Изобрете)ие относится к автоматизированным системам управления технологическими процессами (АСУГ1Т) с помощью управляющих вычислительных машин (yBjVi) и может найти нри.менение в АСУТП широкополосных станов горячей прокатки (ШСГП).
Цель из(;бретения - повышение надежности работы системы.
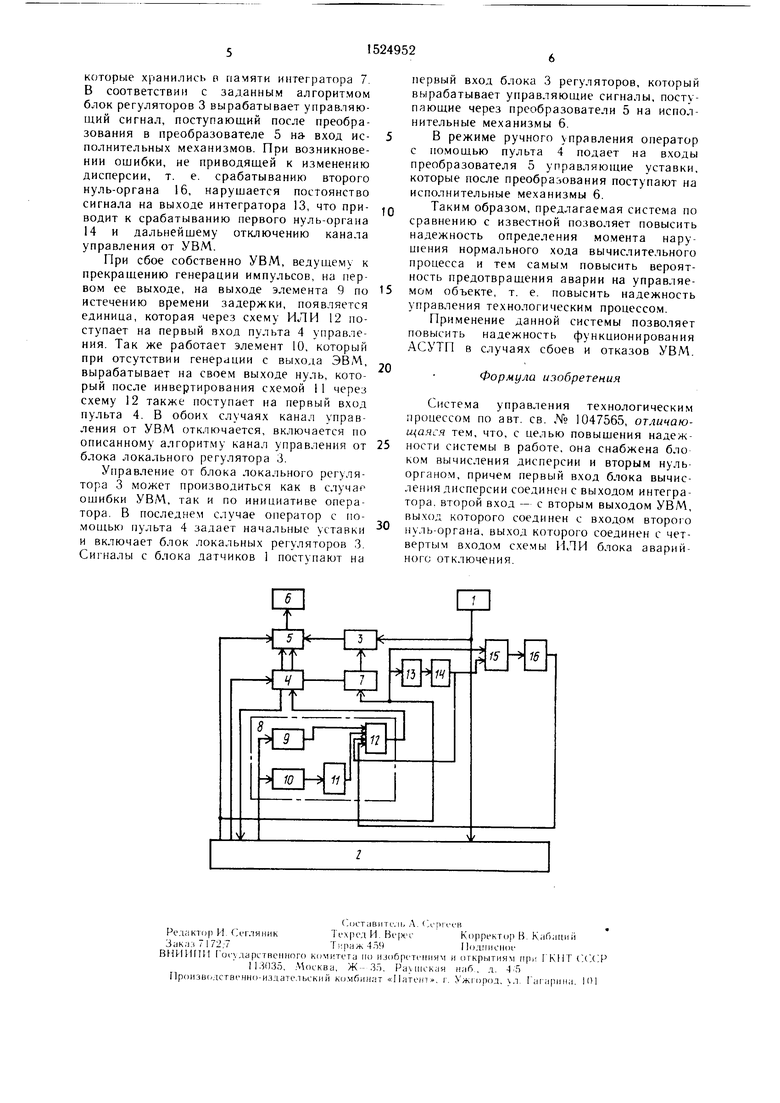
На чертеже представлена предлагаемая система . управления те.хнологическим процессом.
Система содержит блок 1 датчиков УВ, 2, блок 3 локальных регуляторов, пульт 4 управления, вы.ходной преобразователь 5, блок 6 исполнительных механизмов, дискретный интегратор 7 с памятью, блок 8 аварийного отключения, содержащий элемент 9 задержки на включение, элемент 10 задержки на отключение, схему НЕ 1 1 и схему ИЛИ 12, интегратор 13, первый нуль-орган 14, блок 15 вычисления дисперсии и второй нуль- орган 16, причем выход блока 1 датчиков
соединен с первы.ми входами УВЛД 2 и б.тока 3 локальных регуляторов, второй вход УВ.М 2 соелТинен с первым выходом пу, 4 управления, второй и третий выходы которого соответственно соединены с первым и вторым входами выходного преобразователя 5, четвертый выход с первым входом дискретного интегратора 7, а первый вход с выходом блока 8 аварийного отключения, которьи является выходом схемы И„ЧИ 12. первый вход которой соединен с BI Iходом элемента 9 задержки на включение, а второй - с выходом схе.мы НЕ 11, вход которой соединен с выходом элемента 10 задержки на отключение, а входы эле.ментов 9 и 10 задержки соединены с первым выходом УВ.Ч 2, второй вход которой соединен с третьим входом выходного преобразователя 5, четвертый вход которого соединен с выходом блока 3 лока.тьных регуляторов, второй выход УВ.М соединен с входом инте1 ратора 1.3. вход которого соединен со входом первого органа 14, выход которого соединен с третьим входом схемы ИЛИ 12. первый вход б.тока 15
(УЧ
o
со ел to
N3
вычисления дисперсии соединен с выходом интегратора 13, второй вход - со вторым выходом УВМ 12, а выход - со входом второго нуль-органа 16, выход которого соединен с четвертым входом схемы ИЛИ 12.
Блок 15 вычисления дисперсии служит для вычис,:1ения дисперсии управляющего си1-11ала УВМ 2. Блок может быть реализован на основе программируемого микропроцессора C.W 1800 и содержит платы, с по- мощью которых можно реализовать арифметические операции, содержанхнеся в зависимости, например, на языке ФОРТРАН следующим образом:
DL ENS1ON D, XI, ХМ, N
( (1/( 1))(Х1- ХЛ) 2),
гдеХ1 Х, текущее значение унравляюще го сигнала;
Х.Х среднее значение управляющего сигна.ча.
BTopoi i ну.:1ь-орган. 16 служит для фиксирования момента появления на выходе блока 15 вычисления дисперсии величины, превышающей заданную. Величина опорного на- нряження выбирается из условия данного технологического процесса, т. е. связана с ИСХОДНО) дисперсией, например, подката чис- roBoii группы клетей ШСГП, выбранных ал1Ч)|)итмов управления и т. п.
Ввод в систему блока вычисления дисперсии и второго нуль-органа позволяет повысить надежность работы системы за счет 11овын1ения надежности индентификации необнаруженной ошибки в ПО или сбоя УВМ путем определения момента отклонения дисперсии управляющего сигнала на недопустимую величину.
Система работает следуюп1им образом.
В УВЛ за ружается программное обеспечение системы.
Режим работы задается оператором с HOMoiuijK) пульта 4 управления. О |ератором же вводнгся исходные данные прокатки: голщина и П1ирина полосы, допуски, скорость прокатки и 1. п. Выбираются также постоянная инте1 рирования интегратора 13, пор()н срабагываиия первого и второго iiyjib-ojiraHOB 14, 16.
После старта системы, УВЛА 2 рассчитывает для выбранных исходных данных онтимальн1 1е условия начальной настройки б, 1ока 3 локальных регуляторов, которые выдаются на пульт 4 по третьему выходу УВЛ 2.
В исходном состоянии на выходах инте- ipaTOpa 13, блок 15 вычисления дисперсии, первого и второго ну,,ть-органов 14 и 16 нули. Второй выход УВЛ 2 подключен через вы- ходной преобразователь 5 ко входу блока 6 испо.пните.тьиых механизмов. При входе полосы в зону де11ствия блока датчиков 1, на- || 1имер, в прокатную клеть чистовой группы
0
0
5
у
5
0
5
0
ШГСП, сигналы от датчиков поступают в УВМ 2 для обработки по заданным алгоритмам, в результате чего УВМ выдает управ- ляюоций сигнал, поступающий на третий вход преобразователя 5, откуда после преобразования, сигнал поступает на блок исполнительных механизмов 6, например, нажимные винты клети, направляющие линейки или другие механизмы. Одновременно управляющий сигнал поступает на вход интегратора 13 и первый вход блока 15 вычисления дисперсии. При нормальной работе на первом выходе УВМ появляется генерация последовательности импульсов, которые поступают на входы элементов 9 и 10 задержки. Па выходе последних соответственно будут присутствовать логические нуль и единица, что обусловлено наличием на вхОдТах элементов 9 и 10 сигнала с первого выхода УВМ 2. На выходе схемы 12 ИЛИ также - нуль, так как на всех ее четырех входах нули. При нормальной (безошибочной) работе УВК на вход интегратора 13 и блока 15 поступают случайный сигнал с нормальным распределителем, в результате чего на выходе интегратора 13 устанавливается величина близкая к нулю или другая постоянная величина (что определяется конструкцией интеграторов), па выходе блока 15 вычисления дисперсии также устанавливается некоторая постоянная величина, определяемая параметрами npoirecca, конструкцией блока, реализующей npoipaMMbi вычисления дисперсии. Опорные напряжения обоих нуль-органов 14 и 16 выбраны в соответствии с напряжениями на выходах интегратора 13 и блока 15 при нормальной работе УВК.
При каких-либо оп1ибках в системе, в частности, необнаруженных ошибках СГЮ, нормальный закон распределения управляющих си1 на,1ов на выход УВМ, может нарушиться, что ведет к увеличению дисперсии сигнала, т. е. напряжепия на выходе блока 15. (При этом среднее значение контролируемого сигнала может остаться неизменным, т. е. сигнал на выходе интегратора 13 может оставаться неизменным). Как только величина сигнала на выходе блока 15 превысит порог срабатывания второго нуль-органа 16, на выходе последнего возникает единица, которая поступает на чет- верты) вх .)д схемы ИЛИ 12, единица с выхода которого поступает далее в пульт 4 управления, который отключает канал управления от УВЛ и подключает канал управления от локальной системы. Единица с выхода схемы П, 1П 12 попадает на первый вход пульта 4, подключает на второй вход вы ходного преобразователя 5 выход локального регулигора 3. Управляющее воздействие в регулято К 3 рассчитывается на основании И:|формации с блока датчиков 1, уставок пульта 4. рассчитанных иуске системы, а также управ:1яющих сигна.пов УВМ, выдаваемых в момент, предгпествуюпщй сбою и
которые хранились в памяти интегратора 7. В соответствии с заданным алгоритмом блок регуляторов 3 вырабатывает управляющий сигнал, поступающий после преобразования в преобразователе 5 на вход исполнительных механизмов. При возникновении ошибки, не приводящей к изменению дисперсии, т. е. срабатыванию второго нуль-органа 16, нарушается постоянство сигнала на выходе интегратора 13, что приводит к срабатыванию первого нуль-органа 14 и дальнейшему отключению канала управления от УВМ.
При сбое собственно УВМ, ведущему к прекращению генерации импульсов, на первом ее выходе, на выходе элемента 9 по истечению времени задержки, появляется единица, которая через схему ИЛИ 12 поступает на первый вход пульта 4 управления. Так же работает элемент 10, который при отсутствии генерации с выхода ЭВМ, вырабатывает на своем выходе нуль, который после инвертирования схемой 11 через схему 12 также поступает на первый вход пульта 4. В обоих случаях канал управления от УВМ отключается, включается по описанному алгоритму канал управления от блока локального регулятора 3.
Управление от блока локального регулятора 3 может производиться как в случао ощибки УВМ, так и по инициативе оператора. В последнем случае оператор с помощью пульта 4 задает начальные уставки и включает блок локальных регуляторов 3. Сигналы с блока датчиков 1 поступают на
0
5 5
0
0
первый вход блока 3 регуляторов, который вырабатывает управляющие сигналы, поступающие через преобразователи 5 на исполнительные механизмы 6.
В режиме ручного управления оператор с помощью пульта 4 подает на входы преобразователя 5 управляющие уставки, которые после преобразования поступают на исполнительные механизмы 6.
Таким образом, предлагаемая система по сравнению с известной позволяет повысить надежность определения момента нарушения нормального хода вычислительного процесса и тем самым повысить вероятность предотвращения аварии на управляемом объекте, т. е. повысить надежность управления технологическим процессом.
Применение данной системы позволяет повысить надежность функционирования АСУТП в случаях сбоев и отказов УВМ.
Формула изобретения
Система управления технологическим процессом по авт. св. № 1047565, отличающаяся тем, что, с целью повышения надежности системы в работе, она снабжена бло ком вычисления дисперсии и вторым нуль- органом, причем первый вход блока вычисления дисперсии соединен с выходом интегратора, второй вход - с вторым выходом УВМ, выход которого соединен с входом второго нуль-органа, выход которого соединен с четвертым входом схемы ИЛИ блока аварийного отключения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления технологическим процессом | 1982 |
|
SU1047565A2 |
| Система управления технологическим процессом | 1981 |
|
SU954128A1 |
| МНОГОКАНАЛЬНОЕ СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАРУШИТЕЛЕЙ | 2013 |
|
RU2598319C2 |
| Система управления технологическим процессом | 1978 |
|
SU702379A1 |
| Устройство для аварийного управления регулирующими органами | 1978 |
|
SU894677A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
| Устройство для управления контуром регулирования | 1980 |
|
SU892418A2 |
| Устройство для вычисления параметров управления вентильным преобразователем | 1980 |
|
SU949761A1 |
| Устройство для определения статического момента двигателя | 1991 |
|
SU1789887A1 |
Изобретение относится к автоматизированным системам управления технологическими процессами (АСУТП) с помощью управляющих вычислительных машин и может найти применение в АСУТП широкополосных станов горячей прокатки. Цель изобретения - повышение надежности работы системы. Система дополнительно снабжена блоком вычисления дисперсии и нуль-органом. Указанные блоки позволяют контролировать изменение дисперсии управляющего сигнала и по ее отличию от заданной сверх допустимого предела вырабатывать сигнал о наличии ошибки в системе. 1 ил.
| Система управления технологическим процессом | 1982 |
|
SU1047565A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
