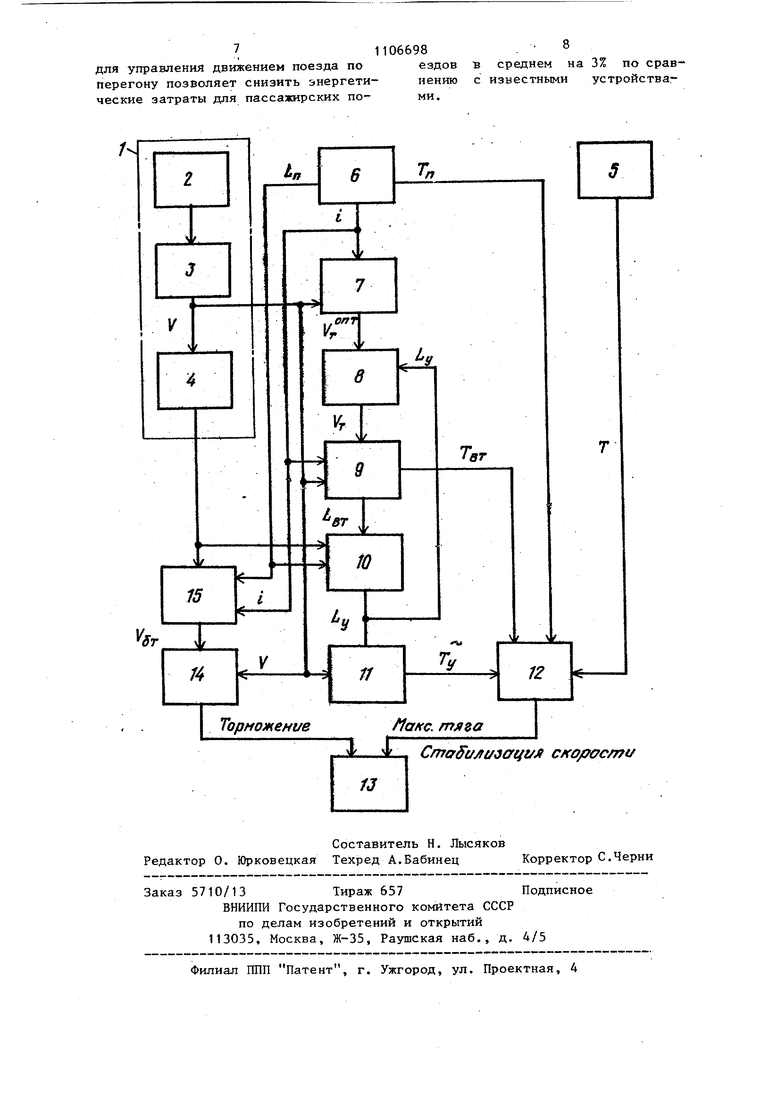
Изобретение относится к транспорту, в частности к устройствам управления скоростью подвижного состава и может быть использовано для ведения поездов на магистральных линиях железнодорожного транспорта. Известно устройство для управления скоростью подвижного состава, содержащее регулятор частоты вращения тяговых двигателей, подключенный входами к выходу блока управления торможением, вход которого соединен с выходом блока расчета безопасной скорости начала торможения, и к входу блока управления тягой, один вход которого соединен с выходом блока расчета времени равномерного движения, другой - с одним из выходов бло ка расчета длины и времени хода по участкам выбега и торможения, третий с выходом таймера, а четвертый с одним из выходов блока задания уклона, длины перегона и времени движе ния, другие выходы которого соединены с одними из входов блока расчета безопаснойскорости начала торможения , блока расчета длины и времени хода по участкам выбега и торможения и блока расчета длины равномерного движения, соединенного другим входом с другим выходом блока расчета длины и времени хода по участкам выбега и торможения, а выходом - с входом блока расчета времени равномерного движения, и датчик пути и скорости, подключенный одним выходом к другим входам блока расчета безопасной скорости начала торможения и блока расчета длины равномерного движения, а другим - к другим входам блока рас чет-а длины и времени хода по участкам выбега и торможения, блока расче та времени равномерного движения и блока управления торможением lj . Недостаток известного устройства заключается в том, что при его применении для заданного графика движения транспортного средства регулирование производится выбором величины требуемой cкopoctи и выбором координаты точки отключения тяги. .При задержке поезда эта координата сдвигается на величину, пропорциональную отклонению по времени от программно заданного графика. В этом случае тра ектория движения поезда уже не будет энергетически оптимальной. Цель изобретения - повышение экономичности путем выбора оптимального режима управления. Поставленная цель достигается тем, что устройство для управления скоростью подвижного состава снабжено блоком вычисления скорости начала торможения и блоком коррекции скорости начала торможения, выход которого подключен к третьему входу блока расчета длины и времени хода по участкам выбега и торможения, один вход к выходу блока расчета длины равномерного движения, а другой - к выходу блока вычисления скорости начала торможения, один из входов которого соединен с одним из выходов датчика пути и скорости, а другой - с одним из выходов блока задания уклона, длины перегона и времени движения. На чертеже представлена блок-схема предложенного устройства. Устройство содержит датчик 1 пути и скорости транспортного средства, состоящий из датчика 2 частоты врашения колесных пар, узла 3 вычисления фактической скорости движения и узла 4 вычисления пройденного пути, таймер 5 и задатчик 6. уклона, длины перегона и времени движения. К входам блока 7 вычисления скорости начала торможения подключены один из входов датчика 1 и задатчика 6, а его выход соединен с входом блока 8 коррекции скорости начала торможения, выход которого соединен с одним из входов блока 9 расчета длины и времени хода по участкам выбега и торможейия, к другим входам которого подключены один из выходов датчика 1 и задатчика 6. Один из выходов блока 9 соединен с одним из входов блока 10 расчета длины равномерного движения, к другим входам которого подключены один из входов датчика 1 и задатчика 6. К выходу блока 10 подключен другой вход блока 8 и один из входов блока 11 расчета времени равномерного движения, другой вход которого подключен к одному из выходов датчика 1. Выход блока 11 соединен с одним из входов блока 12 управления тягой, другие входы которого соединены с выходами таймера 5, задатчика 6 и другим выходом блока 9. Выход блока 12 подключен к одному иэ входов регулятора 13 частоты вращения тяговых двигателей, к другому
входу которого подключен выход блока 14 управления торможением. Входы блока 14 подключены к датчику 1 и. выходу блока 15 расчета безопасной скорости начала торможения. Входы блока 15 соединены с выходами датчика 1 и задатчика 6.
Исходя из соображений минимизации расхода электроэнергии, предполагается что движение по перегону организовано в следующих режимах: разгон, поддержание постоянной скорости, выбег, торможение.
Для электроподйшкного состава без рекуперативного торможения расход электроэнергии на тягу
у. (т,
-ЛчуДу л аз СГ) T-UJ
im vVVioUl а... 20
е Р и Q - массы локомотива
и состава;
2
КПД тяговой установки;
коэффициент, учитыва-. ющий инерцию вращающихся масс;
фактическая и требуемая
V и
г скорости движения поезда; максимально допустимое
п значение удельной силы тяги;
удельное основное сопроWeтивление движению поезда;
i уклон пути; и S.
координаты точки начала стабилизации скорости и точки начала выбега.
Время хода по перегону и его длина фиксированы. Выражение для времени хода.по перегону имеет вид Ь - максимальное значение удел ной тормозной силы; VT - скорость начала движения; w - удельноесопротивление дви жению поезда на выбеге. Длина перегона также выражается суммой n j-pBJ SN,vVi H CvVWx v)M
, a величина Sj однозначно зависит от значения скорости v
Vu.
г- {
4;J twtNU Wo v (
Дпя получения энергетически оптимальной траектории движения поезда следует Определить условия минимума функции A(VU, v, Sg) при
Sg) const , VT, Sg) const. Из этих условий получено выражение для энергетически оптимальной скорости начала торможения
Vy
,опГ
от удельного основного сопротивления
I , -. dwoCv) движению w(v) -7- о dv
Устройство работает следующим образом.
В узлах 3 и 4 датчика 1 производятся вычисления фактической скорости и пройденного пути v и S на основании сигнала с выхода датчика 1. На выходах задатчика 6 формируются величины программной длины контрольного участка L, программного времени хода поезда по перегону с учетов отклонения СТ графика Т и уклона пути i в конце перегона. В блоке 15 расчета безопасной скорости начала торможения ее величина рассчитывается на основании информации о пройденном пути S, программном значении длины перёгона L,
уклоне i, поступающих от и задатчика 6 датчика V6,- llaUVCU-9), где VST безопасная скорость начала торможения; a(i) - ускорение поезда в функции от профиля пути i. В блоке 14 управления торможением значение vj найденное в блоке 15, сравнивается с фактической скоростью движения поезда v, которая; подается на второй вход блока 14. При превышении безопасного уровня скорости начала торможения с выхода блока 14 в регулятор 13 поступает сигнал на включение торможения. В блоке 7 вычисления скорости начала торможения, на вход которого поданы величины фактической скорости движения поезда v и профиль пути i с выходов датчика 1 и задатчика 6, определяется значение скорости v по формуле (5). Величина энергетически оптимально скорости начала торможения поступает в блок 8 коррекции скорости начала торможения, на другой вход которого подана длина участка равномерного движения L и с выхода блока 10 расчета длины равномерногЬ движечия. Если в результате вычисления в блоке 10 оказывается, что Lij О, это означает, что участка равномерного движения уже нет на оптимальной траектори и она может содержать лигаь участки в При этом скорость бега и торможения. опт начала торможения Vf. vf . Уровень скорости начала торможения увеличивается на S , в этом случае , где V|-o - нескорректированное значение Vf; 8 - приращение. Скорость Vf в результате вычислений, выполняемых в блоках 8-10, возрастает до тех пор пока LIJ на выход блока 10 расчета длины равномерного движения не станет равным нулю. Скорректированное в зависимости от LM значение Vy подается на вход бло ка 9 расчета длины и времени хода по участкам выбега и торможения. В последнем на основании фактической ско рости Vfi и профиля определяются LQ и Тд. Для приближенного вычисления этих величин может быть использована гипотеза о равноускоренном движении I 4eT SdeCi 20) 0|(;) Значение подается на один иа входов блока 10 расчета равномерного движения, на другие входы ко торого поданы программная длина пере гона L с вЬосода задатчика 6 и текущее значение пройденного пути S с вы хода датчика 1. В блоке 10 вычисляется длина участка равномерного движения LM LD - S - Lg , которая при - ВТ L, 5- о поступает на вход блока 1 1 расчета времени равномерного движения. В блоке 11, на другой вход которого подается величина фактической скорости движения поезда v, вычисляется время равномерного движения которое поступает на вход блока 12 управления тягой. На другие входы этого блока поданы величина времени хода по участкам выбега и торможения Тц, программное время хода по перегону Т,,, а также фактические время Т выхода таймера 5. Управление тягой осуществляется на основании расчета величины S Т (Т,- Т) - (Тд, Ту). Величина S Т является разностью между фактически оставшимся временем хода до конца перегона Т, - Т и расчетным временем хода по оптимальной траектории, включающей участки движения с постоянной скоростью Vij , выбега и торможения. В .начале перегона при ST О, когда Т - Т Tg T|j, в регулятор 13 посыпается сигнал включения максимальной тяги и поезд разгоняется до тех пор пока Т - Т не станет равным Tg + Ч наступит фаза поддержания постоянной скорости Vy . В конце перегона, когда LD - S мало, оптимальная траектория уже не содержит участка движения с постоянной скоростью, т.е. Ly 0. При этом блок 8 коррекции скорости начала торможения увеличивает расчетное значение v,. до тех пор, пока Ly не станет равным нулю. После этого и блоке 9 расчета длины и времени хода по участкам выбега и торможения по оставшемуся до конца перегона пути L - S вычисляется время хода на Выбеге и торможении Tg. Когда это время станет меньше оставшегося „ Т, то из блока 12 управления тягой в pe yлятop 13 посылается сигнал отключения тяги. Таким образом, формируемая предложенным устройстве последовательность режимов управлений поездом явлkeтcя энергетически оптимальной при любых отклонениях от графика. Тяговьк расчеты покаэьгоают, что применение предложенного устройства
71106698 .
для управления движением поезда по ездовв среднем на 3% по сравперегону позволяет снизить знергети- нениюс изыестными устройстваческие затраты для пассажирских по- ми.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением поезда | 1981 |
|
SU1044524A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2399515C1 |
| Устройство для управления скоростью движения поезда | 1985 |
|
SU1284872A1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| Способ управления движением поезда | 1979 |
|
SU821273A1 |
| Устройство для управления движением поезда | 1975 |
|
SU561684A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДВИЖНОГО СОСТАВА, содержащее регулятор частоты вращения тяговых двигателей, подключенный входами к выходу блока управления торможением, вход которого соединен с выходом блока расчета безопасной скорости начала торможения,и к входу блока управления тягой, один вход которого соединен с выходом блока расчета времени равномерного движения, другой - с одним из выходов блока расчета длины и времени хода по участкам выбега и торможения, третий с выходом таймера, а четвертый с одним из выходов блока задания уклона, длины перегона и времени движения, другие выходы которого соединены с одними из входов блока расчета безопасной скорости начала торможения , блока расчета длины и времени хода по участкам выбега и торможения и блока расчета длины равномерного движения, соединенного другим входом с другим выходом блока расчета длины и времени хода по участкам выбега и торможения, а выходом с входом блока расчета времени равномерного движения, и датчик пути и скорости, подключенный одним вы- . ходом к другим входам блока расчета безопасной скорости начала торможения и блока расчета длины равномерного движения, а другим - к другим входам блока расчета длины и времени хода по участкам выбега и торможения, блока расчета времени равно(Л мерного движения и блока управления торможением, отличающееся тем, что, с целью повышения экономичности путем выбора оптимального режима управления, оно снабжено блоком вычисления скорости начала торможения и блоком коррекции скорости начала торможения, выход которого подключен к третьему входу блока расчета длины и времени хода по участкам выбега и торможения, один вход - к вы05 05 ходу блока расчета длины равномерного движения, а другой - к выходу со блока вычисления скорости начала тор00 можения, один из входов которого соединен с одним из выходов датчика пути и скорости, а другой - с одним из выходов блока задания уклона, длины перегона и времени движения.
t-n
УФ
J4
Тормозкение/1акс.тл9а
jk-aL CmaS t/ i/JfftfUJi Cfcojoocmt/
/у
fer
п
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ерофеев Е.В., Головичер Я.М | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| КОММУТАТОР ДЛЯ ПРЕРЫВАНИЯ ТОКА В ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫХ ПРИЕМНИКАХ ЭЛЕКТРИЧЕСКОГО ТОКА | 1922 |
|
SU550A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
