4
а:
О) 00
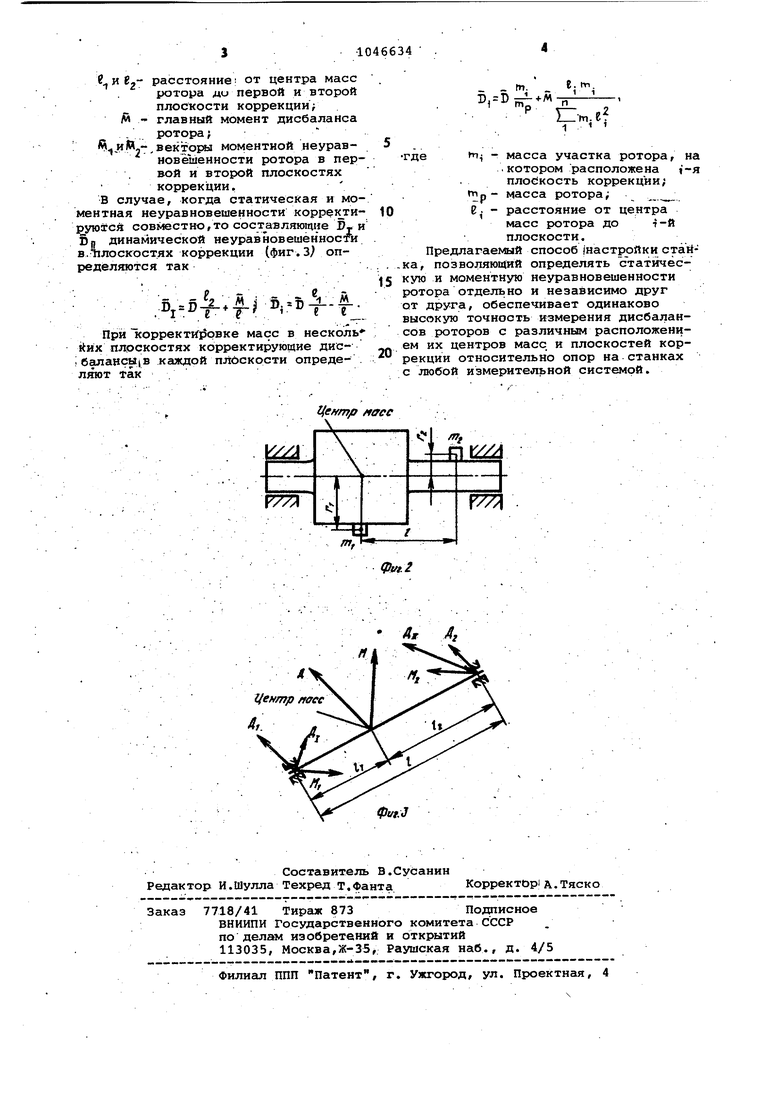
kiu Изобретение относится к баланси равочной. технике, а именно к динамической балансировке рот.оров на станках. .. -Известен способ настройки станка включающий настройку станка по эталоннрму- ротору и разделение плоскос тей коррекции С13. ; Недостатками способа являются ни кая .точность и медленная сходимост балансировки роторов, у которых отнршение расстояния между опорами , к расстоянию между плоосрстями коррекции больше четырех, а также рото ров с несимметричным или консольным расположением центра масс- относ тельнр опор. Кроме того, способ не позволяет разделить динамическую не равновешенность ротора на статичесЕсую .и моментную. Наиболее близким к изобретению п техническойсущности является спосо настройки. стан1 а для динамической балансировки роторов,; заключающий. ся в том, что по эталонному -ротору осуществляют настройку и тариров. ку первой к второй плоскости измерения станка. При этом определяют квазистатическую и моментну неурав новешенность С2 . Недостатком известного способа является то, что orf позволяет определить моментную неуравновешеинрсть ротора только после корректировки квазистатической неуравновешенности, при которой на ротор может быть внесена дополнительная к имеющейся моментная-неуравновешенность. Все это снижает точность динамической балансировки роторов. Целью изобретения является повыш ние точности динамической балансировки роторов. Указанная цель достигается тем, что согласноспособу настройки стан ка для динамической балансировки роторов, заключающемуся в том, что по этсшонному ротору осуществляют настройку и тарировку первой и .вто.рой плоскостей измерения станка, определяют положение центра McLcc эт .лонного ротора, устанавливают его на станок, закрепляют первую коррек тирующую массу в плоскости центра масс эталонного ротора, вращгцот ро. тор и по показаниям индикатора стан ка определяют первую плоскость изме рения, которая менее чурствительна к этой корректирующей массе, умень. шают влияние коррек тирующей массы на показания в этой плоскости измерения, останавливают ротор и укреп .ляют антипараллельно во второй плос кости вторую корректирующую массу, создающую равный и противоположный дисбаланс, снова вращают ротор и уменьшают влияние от двух корректир ашх масс на показания второй плоско ти измерения станка, а главный.момент дисбаланса балансируемого ротора определяют по показаниям в первой плоскости измерения, а главный вектор дисбаланса -. по показаниям во второй плоскости измерения. На фиг.1 показана схема настройки станка на измерен-ие момейтнрй неуравновейенности и тарированиеПО ста тической неуравновешенности-; на фиг. 2 - схема, настройки на измерение статической неуравновешенности и тарирование по моментной неуравновешенности ,|На фиг.З -схема корректировки статического и моментного .. дисбалансов в плоскостях коррекции. Способ.реализуется следующим об- разом. ... Определяют положение центра масс .. эталонного ротора, устанавливают его на станок, закрепляют первую корректирующую массу т. в плоскости центра масс эталонного ротора {фиг.1). Вращают ротор. и по показаниям индикатора станка определяют первую плоскость измерения, которая менее чувствит.едь.на к корректирующей массе т,. Уменьшают влияние корректирующей массы т на показания в этой плоскости Измерения,. Останавливают ротор и укрепляют антипараллельно в другой плоскости вторую корректирующую массу hi2 так, что ,т2Г2 , где т,-и 2первая и вторая корректирующие массы, и г. радиусы расположения корректирующих масс пп и т2 (фиг.2 }. Снова вращают ротор и уменьшают влияние от двух корректирующих масс на показания второй - плоскости измерения станка. При балансировке партии роторов главный момент дисбаланса определяют по показаниям в первой плоскости, измерений, а главный вектор дисбаланса - по показаниям во второй плоскости измерения. При ко.рректиррвке масс ротора, если статическая неуравновешеннйсть корректируется в одной плоскости, плоскость коррекции выбирают так, чтобы момент, создаваемый корректиpsтащeй массой относительно центра масс, уменьшал моментную неуравновешенность ротора. Если статическая и моментная неуравновешенности корректируются в двух плоскостях (фиг.З) , то их распределяют так: : где Ъ - главный вектор дисбалан са ротора; . Ь и D2 статическая неуравйовешенность pdTOf)a в йервой и второй плоскостях коррекции; . в - расстояние между плоскостями коррекции;
e И 2 расстояние от центра масс ротора до первой и второй плоскости коррекции; - главный момент дисбаланса . ротора;
,и И.-,векторы моментной неуравновешенности ротора в пер, вой и второй плоскостях
коррекции.
В случае, когда статическая и моментная неуравновешенности корректируются совместно,то сост авлякицне 5- и Ъа динамической неуравновешенности в. 11ЛОСКОСТЯХ коррекции (фиг.3 определяются так
r r-fD.
При корректировке масс в несколь йнх плоскостях корректирующие дис балансЫ|В каждой плоскости опреде- . ляют так
Центр /кгсс
D,
m.
где - масса участка ротора, на котором расположена -я плоскость коррекции; fTip - масса ротора;
е,. - расстояние от центра масс ротора до т-й плоскости.
Предлагаемый способ (настройки стай-ка, позволяющий определять статическую и моментную неуравновешенности ротора отдельно и независимо друг от друга, обеспечивает одинаково высокую точность измерения дисбалансов роторов с различным расположением их центров масс, и плоскостей коррекции относительно опор на станках с любой измерительной системой.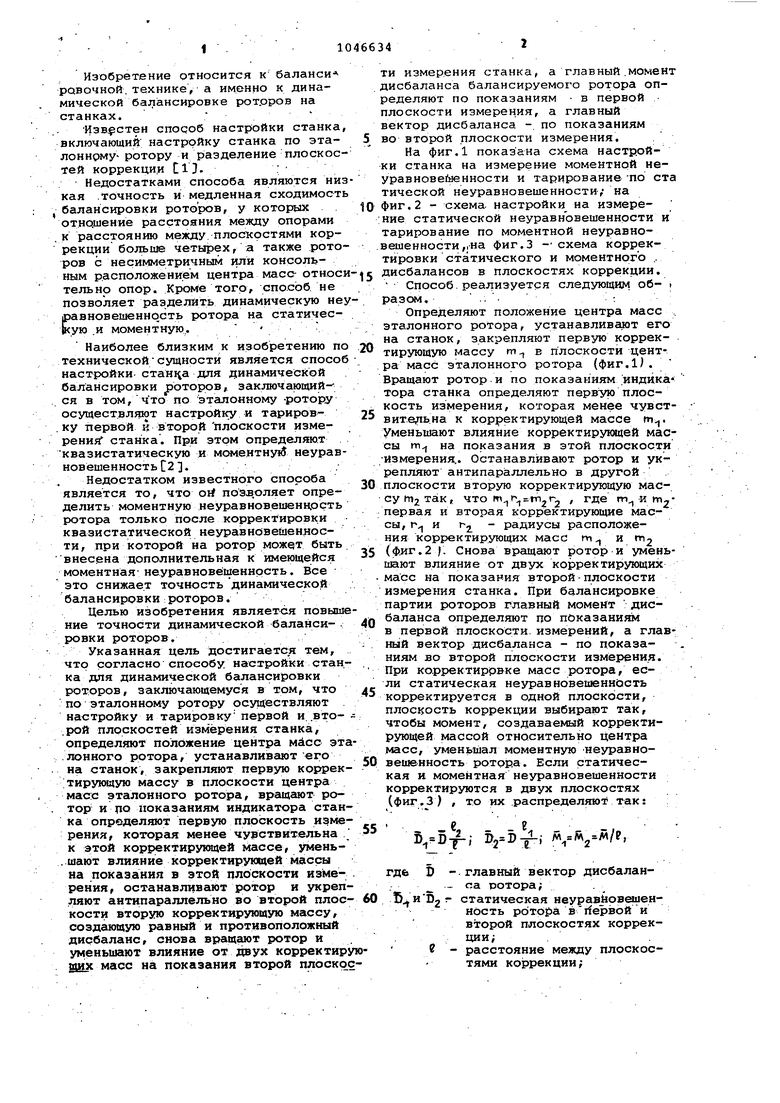
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ БАЛАНСИРОВКИ НЕСИММЕТРИЧНЫХ РОТОРОВ | 2006 |
|
RU2310177C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 1999 |
|
RU2163008C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Устройство для балансировки вращающихся деталей | 1939 |
|
SU58806A1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
СПОСОБ НАСТРОЙКИ СТАНКА ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ, заключгиощийся в том, чт.о по ; эталонному ротору Ьсуществляют. нан j стр1ойку и тарировку первойи. второй плоскостей измерения станка, от- личаюцийся тем, что, с целью повЕЛиения точности, определяют положение центра масс эталонного , устанавливают его на станок, закрепляют первую корректирующую массу в.плоскости центра масс эталонного ротора, вращают ротор и по показаниям индикатора станка определяют первую плоскость измерения, которая менее чувствительна к этой корректирующей массе, уменьшают влияние корректирующей массы на по- ; казания в этой плоскости измерения, останавливают ротор и укрепляют : антипараллельно во второй плоскости вторую корректирующую массу, созда- j юцую ргквный и противоположный дисбаланс, снова вращают ротор и уменьшают влияние от двух, корректирующих масс на показания второй плоскости измерения станка, а главный мо- ; мент дисбаланса балансируемого ротора определяют по показаниям в первой плоскости измерения, а главный лектор дисбаланса - по показани51м во второй плоскости измерения.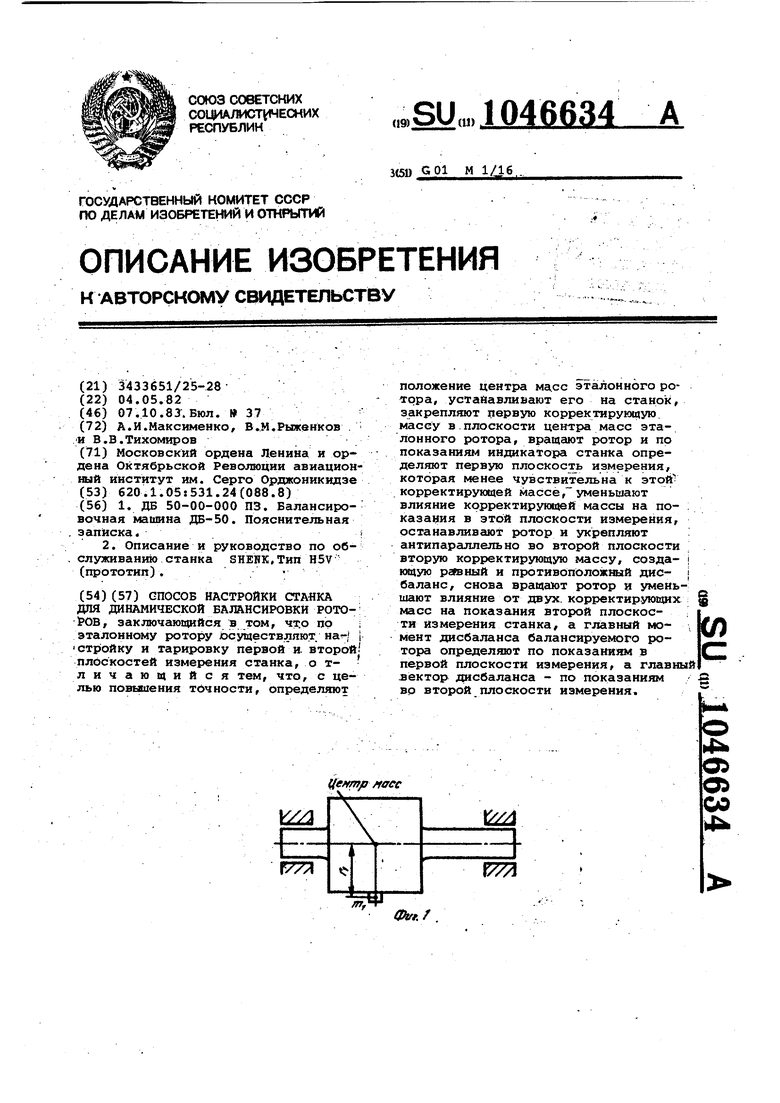
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Описание и руководство по обслуживанию станка SHEHK,Тип H5V (прототип).. | |||
