Предметом изобретения является способ уравновешивания жестких и гибких роторов в собственных опорах при рабочем чнсле оборотов.
Отличительной особенностью описываемого способа является то, что, с целью устранения неуравновешенности балансируемого ротора, применены два пробных груза, с помош,ью которых выявляется влияние каждого пробного груза на каждую опору, а с помощью двух пробных и др.ух допо:1нительных грузов устраняется в плос1чостях нсправ.тенпя их взаимное влиянгю на соседние опоры.
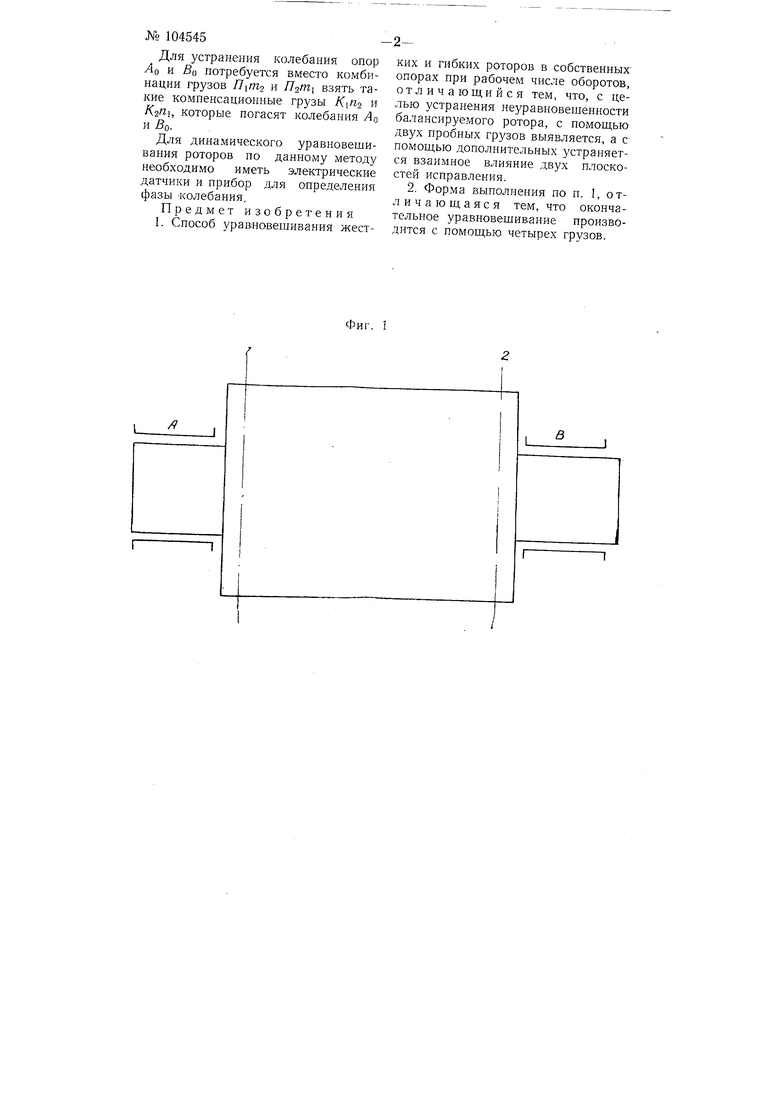
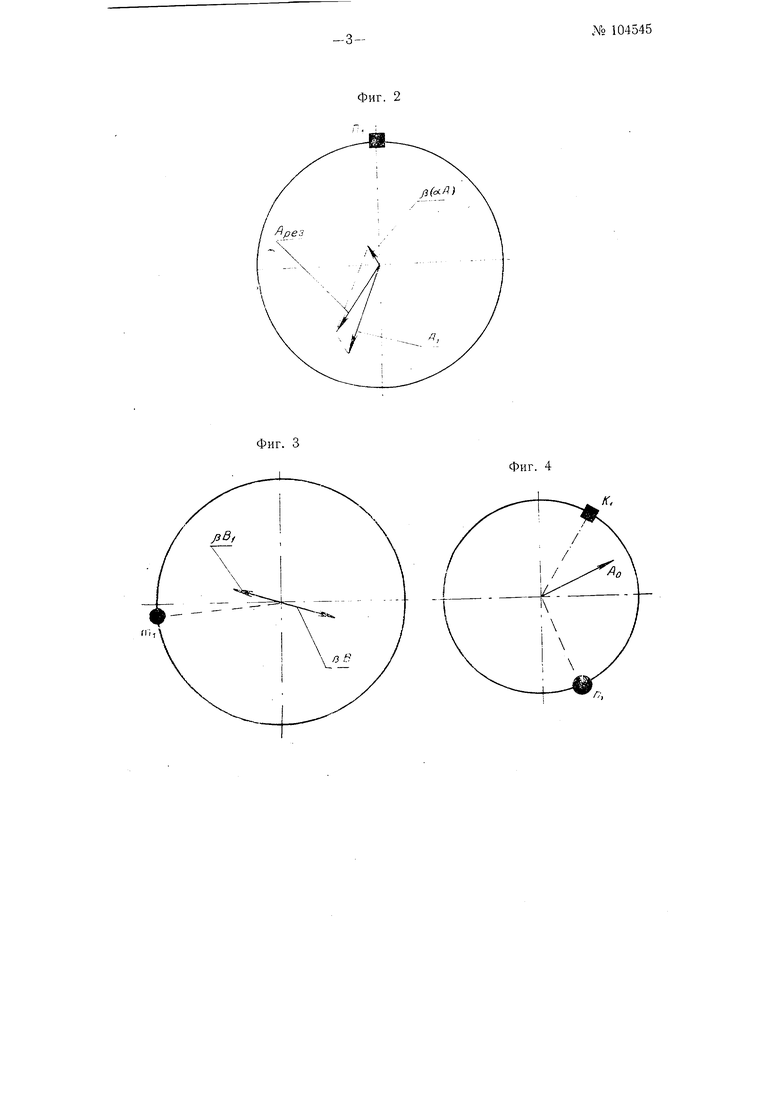
На фиг. 1 показан ротор на двух опорах и дне плоскости исправления; на фиг. 2, 3 и 4 - векторы колебаиий опоры /1; па фиг. 5, 6 и 7--векторы колебаний опоры В.
РОтор. покояшийся на г.вух опорах Л и В, имеет плоскости исправления / и 2.
При установке одног-о пробного груза Я в плоскости / будут наблюдаться колебания опор Л и В, характеризуемые векторами Ль для опоры Ли y-Ai для опоры В.
При установке одного пробного груза П2 в компеисациоппой плоскости 2 колебания опор будут характеризоваться векторами В и ЗВ).
Для устранения влияния пробных грузов на соседнюю опору, кроме груза Я, необходимо установить допо.тиительный груз /п в плоскости 2 так, чтобы колебание опоры В вместо аЛ1 было равно 1улю, и, кроме груза Яо. устагюпить дополнпTe.Tbiibiii f ii Il/iocKocTu / так, чтобы колебание ;-иОры Л :5место /-Й1 бы.то равно нулю. Тем самым груз Я1 и допол июлыи п rpy:i ;. в плоскости 2 будут 15.1;.ять только иа опору л. а груз /7:; и допплиитсльНЫЙ ГОУЗ Н| в 1Ьи;СКОСТИ / будуТ
влиять только иа оиору В.
при постапо; : о uv.x спаренных грузов ко.чебанио :ч;()11Ы /1 будет: AI + 31аЛ ) Л;;,.,, и колебание опоры В будет: В-, -f- -4f-S) Б.,,,,. чолшенснруюшне всктопы Л и В равны по вс.шчгле ве1чТораА; 2:Л, JBi, по иапраБ/спы в П11отивоположные стопоны. № 104545Для устранения колебания опор АО и BO потребуется вместо комбинации грузов и 2OTi взять такие компенсационные грузы /Cin2 и /С2«1, которые погасят колебания и Во. Для динамического уравновешивания роторов по данному методу необходимо иметь электрические датчики и прибор для определения фазы Колебания. Предмет изобретения I. Способ уравновешивания жест ких и гибких роторов в собственных опорах при рабочем числе оборотов, отличающийся тем, что, с целью устранения неуравновешенности балансируемого ротора, с помощью двух пробных грузов выявляется, а с помощью дополнительных устраняется взаимное влияние двух плоскостей исправления. 2. Форма выполнения но п. 1, отличающаяся тем, что окончательное уравновешивание производится с помощью четырех грузов.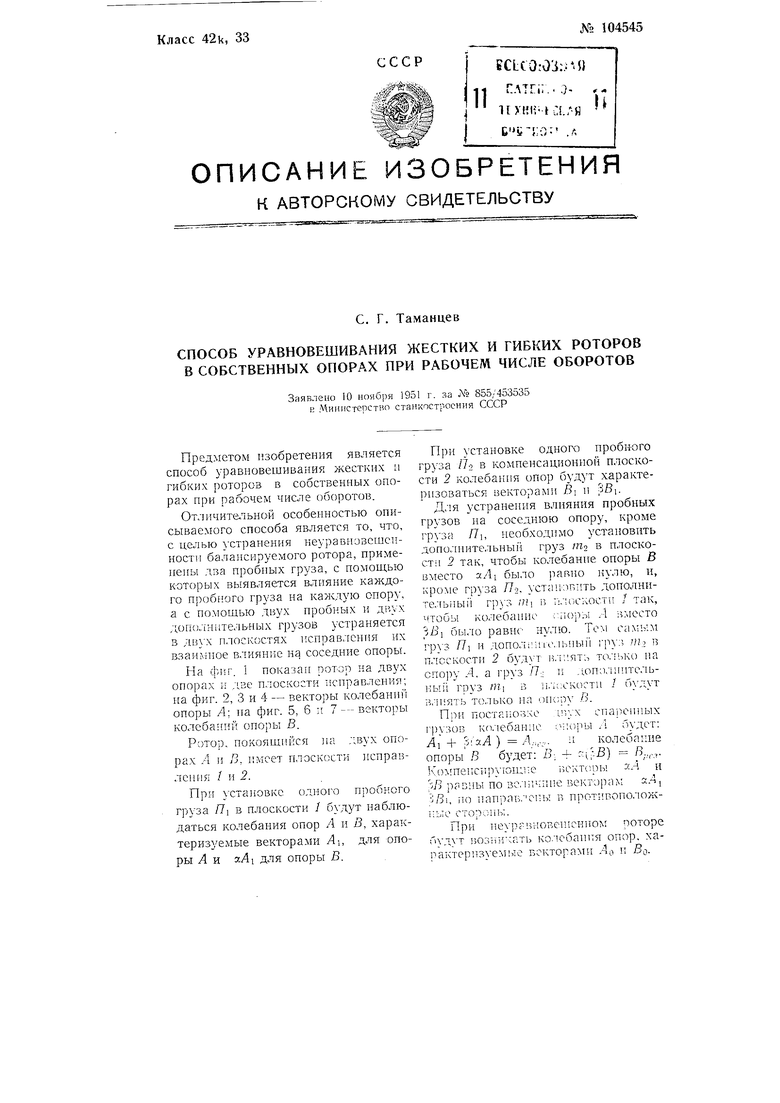
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки деталей в собственных подшипниках | 1952 |
|
SU99385A1 |
| Трехфазный синхронный генератор | 1946 |
|
SU69380A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| Способ балансировки двух роторов в сборе | 1976 |
|
SU611125A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |

/
Фиг. I
Фиг. 4
К Фиг. 6
Фиг. 5
т. Фиг. 7
