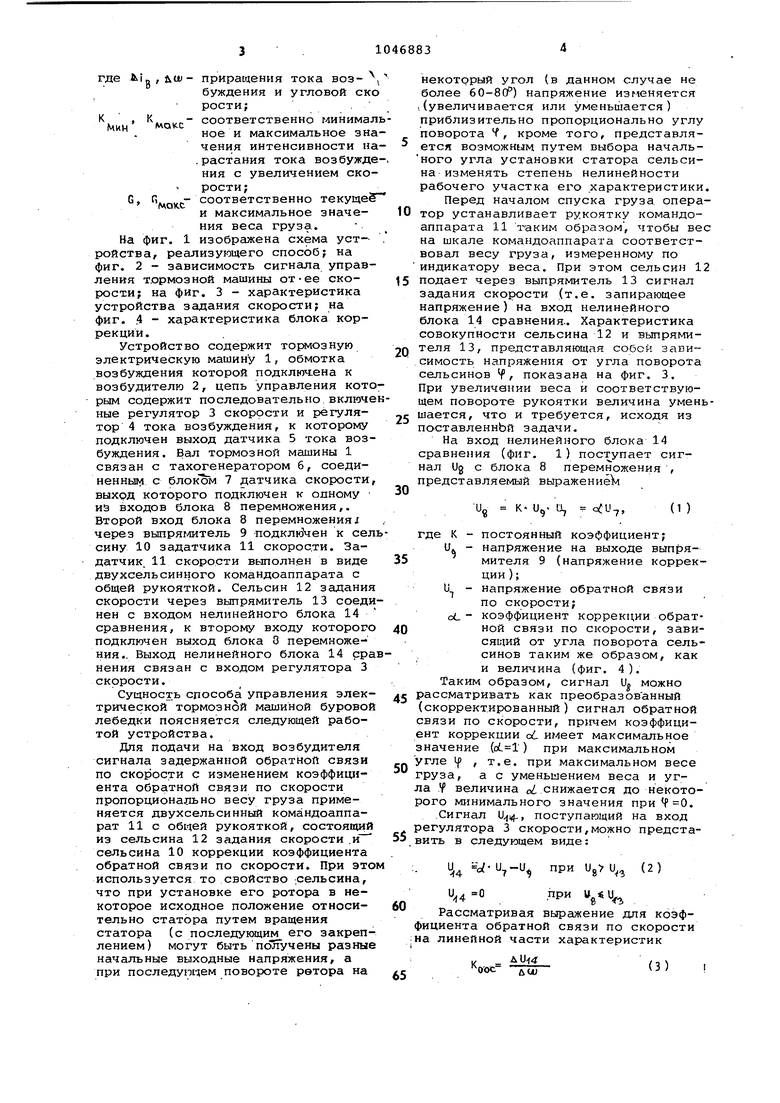
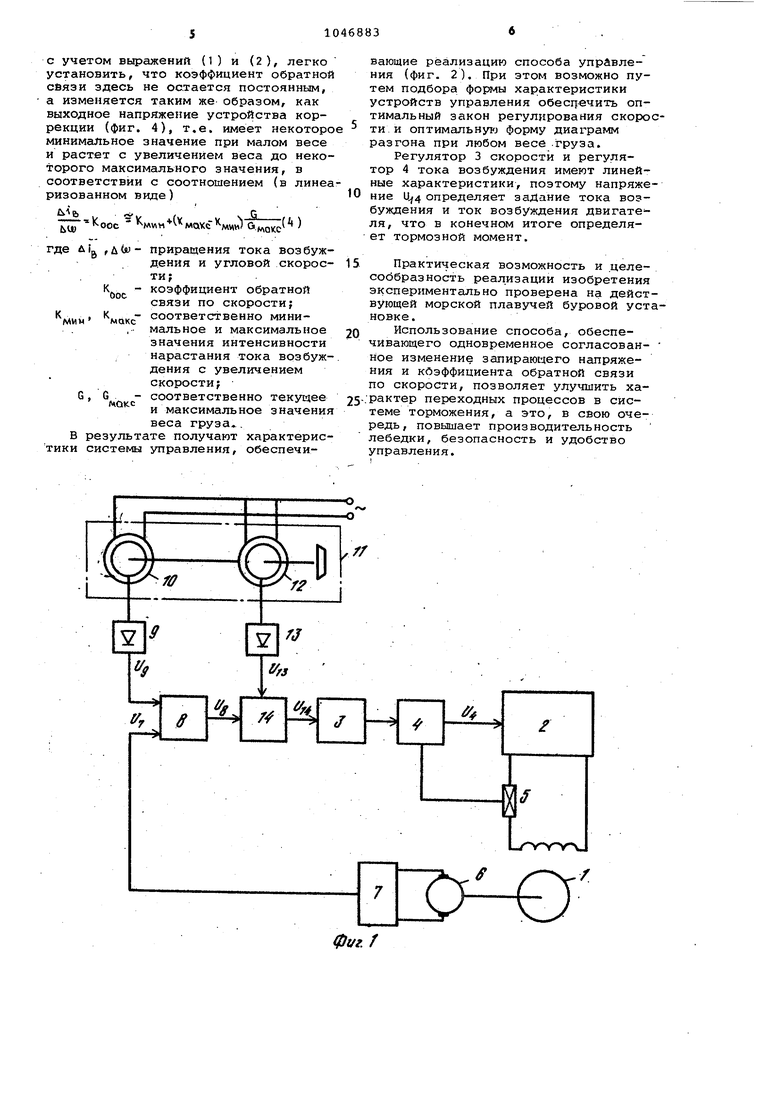
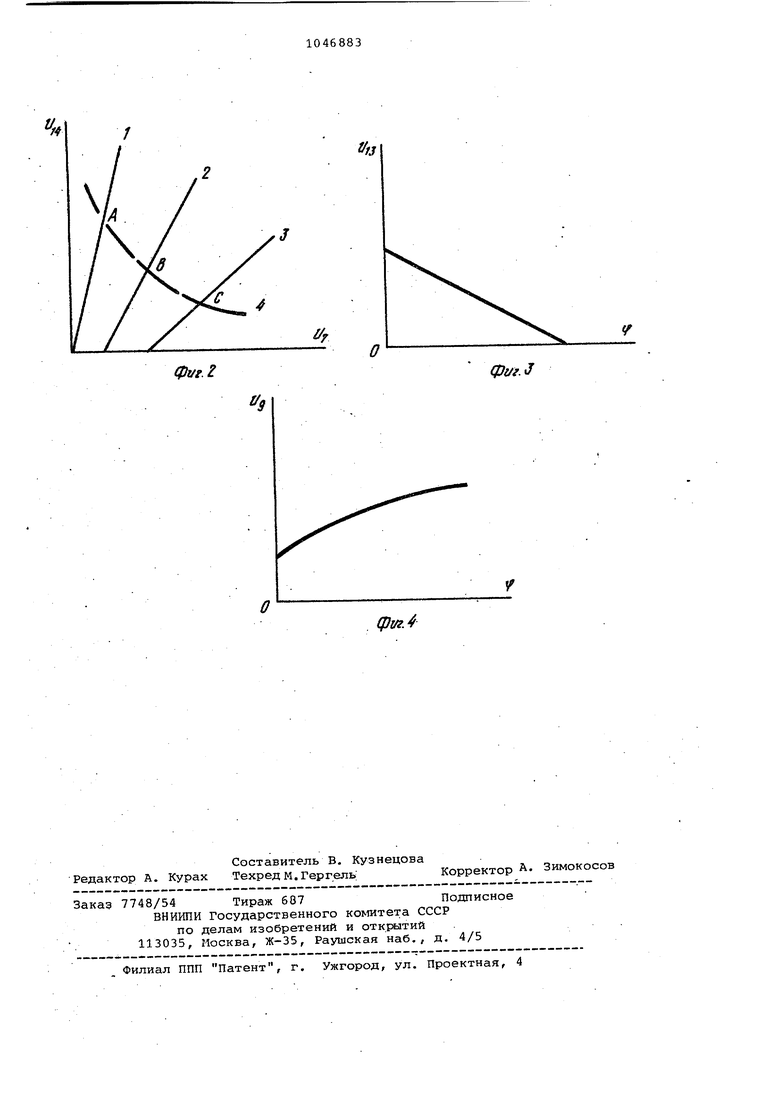
Изобретение относится к электро технике и может найти применение в системе управления буровой лебедки Для торможения буровой лебедки при спуске бурильной или обсадной колонны в скважину предусматривает ся обычно (помимо основного механи ческого тормоза ) вспомогательная гидродинамическая или электрическая тормозная машина (ЭТМ), соединяемая с валом барабана лебедки и зоспринимающая энергию, .развиваемую при спуске груза, а буровых устано ках с электроприводом постоянного тока благодаря простоте кинематичес кой схемы возможно в качестве ЭТМ использовать электродвигатель лебед ки, работающий в режшле динамического торможения. . Известны буровые установки, в которых используются схемы ручного управления ЭТМ без каких-либо элементов автоматизации, что снижает стоимость оборудования С ЗНедостатки устройств - усложнен ная работа оператора и повышенная опасность возникновения недопустимых режимов. . Перед системой управления ЭТМ ставятся две основные задачи: обес печение рационального закона изменения установившейся скорости лебедки при изменении веса груза и обеспечение при- разных весах достаточно интенсивного разгона, но б перерегулирования скорости. В системах торможения буровой лебедки с целью наилучшего использ вания мощности ЭТИ и повышения про изводительности лебедки Установившаяся скорость спуска должна выбираться тем большей, чем меньше вес колонны. Наиболее рациональным зак ном регулирования скорости в зависимости от веса является закон пос тоянства мощности. Для обеспечения наиболее интенсивного разгона теоретически необходимо обеспечить о сутствие тормозного момента в период разгона и мгновенное приложение момента при достижении зещан ной скорости. Практически таких ,процессов достигнуть невозможно и приходится удовлетворяться ВОЗМО)Хным приближением к ни. Известен способ управления тормозной электрической машиной бурово лебедки с управляемым возбудителем в котором измеряют скорость тор- i мозной машины, формируют из него на р;гжение обратной связи по скорости сравнивают его с опорным напряжением, уровень которого изменяют, регулируя тем самьзм скорость опуска ния груза С 2 3. Наиболее близким по технической сущности к предлагаемому является способ управления тормозной электри ческой машиной буровой лебедки с управляемым возбудителем, согласно которому измеряют скорость тормозной машины, с задержкой по скорости формируют напряжение обратной связи по скорости путем сравнения напряжения, пропорционального измеренной скорости, с опорным напряжением, при этом изменяют величину задержки в функции веса груза, изменяя величину опорного напряжения, и воздеиствуют на ток возбуждения тормозной машины С3 J Недостатком известных техничес-; ких решений является то, что коэффициент обратной связи по скоро.сти на линейной части характеристик не изменяется с изменением веса, в результате чего исключается возможность получения оптимальной формы процессов разгона как при легком, . . так и при тяжелом грузе. Если система настроена так, чтобы обеспечивалась оптимальная диаграмма разгона при легком грузе, то при тяжелом грузе имеет место опасное и потому, недопустимое перерегулирование скорости. Если же система настроена так, чтобы обеспечивалась оптимальная диаграмма при тяжелом грузе, то при легком грузе разгон значительно затягивается. По условиям безопасной работы на практике приходится принимать второй вариант настройки, хотя при этом производительность работы лебедки понижается. Цель изобретения - повышение производительности лебедки путем обеспечения максимально допустимых у;скорений. ., Поставленная цель достигается тем, что в способе управления тормозной электрической машиной .буровой лебедки, согласно которому измеряют скорость тормозной магчины, с зад ржкой по скорости форглируют напряжение обратной связи по скорости путем сравнения напряж.ения, пропорционального измеренной скорости, с опорным напряжением, при этом изменяют величину задержки в функции веса груза, изменяя величину опорного напряжения, и воздействуют на ток возбуждения тормозной машины, одновременно с. задержкой по скорости изменяют интенсивность нарастания тока .возбуждения с увеличением : скорости в зоне скоростей, превышающих велит.1ину задержки, от минимального до максимального значения ё функции в€;са груза в соответствии с соотног ением KMWM- MOKC MMH) где MgffvU- приращения тока возбуждения и угловой ск рости;. . .r,vr. соответственно минима MUU WQKC ное и максимальное зн чения интенсивности н .растения тока возбужд ния с увеличением ско рости; G, Г, - соответственно текущее и максимальное значения веса груза. На фиг. 1 изображена схема уст-ройства, реализующего способ; на фиг. 2 - зависимость сигнала управления тормозной машины от-ее скорости; на фиг. 3 - характеристика устройства задания скорости; на фиг. .4 - характеристика блока коррекции. Устройство содержит тормозную электрическую машину 1, обмотка возбуждения которой подключ.ена к возбудителю 2, цепь управления кото рым содержит последовательно,включе ные регулятор 3 скорости и регулятор 4 тока возбуждения, к которому подключен выход датчика 5 тока возбуждения. Вал тормозной мгииины 1 связан с тахогенератором б, соединенным с блоком 7 датчика скорости выхрд которого подключен к одному и5 входов блока 8 перемножения,. Второй вход блока 8 перемноженияi через выпрягФ1тель 9 -подклк чен к сел сину 10 задатчика 11 скорости. Задатчик 11 скорости выполнен в виде двухсельсинного командоаппарата с общей рукояткой. Сельсин 12 задания скорости через выпрямитель 13 соеди нен с входом нелинейного блока 14 сравнения, к второму входу которого подключен выход блока О перемножения.. Выход нелинейного блока 14 сра нения связан с входом регулятора 3 скорости. Сущность способа управления электрической тормозной машиной буровой лебедки поясняется следующей работой устройства. Для подачи на вход возбудителя сигнала задержанной обратной связи по скорости с изменением коэффициента обратной связи по скорости пропорционально весу груза применяется двухсельсинный командоаппарат 11 с обпей рукояткой, состоящий из сельсина 12 задания скорости .и сельсина 10 коррекции коэффициента обратной связи по скорости. При это используется то свойство -сельсина, что при установке его ротора в некоторое исходное положение относительно статора путем вращения статора (с последующим его закреплением) могут быть получены разные начальные выходные напряжения, а при последующем повороте ротора на некоторый угол (в данном случае не более 60-8СР) напряжение изменяется .(увеличивается или уменьшается) приблизительно пропорционально углу поворота V, кроме того, представляется возможным путем выбора начального угла установки статора сельсина изменять степень нелинейности рабочего участка его характеристики. Перед началом спуска груза оператор устанавливает рукоятку командоаппарата 11 таким образом, чтобы вес на шкале командоаппарата соответствовал весу груза, измеренному по индикатору веса. При этом сельсин 12 подает через выпрямитель 13 сигнал задания скорости (т.е. запирающее напряжение) на вход нелинейного блока 14 сравнения.. Характеристика совокупности сельсина 12 и выпрямителя 13, представляющая собой зависимость напряжения от угла поворота сельсинов V, показана на фиг. 3. При увеличении веса и соответствующем повороте рукоятки величина уменьшается, что и требуется, исходя из поставленнЬп задачи. На вход нелинейного блока 14 сравнения (фиг. 1) поступает сигнал Ug с блока 8 перемножения , представляемый выражение Ug К- и,. 11, - , (1 ) где К - постоянный коэффициент; и - напряжение на выходе выпрямителя 9 (напряжение коррекции ); U..J - напряжение обратной связи по скорости; оС - коэффициент коррекции обрат ой связи по скорости, зависящий от угла поворота сельсинов таким же образом, как и величина (фиг. 4). Таким образом, сигнал U можно ассматривать как преобразованный (скорректированный) сигнал обратной связи по скорости, причем коэффицинт коррекции oL имеет максимальное начение () при максимальном гле If , т.е. при максимальном весе руза, а с уменьшением веса и уга V величина oi снижается до некотоого минимального значения приЧ 0. .Сигнал поступающий на вход егулятора 3 скорости,можно предстаить в следующем виде: при (2) 4(4 ° .при Рассматривая выражение для коэфициента обратной связи по скорости а линейной части характеристик V. - Ц oot- -JUT
с учетом выражений (1) и (2), легко установить, что коэффициент обратной связи здесь не остается постоянным, а изменяется таким же образом, как выходное напряжение устройства коррекции (фиг. 4), т.е. имеет некоторо минимальное значение при малом весе и растет с увеличением веса до некоторого максимального значения, в соответствии с соотношением (в линеаризованном виде)
Мь ..
MWG.
махе м«и)
К
оос
MWM
&U)
де uL ,д(«- приращения тока возбуждения и угловой скорости;
К. - коэффициент обратной
бос связи по скорости; соответственно миниК
MQKC
мим мальное и максимальное значения интенсивности нарастания тока возбуждения с увеличением скорости;
G, G - соответственно текущее и максимальное значения
веса груза.
В результате получают характерисики системы управления, обеспечивающие реализацию способа управления (фиг, 2). При этом возможно путем подбора формы характеристики устройств управления обеспечить оптимальный закон регулирования скорости и oптимaльнylJ форму диаграмм разгона при любом весе -груза.
Регулятор 3 скорости и регулятор 4 тока возбуждения имеют линейные характеристики, поэтому напряжение определяет задание тока возбуждения и ток возбуждения двигателя, что в конечном итоге определяет тормозной момент.
5. Практическая возможность и .целесообразность реализации изобретения экспериментально проверена на действующей морской плавучей буровой установке.
Использование способа, обеспечивающего одновременное согласованНое изменение запирающего напряжения и коэффициента обратной связи по скорости, позволяет улучшить ха.рактер переходных процессов в системе торможения, а это, в свою очередь, повышает производительность лебедки, безопасность и удобство управления.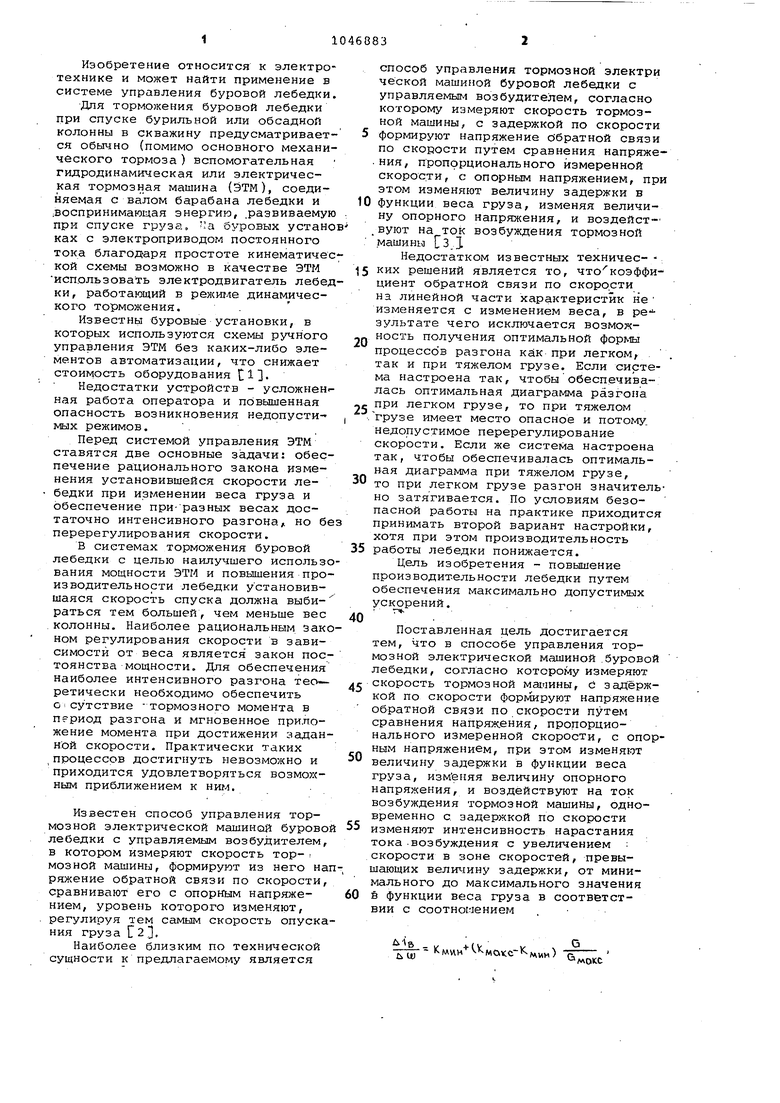
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления электротормозной машиной бурового агрегата | 1982 |
|
SU1082927A1 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Способ управления тиристорным электроприводом постоянного тока буровой лебедки | 1986 |
|
SU1394384A1 |
| Бесконтактная замкнутая система регулирования скорости двигателя постоянного тока | 1958 |
|
SU121166A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ БУЮВОЙ ЛЕБЕДКИ с управляемым возбудителем, согласно которому измеряют скорость тормозной машины, с задержкой по iскорости формируют напряжение обратной связи по скорости путем сравне1ния напряжения, пропорционального .измеренной скорости, с опорным напряжением, при этом изменяют велИ чину задержки в функции веса груза, изменяя величину опорного напряжения, и воздействуют на ток возбуждения тормозной машины, отличающийся тем, что, с целью повышения производительности лебедки путем обеспечения максимально допустимых ускорений, одновременно с задержкой по скорости изменяют интенсивность нарастания тока возбуждения с увеличением скорости в зоне скоростей, превышающих величину задержки, от минимального до максимального значений в функции веса груза в соответствии с соотноI шением 1&--к (ic мачс ммн I MWH - AAVIH V/ 0 щ «,. v--( NiMH ( G, где ikift ,.uU - приращения тока возбуждения и угловой скорости; i к соответственно миниWOKC мц мальное и максимальное значения интенсивности нарастания тока возбуждения с увеличением скорости; соответственно текущее мопс и максимальное значения веса груза.
f
1/7
фиг. 2
Фиг.З
фиг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Моцохейни Б.И | |||
| Зарубежные буровые установки с автономным электрическим приводом | |||
| Обзор зарубежной литературы | |||
| М., изд-во ВНИИОЭНГ, 1968 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , Ерохин | |||
| В.И | |||
| и др. | |||
| Справочник электромонтера буровой .установки | |||
| М., Недра, 1974, с.230 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Электропривод буровых лебедок | |||
| М., Недра, 1978, с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
