1
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматического поддержания заданной глубины хода рабочих органов сельскохозяйственных машин.
Известно устройство управления механизмом навески трактора, содержащее гидрораспределитель с перепус ньгм клапаном и гидродилиндром 1 jl.
Однако это устройство имеет низкую точность поддержания заданной глубины обработки каждым рабочим органом.
Наиболее близким к предлагаемому по технической сущности является устройство для автоматического поддержания заданной глубины хода рабочих .органов сельскохозяйственной машинь, содержащее датчик, связанный с регулятором положения рабочих органов, гидропилиндр перемещения рабочих органов и механизм обратной с в я 31 j 2J .
Данное устройство также не обеспечивает высокую точность поддержания заданной глубины обработки каждь м рабочим органом ввиду того, что путевая длина рабочих органов доходит до 10-20 м и рельеф поверхности почвы не соответствует данным датчика от первого органа до последнего .
Целью изобретения является повышение точности поддержания заданной глубины обработки каждым рабочим органом сельскохозяйственной машины .
Поставленная цель достигается тем что датчик снабжен преобразователем который посредством элемента сравнения соединен с усилителем, связанным посредством соленоидного клйпана с гидроииликдром перемещения, при этом каждый рабочий орган снабжен запоминающим устройством, которое соединено с преобразователем посредством коммутирующих элементов.
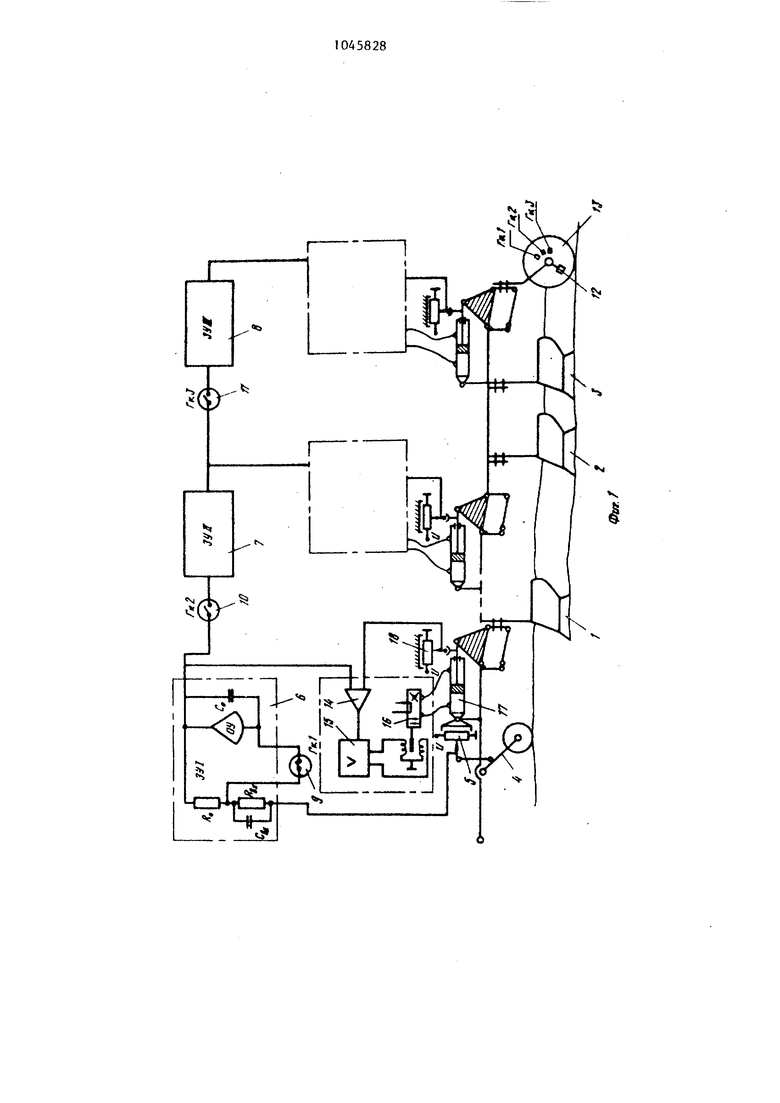
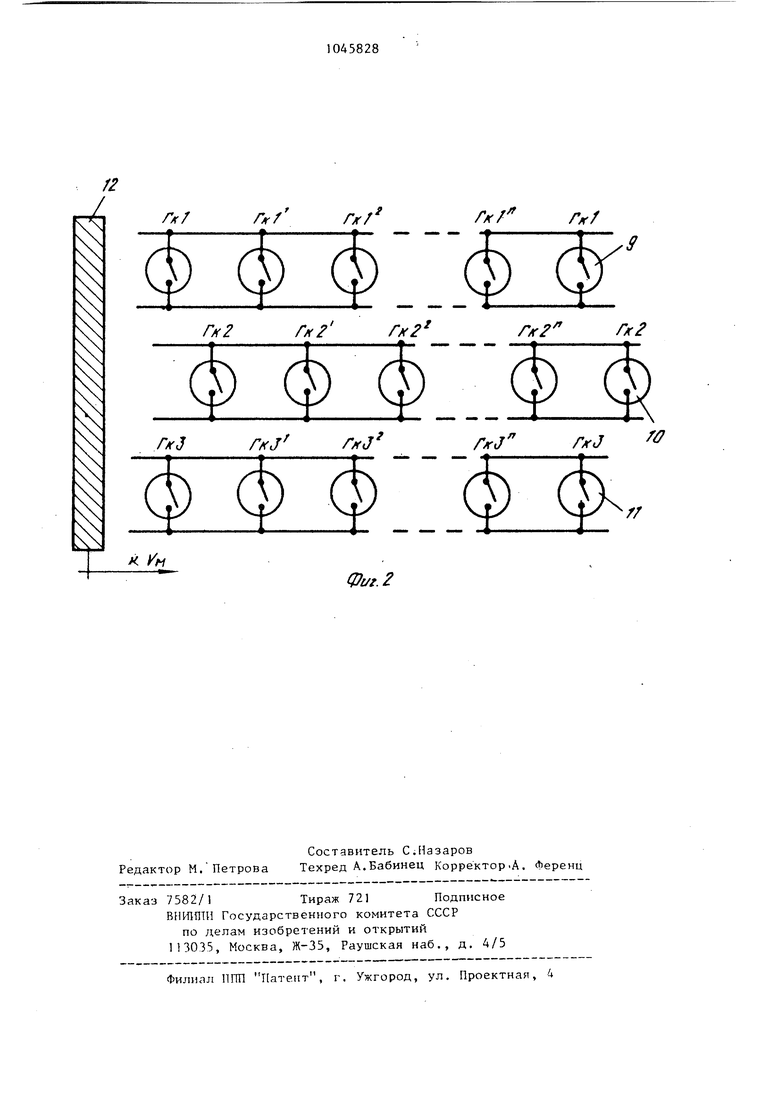
На фиг. 1 изображена принципиальная схема предлагаемого устройства; на фиг. 2 - расположение контактов коммутирующих устройств на герконах на развертке поверхности.
Устройство для автоматического поддержания заданной глубины хода рабочих органов 1, 2 и 3 сельскохозяйственной машины состоит из датчика 4 с преобразователем 5 переме458282
шений в напряжение, запоминанядих устройств 6, 7 и 8 на операционных усилителях ОУ с входными резисторами Рр( , конденсаторами и резис5 торами 1 и конденсаторами Cjj обратной связи. Для последовательной ком- щтагщи запоминающих устройств предусмотрены коммутирующие элементы 9, 10 и 11, выполненные на герконах
Гк2,. . , Гк2;;, .,;
10 Гк1,
ГкЗ,.., ГкЗ, установленные жестко на раме машины, и ко 1мутируемые постоянным магнитом 12 при вращении колеса S3 машины. Каждая цепочка регу5 лирования глубины хода рабочих органов , 2 и 3 машины состоит из 3.riciMCHTa 14 сравнения, усилителя 15 соленоидного клапана Л6, гидроцилиндра 17 перемещения рабочих органов 0 и датчика 18 обратной связи. Каждый гидропилиндр 17 может управлять одним рабочим органом или группой, преимущественно двумя спаренными.
Управляющая часть устройства может быть построена на элементах цифровой логики, пневматической или гидравлической автоматики.
Устройство работает следующим образом.
При движении мапшны датчик 4 копирует рельеф поверхности, а на выходе преобразователя 5 перемещений в напряжение появ.пяются сигналы, соответствующие ;-олебаниям рельефа поверхности., При повороте колеса 13 в момент t, когда магнит 12, перемеща ясь. замкнет контакты Гкj коммутирующего элемента 9, передаточная функция запоминающего устройства 6 на операционном усилителе ОУ определяется по выражению
147 ;
. « - i-vT p
где Tj -- Ср,,, ;
.
cL РО /РВХ
р d|d
При условиях Pg Ср, РрСди
напряжение на вькоде запоминающего
устройства 6 Уд U|, т,е. устанавлинается до уровйя U , имеющехося на вьп-соде датчика 4 с преобразователем 5. В момент размыкания контактов Гк1 и коммутирующего элемента 9 на .выходе запоминающего устройства 6 фи.ксируется напряжение , Это значение напряжения в элементе сравнения 14 сравнивается с ее значени ем, полученным от датчика 18 обрат ной связи, а результат через усили тель J 5 открывает соленоидный клапан 16 гидроцилиндра 17 перемещения рабочего органа. Осуществляетс соответствующее изменению рельефа поверхности почвы перемещение рабо чего органа 1. При движении машины в следующий момент дальнейшим поворотом колеса 13 магнит 12 замыкает,а затем размыкает контакты Гк2 коммутирующего элемента 10, и значение напряжения появляется на выходе запоминающего устройства 7 и сохраняется. При это к моменту подхода рабочего органа 2 к точке рельефа поверхности, вызвавшего перемещение рабочего органа 1, цепочка регулирования запоминающего устройства 7 перемещает рабочи орган 2 сообразно значению U напряжения. Далее значение U -напряже ния запоминается запоминающим устройством 8 и вводится в соот етствукщую цепочку регулирования для ус тановки по ее значению перемещаемого этой цепочкой рабочего органа 3. 8 . 4 При этом герконы коммутирующих устройств 9, 10 и П расположены таким образом, что при движении маг нита 12 со скоростью /ц пропорци- ональной скорости Уц машины, одновременно с замыканием одних контактов коммутирующего элемента 9 замыкаются и контакты с соответствующим индексом коммутирующего элемента П, а затем - коммутирующего элемента ID, В результате в установившемся режиме работы через запоминающие устройства 6, 7 и 8 непрерывно и последовательно перемещаются со сдвигом по фазе значения напряжений датчика 4 с преобразователем 5, соответствующие изменению рельефа поверхности почвы. При этом следящие цепочки регулирования, стоящие за соответствующими запоминающими устройствами 6, 7 и 8, осуществляют последовательное во времени и пройденном пути перемещение рабочих органов машины сообразно изменению рельефа. Это позволяет вьщержать заданную глубину обработки каждым рабочим органом ма шины, агрегатируемой энергонасыщенными тракторами, когда почвообрабатьшающая машина типа плуг имеет большую длину.
/V/
/V/
/v/
/V/
/у/
fffJ
AfJ
/VJ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Почвообрабатывающее орудие | 1979 |
|
SU882432A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В СКВАЖИНЕ И ГРАНИЦЫ РАЗДЕЛА ДВУХ ЖИДКОСТЕЙ С РАЗЛИЧНОЙ ПЛОТНОСТЬЮ | 2002 |
|
RU2232268C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2309567C2 |
| Способ регулирования микроклимата в теплице и система для его осуществления | 1991 |
|
SU1819537A1 |
| Автоматический клапан для систем пожаротушения | 1989 |
|
SU1743615A2 |
| Устройство для автоматическогопОддЕРжАНия зАдАННОй глубиНыХОдА РАбОчиХ ОРгАНОВ СЕльСКО-зяйСТВЕННОй МАшиНы | 1979 |
|
SU808022A1 |
| Широкозахватное почвообрабатывающее орудие | 1990 |
|
SU1789089A2 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ РАБОЧЕГО ОРГАНА ПРИ ВЫКОПКЕ РАСТЕНИЙ | 2018 |
|
RU2685143C1 |
| Система автоматической корректировки положения рабочих органов машины для междурядной обработки растений | 1984 |
|
SU1186096A1 |
| Устройство для автоматического регулирования высоты расположения рабочих органов сельскохозяйственных машин | 1983 |
|
SU1093274A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ЗАДАННОЙ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ сельскохозяйственной машины, содержащее датчик, связанный с регулятором положения рабочих органов, гидроцилиндр перемещения рабочих органов и механизм обратной связи, отличающееся тем, что, с целью повышения точности поддержания заданной глубины обработки, датчик снабжен преобразователем, который посредством элемента сравнения соединен с усилителем, связанным посредством соленоидного клапана с гидроцшшндром перемещения, при этом каждый рабочий орган снабжен запоминающим устройством, которое соединено с преобразос вателем посредством коммутирующих элементов. с/) С
3///./
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления механизмом навески трактора | 1973 |
|
SU648039A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматическогопОддЕРжАНия зАдАННОй глубиНыХОдА РАбОчиХ ОРгАНОВ СЕльСКО-зяйСТВЕННОй МАшиНы | 1979 |
|
SU808022A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
