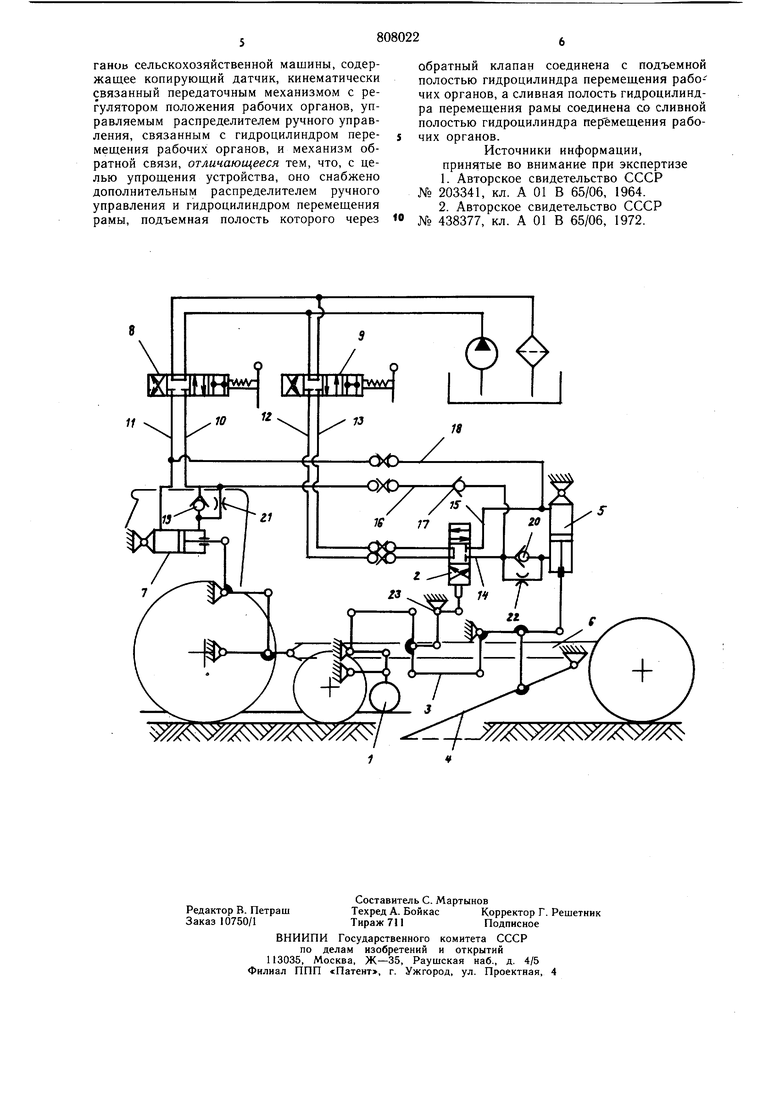
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам для автоматического регулирования положения рабочих органов сельскохозяйственных машин в вертикальной плоскости. Известно устройство для автоматического копирования рельефа, содержаш,ее датчик, гидрораспределитель автоматического регулирования, распределитель ручного управления, гидроцилиндр перемещения рабочих органов, подпружиненные обратные клапаны, комбинированный обратный клапан 1. Недостатком известного устройства является использование в нем значительного количества сложных элементов и невозможность применения его для перемещения рабочих органов и рамы сельскохозяйственной машины из рабочего положения в транспортное и наоборот при условии копирования рельефа независимо от положения рамы. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее копирующий датчик, кинематически связанный передаточным механизмом с регулятором положения рабочи С; органов, управляемым распределителем ручного управления, связанным с гидроцилиндром перемещения рабочих органов, и механизм обратной связи 2. Недостатком известного устройства является сложность его конструкции. Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что устройство для автоматического поддержания заданной глубины хода рабочих органов снабжено дополнительным распределителем ручного управления и гидроцилиндром перемещения рамы, подъемная полость которого через обратный клапан соединена с подъемной полостью гидроцилиндра перемещения рабочих органов, а сливная полость гидроцилиндра перемещения рамы соединена со сливной полостью гидроцилиндра перемещения рабочих органов. На чертеже изображена с.х„ема устройства. Устройство включает копирующий датчик 1, кинематически связанный с гидрораспределителем 2 автоматического регулирования, с которым механизмом 3 обратной связи связаны рабочие органы 4. Гидроцилиндр 5 предназначен для перемещения В вертикальной плоскости рабочих органов 4 по отношению к раме 6 сельскохозяйственной машины. Гидроцилиндр 7 предназначен для перемеш,ения рамы 6 в рабочее и транспортное положение. Управление устройством в ручном режиме осуш.ествляется при помощи двух раснределителей 8 и 9 ручного управления. Распределитель 8 гидравлически связан управляюш,ими каналами через магистрали 10 и 11 с подъемной и сливной полостями гидроцилиндра 7 перемещения рамы 6. Распределитель 9 гидравлически связан управляющими каналами через магистрали 12 и 13 с входными каналами гидрораспределителей 2, управляющие каналы которого через магистрали 14 и 15 гидравлически связаны соответственно с подъемной и сливной полостями гидроцилиндра 5 перемещения рабочих органов 4. Подъемные полости гидроцилиндров 5 и 7 гидравлически связаны магистралью 16 через обратный клапан 17. Сливные полости гидроцилиндров 5 и 7 гидравлически связаны магистралью 18. Для ограничения скорости опускания рамы .машины и рабочих органов подъемные полости гидроцилиндров 5 и 7 подсоединены к соответствующим магистралям через обратные клапаны 19 и 20 и замедлительные дроссели 21 и 22. Перемещением шарнира 23 устанавливается заданная глубина хода рабочих органов. Устройство работает следующим образом. При нахождении рабочего органа 4 на заданной глубине датчик 1 не воздействует на гидрораспределитель 2, золотник которого при этом находится в нейтральном положении. Подъемная полость гидроцилиндра 5 заперта золотником гидрораспределителя и обратным клапаном 17. Рабочий орган 4 не перемещается по отношению к раме 6 сельскохозяйственной .машины. При перемещении датчика 1 вверх механизм передачи сигнала перемещает золотник распределителя 2 вправо. Из магистрали 13 масло под давлением через распределитель 2 по магистрали 14 через обратный клапан 19 и дроссели 21 поступает в подъемную полость гидроцилиндра 5. Из сливной полости гидроцилиндра 5 масло имеет возможность слива как по цепи магистраль 15-распределитель 2 - магистраль 12 - распределитель 9, так и по цепи магистраль 18-магистраль 11-распределитель 8. Гидроцилиндр 5 перемещает рабочий орган вверх до тех пор, пока посредством механизма 3 обратной связи золотник распределителя 2 не переместится в нейтральное положение. При перемещении датчика 1 вниз механизм передачи сигнала перемещает золотник распределителя 2 влево. При этом масло под давлением из магистрали 13 через распределитель 2 по магистралям 15, 18, 11 через распределитель 8 поступает на J:лив. Масло из-под подъемной полости гидроцилиндра 5 поступает на слив по цепи замедлительный дроссель 21 - магистраль 14 - распределитель 2 - магистраль 12 - распределитель 9. Под действием сил, действующих на рабочий орган 4, совпадающих по направлению с действием силы тяжести, рабочий орган 4 опускается до тех пор, пока посредством механизма 3 обратной связи золотник распределителя 2 не переместится в нейтральное положение. Для перемещения в транспортное положение рабочих органов 4 и рамы 6 сельскохозяйственной машины распределитель 9 устанавливается в положение «Заперто (показано на чертеже), распределитель 8 устанавливается в положение, при котором масло под давлением поступает в магистраль 10, а магистраль 11 соединяется со сливом. Так как магистрали 12 и 13 перекрыты, влияние положения золотника распределителя 2, а следовательно и датчика 1, на гидроцили др 5 блокируется. Масло под давлением из магистрали 10 через обратный клапан 20 и замедлительный дроссель 22 поступает в подъемную полость гидроцилиндра 7 и по магистрали 16 через обратные клапаны 17 и 19 и замедлительный дроссель 21 поступает в подъемную полость гидроцилиндра 5. Сливная полость гидроцилиндра 5 по магистралям 18 и 11 и сливная полость гидроцилиндра 7 по магистрали 11 соединены со сливом. Происходит перемещение рабочих органов 4 и рамы 6 сельскохозяйственной машины в транспортное положение. По окончании подъема золотник распределителя 8 автоматически возвращается в нейтральное положение. Для опускания рабочих органов и рамы сельскохозяйственной мащины из транспортного положения в рабочее распределитель 8 устанавливается в плавающее положение, а распределитель 9 в положение, при котором масло под давление.м поступает в магистраль 13, и магистраль 12 соединяется со сливом. Датчик 1 находится в крайнем нижнем положении до касания почвы и на распределитель 2 поступает сигнал «Опускание. Происходит опускание рамы 6 мащины до касания ее опорными колесами почвы и опускание рабочих органов 4 до установки их на заданную глубину. Устройство готово для работы в режиме автоматического поддержания заданной глубины хода рабочих органов. Использование предлагаемого устройства упрощает гидросистему, обеспечивает надежность перемещения рамы сельскохозяйственной машины и рабочих органов из рабочего положения в транспортное, обеспечивает автоматическое копирование рельефа поля рабочими органами независимо от положения рамы. Формула изобретения Устройство для автоматического поддержания заданной глубины хода рабочих органоь сельскохозяйственной машины, содержащее копирующий датчик, кинематически связанный передаточным механизмом с регулятором положения рабочих органов, управляемым распределителем ручного управления, связанным с гидроцилиндром перемещения рабочих органов, и механизм обратной связи, отличающееся тем, что, с целью упрощения устройства, оно снабжено дополнительным распределителем ручного управления и гидроцилиндром перемещения рамы, подъемная полость которого через
обратный клапан соединена с подъемной полостью гидроцилиндра перемещения рабочих органов, а сливная полость гидроцилиндра перемещения рамы соединена со сливной полостью гидроцилиндра перемещения рабочих органов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 203341, кл. А 01 В 65/06, 1964.
2.Авторское свидетельство СССР № 438377, кл. А 01 В 65/06, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Устройство для автоматического копирования рельефа почвы рабочими органами | 1981 |
|
SU1009300A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Гидропривод грузоподъемной машины | 1979 |
|
SU889807A1 |
| Устройство для автоматического копирования рельефа почвы | 1972 |
|
SU467722A1 |
| Устройство для стабилизации глубины хода подкапывающих органов корнеклубнеуборочной машины | 1988 |
|
SU1563608A1 |
| Устройство для разрушения бетонных покрытий | 1990 |
|
SU1818424A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| Гидропривод рабочего органа уборочной сельскохозяйственной машины | 1987 |
|
SU1516043A1 |
