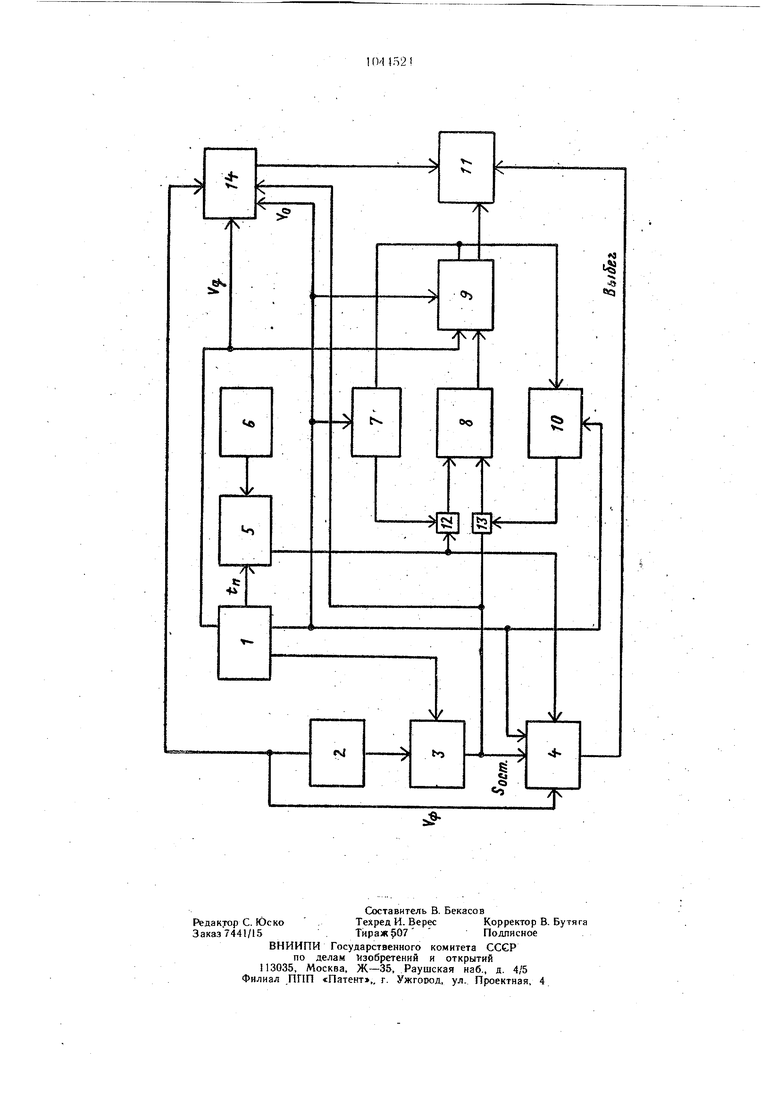
Изобретение относится к устройствам yii | авления движением nocf.-ion, прелма.чначено для автоматизации псленил пое.чла, и может быть испо.пьяопано на магистральных линиях железнодорожного транспорта. Известно устройство для автоматическо го управления движением поезда, содержащее датчик пройденного- пути и скорости; выход которого связан с первым входом блока вычисления точки начала выбега,-первым входом блока управления торможением и с одним входом блока контроля пути, а другой его вход соединен с первым выходом блока программ, выход блока контроля пути соединен с другим входом блока управ-j торможением, перв.ым входом первого сумматора и вторым входом блока вычисления точки начала выбега, входы б;лока контроля времени соединены с таймером и другим выходом блока программ, а его выходы связаны с,одним входом второго сумматора и тре1ьим входом блока вычисления точки начала .выбега, третий и чет вертый выходы блока программ связаны соответственно с двумя входами блока уставки скорости и с двумя входами блока управления торможением, выходы первого и второго сумматоров подсоединены соответственно к одному и другому входам блока вычисления скорости, выход которого связан етретьим входом блока уставки скорости,, а выход блока уставки скорости соединен с первым блока регулирования скорости, второй вход которого связан с выходом.блока вычисления точки начала выбега, а третий вход подключен к выходу блока управления торможением 1. Однако известное устройство характеризуется недостаточной .точностью автоматического регулирования в цепях управлеНИН движением поезда. Ошибки в оценке временных параметров известного устройства могут достигать 25 с. Цель изобретения - повышение точности путем расчета времени и пути выбега в процессе вычисления уставки требуемой скорости движения поезда для контрольных участ крв с учетом профиля пути и действующих ограничений скорости; Поставленная цель достигается тем, что устройство снабжено блоком расчета времени выбега и блоком расчета длины выбе га, причем входы указанных блоков подключены к выходу блока программ, пер. вый выход блока расчета времени выбега соединен с вторым входом блока расчета длины вь{Дега, к которому подключен второй выход блока уставки скорости, выходы блоков расчетавремени выбега и расчета длины выбега соответственно соединены с вторыми входами первого и второго сум маторов. На чертеже представлена блок-схема устройства для автоматического угфавлення движением, поезда. Устройство содержит блок 1 программ, датчик 2 пути и скорости, блок 3 ,контроля пути, блок4 вычисления точки начала выбега, блок 5 контроля времени, таймер б,у блок 7 расчета времени выбега, блок R вычисления скорости, блок 9 уставки скорости,блок 10 расчета длины выбега, локомотнп ный блок 11 регулирования скорости, сумматоры 12 и 13, блок 14 управления торможе(нем.. Устройство работает следующим образом. На выходах блока 1 программ форми|)уются величи.ны программного времени поезда по контрольному участку, про-. 1-раммной длины контрольного участка, допустимой скорости движения и скорости нз следующем участке планового ограничени$ скорости. В блоке 3 контроля пути вычисляется величина разности между пройденным путем, измеренным с помощью датчика 2 пути и скорости, подаваемая с его выхода на один из входов блока 3, и программной величиной контрольного участка, которая подается на другой вход блока 3 с выхода блока 1 программ, . вь1числяется оставшийся до конца контрольного участка путь (Seer), который подается на один из входов блока 4 вычисления точки на.чала , выбега, на другие выходы которого поступают величинь фактической скорости движения, измеренной с помощью датчика 2 пути. скорости, времени, оставшегрся до концй контрольного участка (), вычисляемая в блоке 5 контроля времени путем определе- ПИЯ разности между программным временем, требуемым для прохождения контрольного участка, и реальным временем хода поезда, значение которого поступает из таймера б, и велнчина скорости на участке плановоиг ограничения с выхода блока 1 программ. В блоке 4 вычисления точки начала вь1бега определяется путь и время движений на выбеге, начиная от фактической скорости Уср, измеряемой датчиком 2 пути и скоростн, до скорости ограничения УО , задаваемой из блока 1 программ. Если вычисленное значение длины выбега меньше оставшегося пути SOCT, задаваемого блоком 3 контроля пути, и время движения, на выбеге меньше или равно оставшемуся времени хода if)cl задаваемому блоком 5 контроля времени; то на один из входов локомотивного бло ка 1I регулирования скорости подается Kd манда на отключение тяги. В блоке 14 управления торможением, н входы которого поступают величина фактической скорости движения поезда, измеренная с помощью датчика 2 пути и скор.ости, величины допустимой скорости движения и уровня скорости ограничения в конце контрольного ,астка из блока 1 программ, величина пути оставшегося до конца контрольного участка с выхода блока 3 контроля пути, величина фактической скорости Уф сравривается с величинами допустимой скороеТи лпижеиия iibci.ia Vj и скорости на yiact К(, ограничения в конце ланио1о контрО/шного участка. Кроме того, блок 4 обеспечи-. вает прицельное тсрможение перед участком ограничения. Причем если величина V|p V в любой точке контрольного участка или на участке планового ограничения, то на другой вход локомотивйого рег-улятора 11 скорости поступает сигнал «Торможение. Уставка требуемой скорости движения определяется с учетом длительности выбега tg и в его длины SB. Вычисление длительности выбега tg осуществляется в блоке 7 расчета времени выбега. Для этого исполь4юван метод аппроксимации траектории дви: Жения поезда равнозамедленным движениег ta , } сЩ V Где -уставка скорости, задаваемая и| .. блока 9 фиксации уставки CKopocTHi Vo -уровеиь скорости ограничения в коИ це данного контрольного участка; CXi -ускорение поезда в функции от профиля пути .«. Значения Vo и i задаются из блока про грамм.. Вычисление длины выбега Sg осуществляется в блоке 10 расчёта длииы выбега. Принимая указаиные выще допущеиия, Л--- УУ-УО в 20(1) Зйачеиия V,, иг зaдaюtcя аиалбШчио. Ё сумматорах 12 и 13 производится соответственно вычисление разности ty времени toct, и времени выбега t.: ty tg и раЗиости длины путем оставщегося до конца коитрольиого участк.а SOCT и длииы выбега S. Величины ty и 5у редставляютсобой и путь, который поезд должен пройти со скоростью Vy . В блоке 8 вычисления скорости, исхоля ИЗ величин ty и Sy, определяется-уставка требуемой скорости движения поезда . .. Это значение анализируется в блоке S уставки скорости, Если это значение отличается от ранее выбранного, то с входа блока 9 оно поступает в блок 7 расчета време йи выбега и блок 10 расчета длины выбега. Процесс вычисления yctaBKH требуемой скорости заканчивается тем, чтб два значения уставки. (вновь вычисленное и предыдущее) становятся равныкгн друг другу с точностью до d Vy, (У. Величина уставки W , выбранная из y ловия равенства двух последовательно вычисляемых уставок, является значением, удовлетворяющим наиболее точному выполиению графика движения поезда. Если оно меньше или равно допустимой скорости движения Vf , то уставка подается иа второй вход локомотивного блока 4 регулирования Скорости для исполнения. В том случае, если Vy больще , уставкой требуемой скорости движения Vy является значение допустимой скорости движения поезда vjr. ; Введение блоков расчета длины выбега, расчета времени выбега и фиксации уставки скорости позвлляет по сравнению с прототипом увеличить точность выполнения графикового времени хода, что в свою очередь позволяет улучшить использование пропускйой способности железиодорожиых лииий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| Устройство для управления движением поезда | 1975 |
|
SU561684A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| Способ повышения скорости прокатки на мелкосортном прокатном стане и устройство для его осуществления | 1978 |
|
SU910248A1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| Устройство для упрдвления остановкой поезда в заданной точке | 1976 |
|
SU597163A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2789420C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТ ДВИЖЕНИЕМ ииьзДА, содержащее датчик пройденного пути и скорости, выход которого связан. :й первым входом блока вычисления точки начала выбега, первым входом блока управления торможением и с одним входом блЙкЗ контроля пути, а другой его вход соединен с первым выходом .блока программ, выхоД блока контроли пути соединен с другим входом блока управления торможением, первым входом первого сумматора и вторым входов &1ока вычисления точки начала выбег | входы блока контроля времени соединены Ъ таймером н другим выходом блока программ. а его выходы связаны с одним входом второго сумматора и третьим входом блока вычисления точки начала выбега, третий и ч1етвертый выходы блока программ связаны соответственно с первым и вторым входами -блока уставки скорости и с первым и вторым входами блока управления торможениеМ, выходы первого и второго сумматоров подсоединены соответственно к одному и другому входам блока вычисления скорости, высход которого связан с третьим входом бдока уставки скорости, а выход блока уставки скорости соединен с первым входом блока регулирования скорости, второй вход которого связан с выходом блока вычисления Точки начала выбега, а третий вход подключен к выходу блока управления торможени:i ем, отличающееся тем, что, с. целью повыше ния точности, оно снабжено блоком расче(Л та времени выбега и блоком расчета Длины, .выбега, причем входы указанных блоков под ; ключены к выходу блока программ, первый выход блока расчета времени выбега соеди нен с вторым входом блока расчета длины выбега, к которому подключен второй вы ход блока уставки скорости, выходы блоков расчета времени выбега и расчета длины -выбега соответственно соединены с вторы,ми входами первого и второго сумматоров 4 4: ОТ Ю Hfiik
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ерофеев Е | |||
| В., Мостов И | |||
| С | |||
| Оптймизация программ движения поездов | |||
| Труды : МИИТ, вып | |||
| КОММУТАТОР ДЛЯ ПРЕРЫВАНИЯ ТОКА В ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫХ ПРИЕМНИКАХ ЭЛЕКТРИЧЕСКОГО ТОКА | 1922 |
|
SU550A1 |
| ,--, - ; 1( | |||
