(54) РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивный измеритель расхода сыпучих материалов | 1981 |
|
SU1044986A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
Изобретение относится к автоматике и может быть использовано для построения систем регулирования техническими объектами, характеристики каналов регулирования которых изменяются незначительно; а структурно-г статические свойства неконтролируемых возмущений претерпевают с течением времени существенные изменения.
Известен регулятор, содержащий последовательно соединенные первый блок сравнения, фильтр низкой частоты, пропорционально-интегральный блок (регулятор), второй блок сравнения, модель объекта регулирования и первый сумматор, выход которого соединен с входом первого блока сравнения, последовательно соединенные экстраполятор и блок задержки, причем вход экстраполятора соединен с выходом,пропорционально-интегрального блока, выход блока задержки с входом второго блока сравнения, на один из входов сумматора подается измеряемый сигнал регулируемой координаты, заданный сигнал подается на один из входов первого блока сравнения, выход экстраполятора является выходом регулятора t1.
Недостаток этого регулятора заключается в невысокой точности регулирования вследствие того, что структурно-статические свойства неконтролируемых возмущений изменяются, а структура и пареилетры регул тора остаются неизменными, выбранными в ориентации на определенные свойства возмущений
10
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее первую К вторую модели объекта, выходами соединенные соответственно, с первыми
15 входами первого и второго сумматоров, фильтры низкой частоты, первый вход и выход первого фильтра низкой частоты подключены соответственно к выходу первого блока сравнения и .
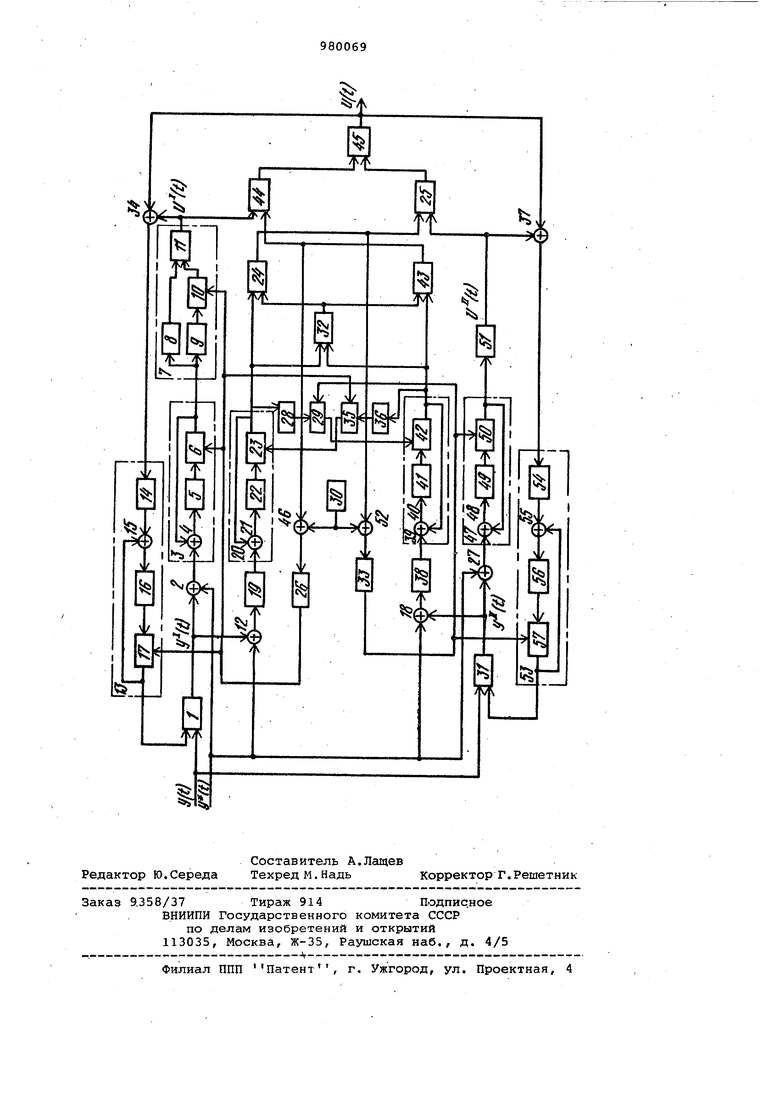
20 первому входу первого регулятора, первые входы второго и третьего фильтров НИЗКОЙ частоты соединены соответственно через первый и второй квадраторы с выходами второго и тре25тьего блоков сравнения, а выходы с первым и вторым входами третьего сумматора, первый вход четвертого фильтра низкой частоты подключен к выходу четвертого блока сравне30ния, выход первого регулятора соединеН с первьам входом пятого блока сравнения, первый вход шестого блока сравнения подключен через второй регулятор к выходу четвертого фильт ра низкой частоты, а выходы пятого и шестого блоков с1Ьавнения соедииены соответственно с первыми входа ми первой и второй моделей объекта, вторые входы первого и второго сумм торов подключены к первому входу устройства, выход первого сумматора к первым входам первого и второго блоков сравнения, а выход второго сумматора - к первым входам третьего и четвертого блоков сравнения, вторые входы первого, второго, третьего и четвертого блоков сравнения соединены с вторым входом устройства, первый и второй входы третьего сумматора соединены соответст венно с первыми входами первого и второго блоков деления, а выход с вторыми входами первого и второго блоков деления, первый и второй бло ки умножения, первые входы которых соединены соответственно с выходами первого и второго блоков деления, вторые входы - с первыми входами шестого и пятого блоков сравнения, а выходы - с первым и вторым входам четвертого сумматора, выход которог подключен к вторым входам пятого и шестого блоков сравнения 2. Недостаток этого регулирующего устройства заключается в невысокой точности регулирования, обусловленной тем, что при неэффективной работе одного из контуров моделирования снижается качество, регулировани всего регулятора. Плохая работа одного из контуров может быть вызвана например резкими изменениями неконт ролируемых возмущений,которые могу привести к нежелательным изменениям режима работы одного из модельных контуров регулирования. Цель изобретения - повышение точ ности устройства. Указанная цель достигается тем, что в регулирующее устройство введены первое и второе реле, первый и второй ключи, первый и второй мас штабирующие блоки, блок задания и седьмой и восьмой блоки сравнения, первые входы, которых подключены к блоку задания, вторые входы - соответственно к выходам второго и,первого блоков деления, выход второго фильтра низкой частоты соединен через первый масштабирующий блок с первым входом первого ключа, выход которого подключен к второму входу третьего фильтра низкой частоты, выход последнего соединен через вто рой масштабирующий блок с первым вх дом второго ключа, выход которого подключен к второму входу второго , фильтра низкой частоты, выход седьмого блока Ьравнения соединен через первое реле с вторыми входами первой модели объекта, первого фильтра низкой частоты, первого регулятора и второго ключа, а выход восьмого блока сравнения соединен через второе реле с вторыми входами второй модели объекта, четвертого фильтра низкой частоты и первого ключа. На чертеже приведена функциональная схема предлагаемого регулирующего устройства. Устройство содержит первый сумматор 1, первый блок 2 сравнение, первый фильтр 3 низкой частоты, содержащий блок 4 сравнения, усилитель 5 с насыщением, интегратор 6, первый регулятор 7, содержащий 1ласштабкрующие блоки 8 и 9, интегратор 10 и сумматор 11, второй блок 12 сравнения. Первая модель 13 объекта, содержит блок 14 задержки, блок 15 сравнения, масштабирующий блок 16 и интегратор 17, третий блок 18 сравнения, первый квадратор 19, второй фильтр 20 низкой частоты, содержащий блок 21 сравнения, усилитель 22 с насыщением, и интеггэатор 23, первый блок 24 деления, первый блок 25 умножения, первое реле 26, четвертый блок 27 сравнения, первый масштабирующий блок 28, первый ключ 29, блок 30 задания, второй сумматор 31, третий сумматор 32, второе реле 33, пятый блок 34 сравнения, второй ключ 35, второй масштабирующий блок 36, шестой блок 37 сравнения, второй квадратор 38, третий фильтр 39низкой частоты, содержащий блок 40сравнения, усилитель 41 с насыщением, и интегратор 42, второй блок 43 деления, второй блок 44 умножения, четвертый сумматор 45, седьмой блок 46 сравнения, четвертый фильтр 47 низкой частоты, содержащий блок 48 сравнения, усилитель 49 с насыщением и интегратор 50, второй регулятор 51, восьмой блок 52 сравнения. Вторая модель 53 объекта содержит блок 54 задержки, блок 55 сравнения, масштабирующий блок 56, интегратор 57, измеряемый выходной сигнал объекта регулирования (регулируемая координата в момент времени t Y(t), заданный сигнал (задание на регулируемую координату) Y(t) , выходные сигналы соответственно первого и второго модельных контуров регулирования ) и Y.l(t) , натуральный управляющий сигнал U(t), управляющие сигналы соответственно первого и второго модельных контуров регулирования U (t) и ui(t) . Устройство работает следующим образом. В первом модельном контуре регулирования, состоящем из первого сум матора 1, первого блока 2 сравнения первого фильтра 3 низкой частоты, первого регулятора 7, пятого блока 34 сравнения, и первой модели 13 объекта, вырабатЕлвается сигнал о пе вом молельном управлении U(t). Для этого ВЫХОДНОЙ сигнал Y(t) объекта управления в первом сумматоре 1 сум мируется с выходным сигналом первой модели 13 объекта регулирования. В результате на выходе первого суммато ра 1 получается выходной сигнал первого модельного контура регулирования. Сигнал Y(t) поступает на первый блок 2 сравнения, где из него вычитается заданный сигнал Y(t). Полученный сигнал об ошибке регулирования подается на первый фильтр 3 низкой частоты, который предназначен для подавления высокочастотной составляющей сигнала, что повышает точность его дальнейшего преобразован Первый фильтр 3 низкой частоты работает следующим образом. Сигнал об ошибке регулирования с выхода первого блока 2 сравнения сравнивается с выходным сигналом интегратора б в блоке 4 сравнения. Полученный сигнал усиливается в уси лителе 5 с насыщением и накапливается в интеграторе б. Усилитель 5 с насыщением позволяет избавиться о отдельных больших изменений (выбросов) сигнала об ошибке регулирования. Выход интегратора б является.вы ходом фильтра 3 низкой частоты. С выхода интегратора 6 сигнал о сглаженном значении ошибки регулирования поступает на первый регулятор 7 например с пропорционально-интегральным законом регулирования - г U t;-f;pAYtt) a(t)dlt, , . где kp, Ки и Ти -настроечные пара метры регулятора;. AY(t) -сглаженное значени ошибки регулирован на момент времени Первый регулятор 7 реализуется/ например с Помощью масштабируквдего блока 8, последовательно соединенны масштабирующего блока 9, интегратора 10 и сумматора 11, второй вход которого через масштабирующий блок 8 соединен с выходом интегратора 6 первого фильтра 3 низкой частоты. Первый регулятор 7 работает следующим образом. Сглаженное значение ошибки регул рования u(t) умножается в.масштабирукяцих блоках 9 и 8 на соответству щие коэффициенты k и kp. Далее сигнал с выхода масштабирующего бло ка 9 интегрируется в интеграторе IG и суммируется с выходным сигналом масштабирующего блока 8 в пятом сумматоре 11. На выходе пятого сумматора получается сигнал об управлении первого модельного контура U(t). Из сигнала U(t) в пятсмл блоке 34 сравнения вычитается сигнал U(t.) о натуральном управляющем воздействии на сигнал о полученной разности поступает на вход первой модели 13 объекта регулирования с передаточной функцией, например вида W( Р ) где К - коэффициент передачи объекта; Т и t --постоянные времени. Сигнал о разности 0(t) и U(t) задерживается в блоке 14 задержки первой модели 13 объекта на время , далее сравнивается с выходным сигналом интегратора 17 в блоке 15 сравнения, умножается на коэффициент К в масштабирующем блоке 16 и накапливается в интеграторе 17. Выходной сигнал интегратора 17 является выходным сигналом первой модели 13 объекта. Таким образом, выходной сигнал определяется по выражению Y(t)YCt) W(P)).U(tn , в котором используются натуральные выходные Y(t) и управляющие U(t) сигналы и модель объекта регулирования . Аналогичным образом работает второй модельный контур, составленный из второго сумматора 31, четвертого блока 27 сравнения, четвертого фильтра 47 низкой частоты, второго регулятора 51, ндпример с пропорциональным законом регулирования, шестоrov блока 37 сравнения и второй модели 53 объекта. Этот контур по сравнению с первым модельным контуром имеет большее быстродействие, так как в нем реализован пропорциональный регулятор. Четвертый фильтр 47 низкой частоты является также более быстродействующим. Для оценки эффективности модельных контуров регулирования во втором блоке 12 сравнения из выходного сигнала Y(t) первого модельного контура регулирования вычитается заданный сигнал Y(t). Сигнал о полученной ошибке регулирования возводится в квадрат в первом квадраторе 19 и поступает на вход второго фильтра 20 низкой частоты для получения оценки текущего значения дисперсии ошибки регулирования D(t). Второй фильтр 20 низкой частоты работает аналогично первому фильтру 3 низкой частоты. . .
То-чно также с помощью третьего блока 18 сравнения, второго квадратора 38 и третьего фильтра 39 .низкой частоты оценивается текущая дисперсия (t) ошибки регулирования второго модельного контура регулирования.
На основе.управляющих сигналов U(t), Ui(t) и дисперсий Di(t), D-(t) ошибок регулирования первого и второго модельных контуров регулирования, вырабатывается натурное управляющее воздействие U(t), в частности путем взвешенного суммирования U--(t) и ui,(t) , Для этого предварительно рассчитываются весовые коэффициенты. Делается это следующим образом.
На входы третьего сумматора 32 поступают сигналы о D;(t) и D(t) с выходов второго и третьего фильтров 20 и 39 низкой частоты. Сигнал о полученной сумме подается на выхода первого и второго блоков 24 и 43 деления. На вход первого блока
24деления подается также сигнал о D(t), а на.вход .второго блока 43 деления - D-(t), На выходе первого блока 24 деления получается сигнал о весовом коэффициенте ci3(t) при управляющем воздействии U(ti , а на выходе второго блока деления 43 о весовом коэффициенте ) при управляющем воздействии Ul(t).
сигнал о o6-(t) с выхода второго блока 43 деления подается на один из входов второго блока 44 умножения - на другой вход которого постпает сигнал о U(t) с выхода первог регулятора 7. На вход первого блока
25умножения подаются сигналы oLU (t) с первого блока 24 деления и u(t) с второго регулятора 51. Выходные сигналы первого и второго блоков
25 и 44 умножения суммируются в четвертом сумматоре 45 и в результате получается сигнал о натуральном управлении
(jcU--df(i:)-u(t}+d-(),
,,
Сигнал о нату.ральном управляющем водействии U(t) подается на входы пяд-ого и шестого блоков .34 и 37 сравнения и на объект регулирования.
При неэффективной работе одного из КОНТУ.РОВ, когда d (t) . или .oi (t) меньше заданной величины об, равной, в частности 0,2 необходимо для улучшения качества регулирования сменить режим работы неэффективно
работающего модельного контура регулирования. Для этого сигналы о весовых коэффициентах dL (t) их ot- (t) с выходов первого и второго блоков 24 и 43 деления сравнив.аются в седьмом и восьмом блоках 46 и 52 сравнения соответственно с заданной величиной oL. Если, например otU (t) меньше заданной величины, то с выхода второго реле 33 сигнал 0 поступает на вторые входы интегра- „. торов 50 и 57 соответственно четвертого фильтра 47 низкой частоты и второй модели 53 объекта. В результате дальнейшее интегрирование нач-и5 нается с заданного начального значения сигнала, например с нуля. Сигнал с выхода второго реле 33 поступает на первый ключ 29 и величина oMt) умноженная на заданный коэф0. фициент, например 1,5 в первом масштабирующем блоке 28 поступает в интегратор 42 третьего фильтра 39 низкой частоты в качестве заданного начального значения сигнала. Таким об5 разомг второй модельный контур начинает работу с новых начальных условий соответствующих натурному режиму управления. Аналогично если ) меньше cL, то по сигналу первого реЛе 26 меняются на.чальные условия интеграторов 6, 10 и 17 соответственно первого фильтра 3 низкой частоты, первого регулятора 7 и первой модели 13 объекта. 5 Сигнал о выходе первого реле 26 вызывает замыкание второго ключа 35 и сигнал D-i (t) умноженный, например на коэффициент 1,5 во втором масштабирующем блоке 36 поступает в качестве начального значения в интегратор 23 второго фильтра 20 низкой частоты.
В результате в неэффективно работающий контур вводятся новые на5 .чальные условия; что позволяет устранить эффекты отрицательных управляющих воздействий.
Использование предлагаемого изоб ретения дает возможность повысить точность воспроизведения задания за счет смены режимов в неэффективно работающих модельных контурах регулирования. Результаты моделирования показывают, что при существенно нестационарных неконтролируемых возмущениях, особенно при их резких изменениях, использование предлагаемого регулятора повышает точность воспроизведения задания в среднем на 5% за счет смены режимов работы 0 модельных контуров.
Формула изобретения
Регулируняцее устройство, содержа-, 5 щее первую и вторую модели объекта,
выходами соединенные соответственно с первыми входами первого и второго сумматоров, фильтры низкой частоты, первый вход и выход первого фильтра низкой частоты подключены соответственно к выходу первого блока сравнения и к пе рвому входу первого регулятора, первые входы второго и третьего фильтров низкой частоты соединены соответственно через первый и второй квадраторы, с выходами второго и третьего блоков сравнения, а выходы - с первым и вторым входами третьего сумматора, первый вход четвертого фильтра низкой частоты подключен к выходу четвертого блока сравнения, выход первого регулятора соединен с первым входом пятого блока сравнения, первый вход шестого блока сравнения подключен через второй регулятор к выходу четвертого фильтра низкой частоты, а выходы пятого и шестого блоков сравнения соединены соответственно с первыми входами первой и второй моделей объекта; вторые Р,ХОДЫ первого и второго сумматоров подключены к первому входу устройства,, выход первого сумматора г- к первым входам первого и второго блоков сравнения, а выход второго сумматора - к первым входам третьего и четвертого блоков сравнения, вторые входы первого, второго, третьего и четвертого блоков сравнения соединены с .вторим входом устройства, первый и второй входы третьего сумматора соединены соответственно с первыми входами первого и второго блоков деления, а выход - с вторыми входами первого и второго блоков деления, первый и второй блоки умножения, первые входы которых .соединены соответственно с выходами первого и второго блоков деления вторые входы - с первыми входами
шестого и пятого блоков сравнения, а выходы - с первым и вторым входами четвертого сумматора, выход которого подключен к вторым входам пятого и шестого блоков сравнения, о тличающееся тем, что, с це;1ью повышения точности устройства, оно содержит первре и второе реле, первый и второй ключи, первый и второй масштабирутосцие блоки, блок задания и седьмой и восьмой блоки сравнения, первые входы которых подключены к блоку задания, вторые входы - соответственно к выходам второго и первого блоков делеНИЯ, выход второго фильтра низкой частоты соединен через первьда масштабирующий блок с первым входом первого ключа, выход которого подключен к второму входу третьего фильтра низкой частоты, выход последнего соединен через второй масштабирующий блок с первым входом второго ключа выход которого подключен к второму входу второго фильтра низкой
частоты, выход седьмого блока сравнения соединен через первое реле с вторыми входами первой стадии объекта, первого фильтра низкой частоты, первого регулятора и второго ключа, а
выход восьмого блока уравнения соединен нерез второе реле с вторыми входами второй модели объекта, четвертого фильтра низкой частоты и первого ключа.
Источники информации,
принятые во внимание при экспертизе
кл. G 05 В 13/02.
кл. G 05 В 13/02, (прототип).
