составляют контур параметрической обратной связи, предназначенный для регулирования характеристик первого интегратора с целью получения хорошо экстраполируемого выходного сигнала первого регулятора 7. Для этого сигнал S об ошибке экстраполяции сглаживается вторым фильтром низкой частоты, реализованным с помощью четвертого блока 12 сравнения 31 и второго интегратора 15, и возводится в квадрат в квадраторе 17, В итоге получается сигнал о показателе ошибки зкстраполяции. Этот сигнал вычитается в пятом блоке 18 сравнения из выходного сигнала второго задатчика 19 о заданном значении показателя Сигнал рассогласования с выхода пятого блока 18 сравнения идет на второй регулятор 16, например, с пропорционально-интегральнЫм законом регулирования. Во втором регуляторе 16 вырабатывается сигнал &-Т о параметрическом управляющем воздействии, представляющем изменения значения постоянной интегрирования первого ин тегратора 8. Сигнал 5 Т вычитается в шестом блоке 13 сравнения из сигнала об :опорном значении Т постоянной времени интегрирования, поступающего 41 с выхода источника 14 постоянного сигнала. Значения постоянных величин второго задатчика 19, источника 14 постоянного сигнала, а также настроечные коэффициенты второго регулятора .16 выбираются экспериментально. Таким образом, постоянная времени интегрирования первого интегратора 8 увеличивается, если увеличивается ошибка экстраполяхщи, т;е, сигнал делается более плавным и, следо вательно, лучше экстраполируемым. Если же ошибка экстраполяции уменьшается, то постоянная времени интегг рирования также уменьшается, чтб увеличивает быстродействие фильтрд и всего контура координатной обрат- ной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1985 |
|
SU1285430A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для настройки системы управления | 1988 |
|
SU1515145A1 |
| Регулятор | 1980 |
|
SU855607A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ, содержащая объект управления, первый задатчик, последовательно включенные сумматор, первый блок сравнения, второй блок сравнения, первый интегратор, первьш регулятор, экстраполятор, блок задержки, третий блок сравнения и модель объекта без запаздывания, подключенная выходом к первому входу сумматора, второй вход которого соединен с выходом объекта управления, причем выход первого задатчика подключен к второму входу первого блока сравнения j выход первого интегратора - к второму входу второго блока сравнения, выход первого регулятора - к второму входу третьего блока сравнения, выход экстраполятора - к в-ходу объекта управления, отличающаяся тем, что, с целью повьшения точности системы, в нее введены второй задатчик, источник постоянного сигнала, последовательно включенные четвертый блок сравнения, второй интегратор, I квадратор, пятый блок сравнения, второй регулятор и шестой блок сравсл нения, выход которого соединен с с дополнительным входом первого интегратора, а второй вход - с выходом источника постоянного сигнала, выход второго задатчика подключен к второму входу пятого блока сравнения, перю вый вход четвертого блока сравнения соединен с выходом третьего блока сравнения, а второй вход - с выходом второго интегратора. 4
| Турецкий X | |||
| Анализ и синтез систем управления с запаздыванием | |||
| М.: Машиностроение, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
