Предлагаемое устройство относится к группе балансировочных устройств для определения величины и места расположения уравновешиваюндих грузов в двух плоскостях исправления при динамической балансировке деталей в собственных подшипниках.
Задача динамической балансировки сводится, как известно, к решению системы векторных уравнений, для чего необходимо провести весьма громоздкий графоаналитический расчет.
Применение в предлагаемом устройстве электрического эталонирования (фиктивного уравновешивания) позволяет получить при установке пробных грузов, последовательно в обоих плоскостях исправления, неносредственно нутем измерения, вектора колебаний,равные векторам при установке пробных грузов на полностью сбалансированном изделии, благодаря чему для завершения расчета уравновен1иваюш,нх грузов необходимо произвести лишь арифметичеекие операции и построение одного треугольника.
Построение облегчается применением счетного прибора.
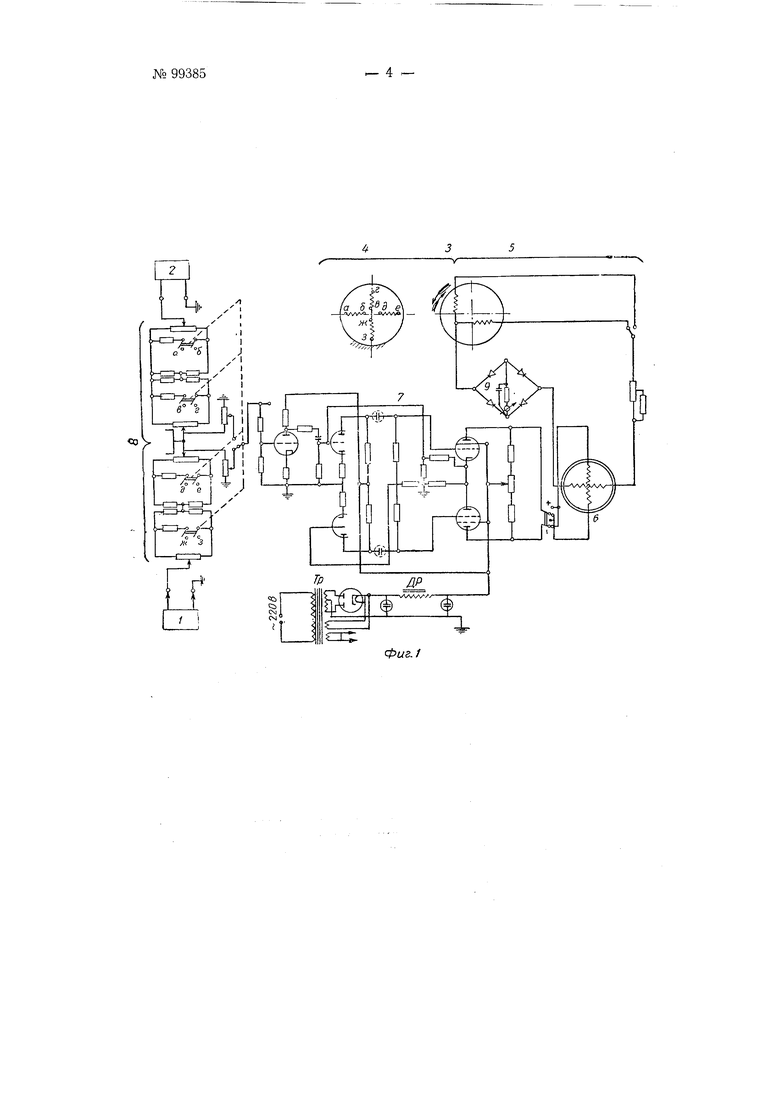
Устройство (фиг. 1) состоит из двух индукционных датчнков 1 и 2, регистрирующих колебания опор, генератора 3 переменного тока, имеющего неподвижный статор 4 е четырьмя обмотками, сдвинутыми но фазе один относительно другого на 90, поворотный статор 5 с двумя обмотками, сдвинутыми одна относительно другой на 90°, и ротор с постоянными магнитами (на чертеже не указан), ваттметра 6, усилителя 7, эталонирующего устройства (узел фиктивного уравновешивания) 8 и индикатора 9 тока.
Напряжение от датчика, 1 или 2 усиливается усилителем 7 и подается на неподвижную обмотку ваттметра ,6.
Хо 99385
На неподвижную обмо.тку ваттметра 6 подается ток от поворотного статора 5 генератора 3, ротор которого вращается синхронно и синфазно с балансируемым изделием.
Показания ваттметра 6 нропорциональны напряжению от датчика к косинусу сдвига фаз между током генератора и нанряжением от датчика, так как частоты их равны.
Фаза колебаний онределяется углом, на который небходимо повернуть поворотный статор 5 генератора 3, чтобы добиться пулевого показания ваттметра 6 ()- Для отсчета на генераторе имеется лимб Со шкалой. При переключении подвижной обмотки ваттметров на вторую обмотку статора 5, сдвинутую относительно первой на 90, и сохранении при этом тока, протекающего через нее, постоянным, при помощи индикатора 9 тока получают величину неуравновещенности (cosf l).
Вектор колебаний может быть определен без поворота статора, что дает возможность производить дистанционный отсчет (не прибегая к вращению поворотного статора). При нулевом положении поворотного статора 5 показания ваттметра нри подключении к нему первой обмотки статора 5 пропорциональны вертикальной проекции вектора колебаний. При переключении первой обмотки ста.тора 5 на перпендикулярную ей показания ваттметра нропорциональны горизонтальной проекции вектора колебаний.
Имея проекции вектора по счетному прибору, можно найти его угол и величину.
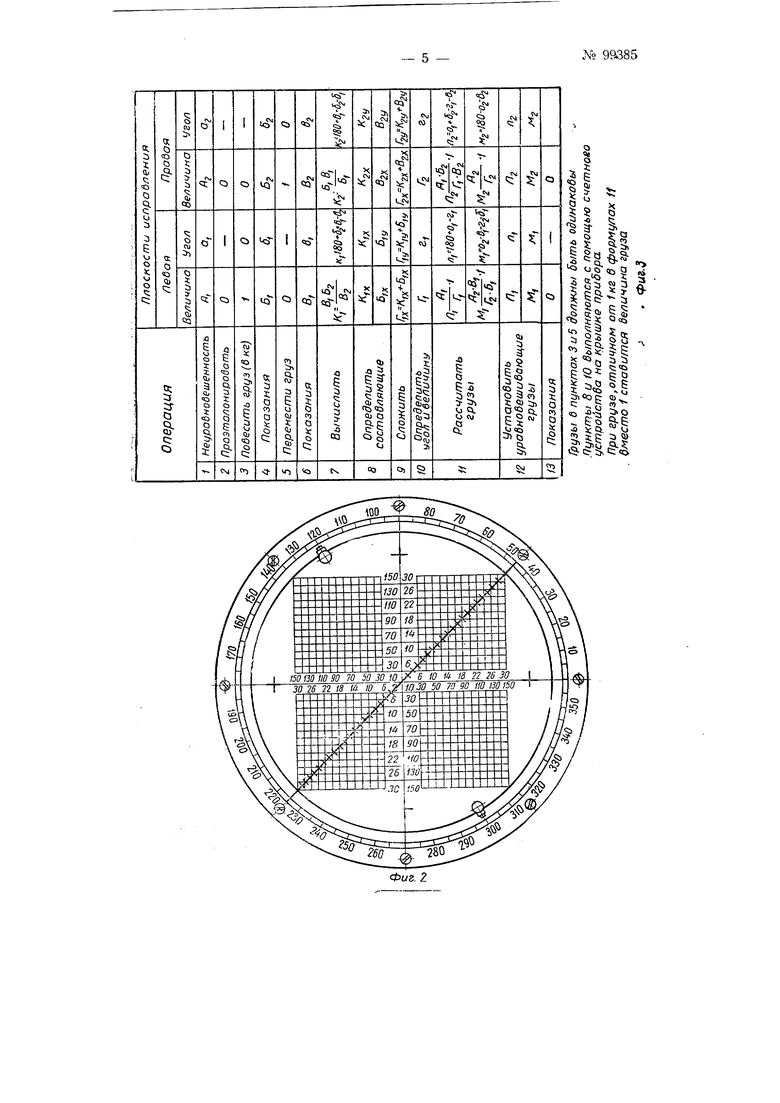
Счетный прибор (фиг. 2) имеет прямоугольную сетку с делениями, соответствующими делениям ваттметра. Сетку цокрывает прозрачный диск с линией и делениями такого же масштаба, как и сетка.
По окружности нанесены деления в градусах. Отметив точки по осям Ох и О.., соответствующие проекциям вектора колебаний в делениях ваттметра, и проведя через них прямые, параллельные координатным осям, находят точку их пересечения. Вращая прозрачный диск, наводят линию на диске на найденную точку.
По шкале этой линии определяют величину вектора колебаний, а на пересечении конца линии с окружностью фазу вектора. Электрическое эталонирование (фиктивное уравновешивание) производится путем подачи на вход усилителя 7 напряжения от двух электрических мостов и одного из датчиков 1 или 2.
Электрические мосты питаются от двух обмоток неподвижного статора 4, сдвинутых на 90° одна относительно другойДля каждого из двух датчиков имеется самостоятельное эталонирующее устройство (узел фиктивного уравновешивания) 8. Для питания устройства неподвижный статор 4 имеет четыре обмотки, сдвинутые одна относительно другой на 90°.
Амплитуда и фаза напряжения, подаваемого от эталонирующего устройства 8, определяются разбалансом мостов- Благодаря питанию эталонирующего устройства 8 от двух обмоток, сдвинутых по фазе на 90°, и применению мостовой схемы, фаза напряжения о.т эталонирующего устройства 8 меняется в пределах от О до 360°.
Когда напряжение, подаваемое от эталонирующего устройства 8, равно по амплитуде и противоположно по фазе напряжению от датчика 1 и 2 и суммарное напряжение, подаваемое на вход усилителя 7, равно нулю, изделие считается фиктивно уравновещенным.
Уравновешивание изделий производится по методике, указанной на фиг. 3. Согласно методике производят первый пуск не сбалансированного изделия и замеряют величину А, А. колебаний правой и левой опор и их фазы ai и а2. Затем электрически, с помощью эталонирующего устройства 8, фиктивно балансируют изделие, добиваясь нулевых показаний ваттметраДалее устанавливается пробный груз в первую плоскость исправления и производится замер вызванных им колебаний правой и левой опор (Б, Б2, 6i, 62).
После этого тот же пробный груз переносится на вторую нлоскость исправления и производится замер вызванных им колебаний обеих опор (BI, 82, BI, 62).
Затем по формулам, указанным на фиг. 3, вычисляются вспомогательные вектора Klx , Kiy и К2.: , К2у .
По счетному прибору (фиг. 2) производится определение вертикальной и горизонтальной проекций векторов Ki, Ка, BI, 62 затем, после проведения действий, указанных в строке 9 рис. 3, определяются по счетному устройству вектора Fi, FI и Го, Г2. Затем определяются величины и положения уравновешивающих грузов.
После установки уравновещивающих грузов изделие уравновещено и при выключенном эталонирующем устройстве прибор дает нулевые показания.
Предмет изобретения
1.Устройство для балансировки деталей в собственных подшипниках, снабженное датчиками, например, индукционного типа, регистрирующими колебания спор балансируемых деталей, отличающееся тем, что, с целью сокращения времени балансировки и упрощения методики определения величины и положения уравновещивающих грузов, оно выполнено в виде генератора переменного тока, имеющ,его ротор, вращающийся синхронно с балансируемым изделием и неподвижный и поворотный статоры, каждый с несколькими сдвинутыми одна
относительно другой обмотками., из которых одна из обмоток поворотного статора включена на подвижную обмотку ваттметра, а напряжение от обмоток неподвижного статора может быть подано в противофазе с напряжением от одного или другого датчика на неподвижную обмотку ваттметра для того, чтобы при установке пробных грузов на балансируемом изделии в каждой из плоскостей исправления, показания ваттметра и угол поворота новоротного статора при измерении вектора вызванных им колебаний были такие же, как и при установке пробных грузов на полностью сбалансированном изделии.
2.В устройстве по п. 1 применение индикатора тока, включенного последовательно с подвижной обмоткой ваттметра и служащего для контроля величины идущего на обмотку ваттметра с обмотки поворотного статора тока.
3.В устройстве по п. 1 применение усилителя для предварительного усилепия напряжения от датчиков перед подачей напряжения на неподвижную обмотку ваттметра.
4.При осуществлении балансировки устройством по пп. 1-3 применение расчетного прибора, состоящего из планщета с координатной сеткой и кругом с градусными делениями и подвижного прозрачного диска с линией и делениями на ней такого же масппаба, как и координатная сетка.
№ 99385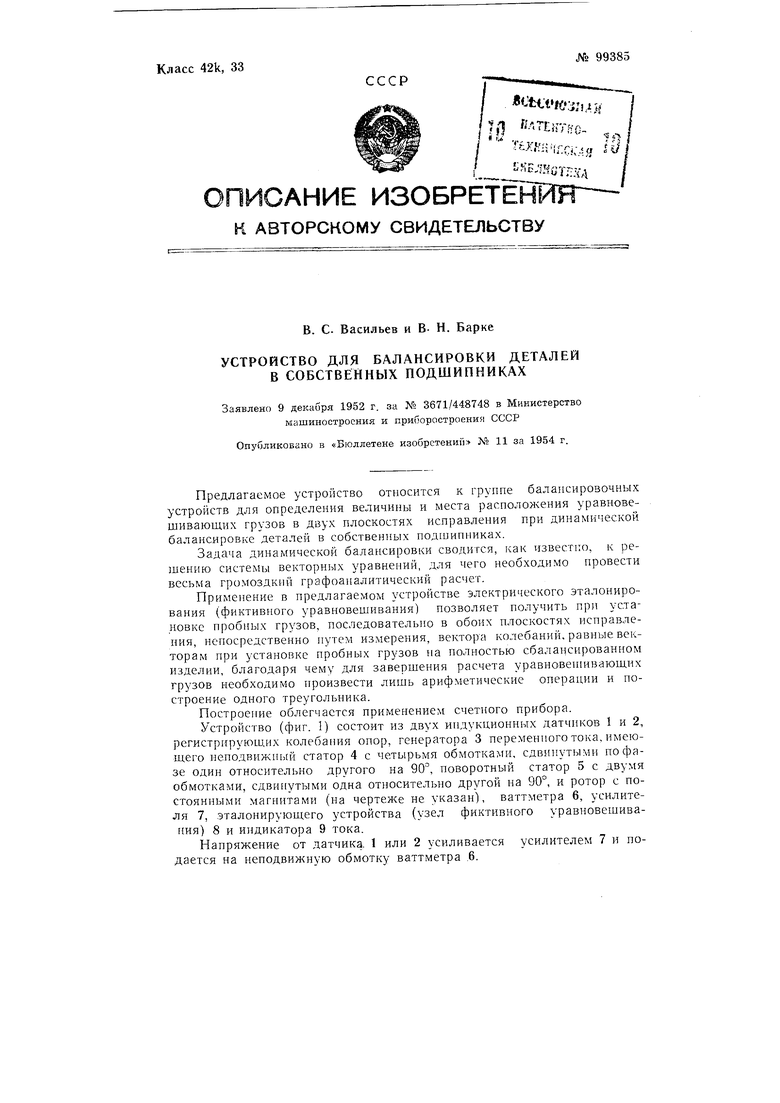
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU382946A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ измерения дисбаланса ротора и устройство для его осуществления | 1976 |
|
SU605139A1 |
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ | 1964 |
|
SU215576A1 |
| Устройство для динамической балансировки вращающихся деталей | 1937 |
|
SU54743A1 |
| Способ настройки станка для балансировки коленчатых валов | 1983 |
|
SU1163169A1 |
| Способ уравновешивания жестких и гибких роторов в собственных опорах при рабочем числе оборотов | 1951 |
|
SU104545A1 |
| Способ балансировки двух роторов в сборе | 1976 |
|
SU611125A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |