Изобретение относится к автоматизированным системам управления те нологическими процессами (АСУ ТП с помощью управляющих вычислительных машин IУВМ) и может найти применение в АСУ ТП широкополосных ста нов горячей прокатки ( ШСГП). Известна система управления технологическим процессом, содержащая блок датчиков УВМ, блок локальных регуляторов, пульт управления,, вы ходной преобразователь, блок испол нительных механизмов, дискретный интегратор с памятью и блок аварийного отключения, причем выход блока датчикоЁ соединен с первьши входами блока локальных регуляторов и УВМ, второй вход которой соединен .с первым выходом пульта управления, втор и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя, первый вход - с выходом блока аварийного отключения, вход которого с динен с первым выходом УВМ, второй выход которого соединен с третьим входом выходного преобразования, четвертый вход которого соединен с выходом блока локальных регуляторов второй вход которого соединен с вых дом дискретного интегратора, эыход выходного преобразования соединен со входсяи блока испытательных механизмов, четвертый выход пульта управления соединен с первым входом дискретного интегратора с памятью, второй выход УВМ соединен со вторым входом дискретного интегратора, а третий выход УВМ соединен со вторым входом пульта управления t. Известная система имеет недостаточную надежность работы, связанную с отсутствием в ней средств, позволяющих отключать канал уЯравления от УВМ при возникновении иска лений на ее . Результаты функционирования программного обеспечения (по) и полученные при этом данные характеризуются некоторой ограниченной достоверностью. Первичными причинами снижения достоверности обработанной управляющей информации на выходе УВМ могут быть искажение исходных данных, поступаю щих от внешних абонентов; невыявлен ные ошибки в ПО; непредусмотренные воздействия обслуживающего персонала (, оператора . Указанные причины могутявляться источниками возникновения аварийных ситуаций на объекте управления в ре зультате, ; например, проявления скр той ошибки ПО. При этом технические средства УВМ-работают исправно.След ствием проявления ошибок в ПО в условиях применения УВМ в АСУ ТП ШСГИ может являться, например, поломка нажимных винтов, забуривание полосы и др., что аедет к снижению производительности работы стана, потерям металла. Цель изобретения - повыше ние надежности работы систег-м. Указанная цель достигается тем, что в систему управления технологическим процессом дополнительно введены интегратор и нуль-орган, причем второй выход УВМ соединен с входом интегратора, выход которого соединен со входом нуль-органа, выход которого соединен с третьим входом схемы ШИ блока аварийного отключения. Применение - интегратора позволяет суммировать напряжение управляюще. го сигнала во. времени и тем самым иметь на выходе последнего сигнал, по которому можно судить о правильности вьщачи управляющих сигналов УВМ. Затем используется известное свойство центрированных стационарных случайных процессов, заключающееся в том, что математическое ожидание случайной величины - нуль, следовательно при нормальной работе системы результатом суммирования управляющих сигналов с УВМ должен быть нуль или величина, близкая к нему. При сбоях ПО или УВМ, когда система начинает выдавать неправильные управляющие сигналы на объект регулирования, на выходе интегратора спустя некоторое время, определяемое выбранной постоянной интегрирования, появляется сигнал, отличный от нуля, по которому можно судить о возможности сбойной ситуации в системе. Ввод в систему нуль-органа позволяет фиксировать момент возникновения сигнала,отличного от нуля, на выходе интегратора. Связь выхода нуль-органа с третьим входом схемы ИЛИ блока аварийного отключения позволяет производить отключение УВМ от объ.екта в случае возникновения сбоя ПО. На чертеже представлена блок-схема системы управления технологическим процессом. . Система содержит блок 1 датчиков УВМ 2, блок 3 локальных регуляторов, пульт 4 управления, выходной преобразователь 5, блок 6 исполнительных механизмов, дискретный интегратор 7 с памятью, блок 8 аварийного отклонения, содержащий элемент 9 задержки на включение, элемент 10 задержки на отключение, схему 11 НЕ и схему 12 ИЛИ, интегратор -13 и нуль-орган 14, причем выход блока 1 датчиков соединен с первыми входами УВМ 2 и блока 3 локальных регуляторов,второй вход УВМ 2 соединен с первым выходом пульта 4 управления, второй и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя 5, четвертый выход --с первым входом дискретного интегратора а первый вход - с выходом блока 8 аварийного отключения, который явля ется выходом схемы 12 ИЛИ, первый вход которой соединен с выходом эле мента 9 задержки на включение, а второй - с выходом схемы 11 НЕ, вхо которюй соединен с выходом элемен та 10 задержки на отключение, а вхо ды элементов 9 и 10 соединены с пер вым выходом УВМ 2, второй вход кото рой соединен с третьим входом выход ного преобразователя 5, четвертый вход которого соединен с выходом блока 3 локальных регуляторов, втор выход УВМ соединен со входом интегр тора 13, выход которого соединен со входом нуль-органа 14, выход которо го соединен с третьим входом схемы 12 ИЛИ. Интегратор 13 служит для суммирования управляющего сигнала, имеющего случайный характер. Постоянная интегрирования выбирается из условия конкретного технологического процес са. . ч. Нуль-орган 14 служит для фиксиро вания момента появления на выходе и тегратора 13 заданного напряжения при котором нуль-орган 14 выбирается в соответствии с параметрами технологического процесса. Устройство работает следующим образом. Режим работы системы задается one ратором с помощью пульта 4 управления. Он же задает исходные данные прокатки: толщину и ширину полосы, допуски, скорость прокатки и т.п. Выбираются также постоянная интегрирования интегратора 13, порог срабатывания нуль-органа 14. УВМ 2 рас-.. считывает для выбранных исходных дай ных оптимальные уставки начальной на стройки локальных -регуляторов 3, которые выдаются на пульт 4 по треть ему выходу УВМ 2. В исходном состоянии на выходах интегратора 13 и нуль-органа 14 нул Второй выход УВМ 2 подключен через выходной преобразователь 5 ко входу блока 6 исполнительных механизмов. При входе полосы в зону действия датчиков 1, например, в прокатную клеть, сигналы от последних поступают в УВМ 2 для обработки по заданным алгоритмам, в результате чего УВМ выдает управляющий сигнал, поступающий на третий вход блока 5, откуда после преобразования, управля- ющий сигнал поступает на исполнительные механизмы 6, например, на нажимные винты клети. Одновременно . управляющий сигнал поступает на вход интегратора 13. При нормальной работе на первом выходе УВМ появляется последовательность импульсов, .которые поступают на входы элементов 9 и 10 задержки. На выходе элемента 9 задержки 10 - постоянно нуль, а на выходе элемента 10 задержки 10 - единица, что обусловлено наличием на входах элементов. 9 и 10 задержки сигнала с первого выхода УВМ 2. На выходе схемы 12 ИЛИ - нуль, так как на всех ее трех входах Нули. При нормальной работе ПО и. нормальном ходе технологического процесса на вход интегратора 13 поступают сигналы разной полярности, распределенные по нормальному закону, в результате суммирования которых на выходе интегратора 13 устанавливается величина, близкая к нулю, или в пределах, устанавливаемых оператором.При сбое ПО системы нормальный закон распределения управляющих сигналов на выходе УВМ, Как правило, нарушается. Это приводит к тому, что на вход интегратора 13 поступают сигналы преимущественно одного знака, что приводит через некоторое время к воз:Никновению на его выходе сигнала, отличного от нуля или другой выбранной величины. Как только величина сигнала на выходе интегратора 13 достигает величины порога срабатывания нуль-органа 14, на выходе последнего возникает единица, которая поступает на третий вход схемы 12 ИЛИ, в пульт 4 управления, отключается от УВМ канал управления и подключается канал управления-от локальной системы. Единица с выхо-. да схемы 12 ИЛИ, попадая на первый вход пульта 4, подключает на второй вход выходного преобразователя 5 выход локального регулятора 3. Управляющее воздействие в регуляторе 3 рассчитывается на основании информации с датчиков 1, уставок пульта 4, рассчитанных при пуске системы управления, а также управляющих сигналов УВМ, выдавае1 ых последней в момент, предшествующий сбою, которые хранились в памяти интегратора 7. В соответствии с заданным алгоритмом регулятор 3 вырабатывает управляющий сигнал, поступающий после преобразования в блоке 5 на вход исполнительных механизмов. При сбое технических средств, т.е. собственно УВМ, прекращается генерация импульсов на первом выходе УВМ. В случае прекращения генерации на первом выходе УВМ появляется отличный от нуля потенцисьл, по истечении времени задержки на выходе элемента 9 появляется единица, которая через схему 12 ИЛИ поступает на
первый вход пульта 4 управления, В случае прекращения генерации от УВМ по истечении времени задержки на выходе элемента 10 появляется нуль, который инвертируется схемой 11 НЕ, единица через схему 12 ИЛИ поступает на первый вход пульта 4. В результате чего в обоих рассмотренных случаях канал управления от УВМ отключается, включается канал управления от локального регулятора 3.
Управление от локального регулятора 3 может производиться как в случае сбоя ПО, так и по инициативе оператора. В последнем случае оператор с помощью пульта 4 задает начальные уставки и включает локальный регулятор 3.
Сигналы датчиков 1 поступают на первый вход блока 3 регуляторов, который вырабатывает управляющие сигна лы, поступающие в блок 5 преобразователей на исполнительные механизмы 6.
Б режиме ручного управлени oneратор с помощью пульта 4 подает на входы преобразователя 5 управляющие уставки, которые после преобразования поступают на исполнительные механизмы 6.
I .
Таким образом, применение интегратора, подключенного к управляющему выходу УВМ и нуль-органа, подключенного к выходу интегратора, позволяет идентифицировать ситуацию сбоя УВМ по ПО и отключать канал управления от УВМ и тем саким повысить вероятность предотвращения поломки технологического оборудования, т.е. повысить надежность управления технологическим процессом.
Применение данной системы позволи повысить надежность функционирования АСУ ТП в случаях сбоев ПО по сравнению с базовым объектом АСУ ТП регулирования толщины полосы 111СГП.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления технологическим процессом | 1981 |
|
SU954128A1 |
| Система управления технологическим процессом | 1988 |
|
SU1524952A2 |
| Устройство для аварийного управления регулирующими органами | 1978 |
|
SU894677A1 |
| Система управления технологическим процессом | 1978 |
|
SU702379A1 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Устройство диспетчерского управления распределением воздуха в горных выработках метанообильных угольных шахт | 1986 |
|
SU1423745A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| Устройство сопряжения функциональных блоков систем управления | 1986 |
|
SU1441347A1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2454683C1 |
СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ПО авт. св. № 954128, отличающаяся тем, что, с целью повышения надежности работы системы, она дополнительно содержит интегратор и нульорган, причем второй выход управляющая вычислительной машины соединен со входом интегратора, выход которого соединен со входом нульоргана, выход которого соединен с третьим входом схемы ИЛИ блока аварийного отключения. W itS ел CD :п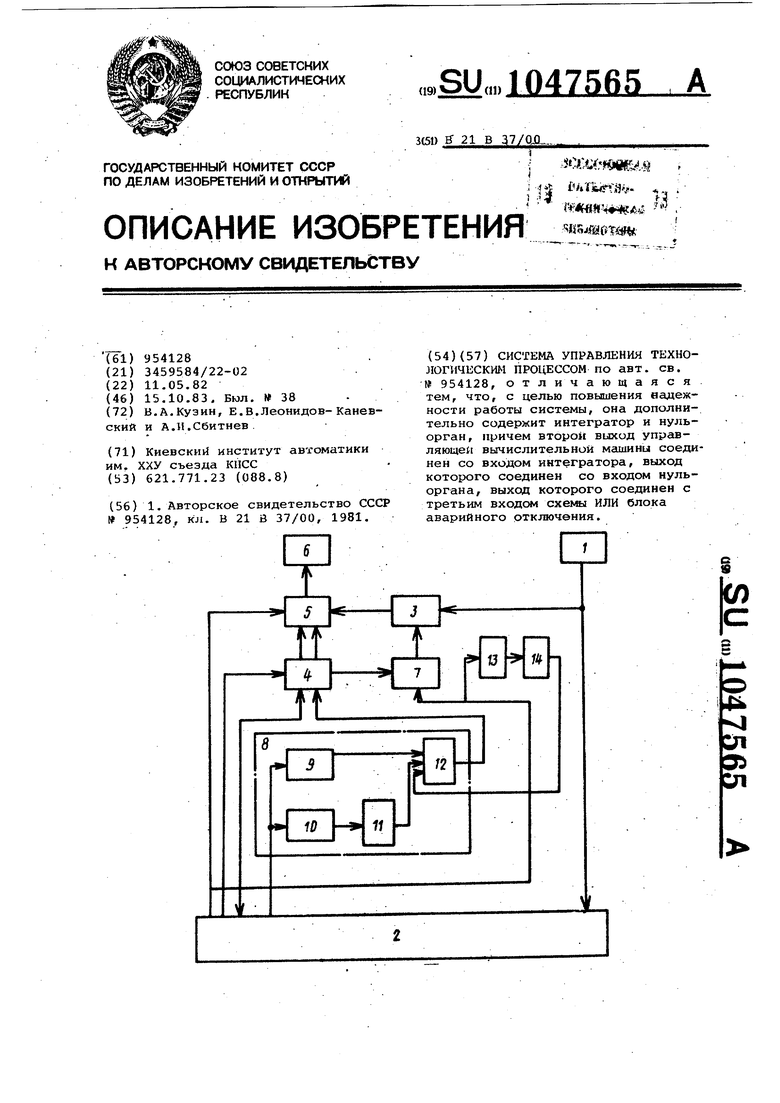
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления технологическим процессом | 1981 |
|
SU954128A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
